




内容概览
- 😶🌫️说在最前面
- 🕶 概述
- 🕶 (address = 0x02) Driver Control Register 驱动控制寄存器 8.6.2.1
- 🕶 (address = 0x03) Gate Drive HS Register 高桥臂栅极控制寄存器 8.6.2.2
- 🕶 (address = 0x04) Gate Drive LS Register 低桥臂栅极控制寄存器8.6.2.3
- 🕶 (address = 0x05) OCP Control Register 过流保护控制寄存器 8.6.2.4
- 🕶 (address = 0x06) CSA Control Register 电流检测放大器控制寄存器8.6.2.5
-
- 🌌 Add06 - Bit10 - CSA_FET (Current Sense Amplifier)
- 🌌 Add06 - Bit9 - VREF_DIV
- 🌌 Add06 - Bit8 - LS_REF
- 🌌 Add06 - Bit7+Bit6 - CSA_GAIN
- 🌌 Add06 - Bit5 - DIS_SEN
- 🌌 Add06 - Bit4 - CSA_CAL_A (Current Sense Amplifier A_Calibration)
- 🌌 Add06 - Bit3 - CSA_CAL_B (Current Sense Amplifier B_Calibration)
- 🌌 Add06 - Bit2 - CSA_CAL_C (Current Sense Amplifier C_Calibration)
- 🌌 Add06 - Bit1+Bit0 - SEN_LVL
😶🌫️说在最前面
笔者计划使用一块使用到STM32F407控制芯片与DRV8323s驱动芯片的板子,驱动BLDC。了解到需要使用SPI通信来配置DRV8323s驱动芯片,配置过程中涉及DRV8323数据手册中提及的几个寄存器,故写此文做个记录。 另外,DRV8323芯片和DRV8302、DRV8303、DRV8353都有极大的相似之处,可以相互参考借鉴。
研究学习过程中,感觉能找到的资料不多,这里首先感谢一位大佬的帖👉CSDN文章:STM32G4系列通过SPI配置DRV8353S驱动芯片,给了我很大帮助!
🕶 概述
本文主要记录分析各个寄存器 各Bit 的功能含义。
关于寄存器的配置,详见数据手册英文版👉P58 –【8.6.2 Control Registers】👈(中文版PDF位置基本相同)。本文关于寄存器的表格截图均来源于此。
附TI官网数据手册下载链接: drv832x-Eng、drv832x-中文版。
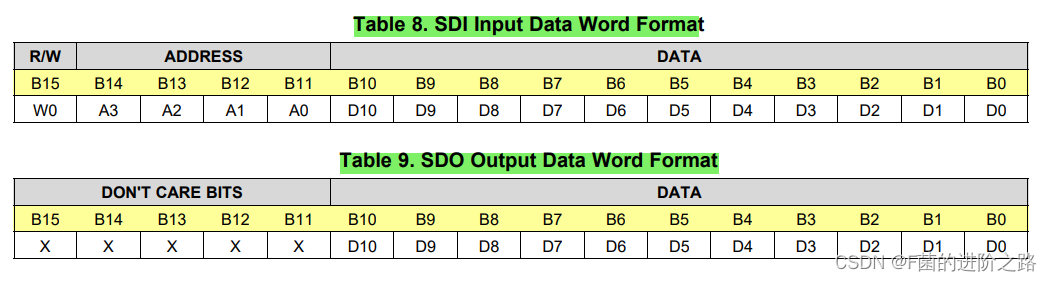
对寄存器操作的基本数据格式:
SPI 输入数据 (SDI) 字有 16-bit,其中 5-bit 命令和 11-bit 数据。 命令位中:读操作(B15) W0 = 1,写操作(B15) W0 = 0;(B14~B11) A3~A0是地址位。
SPI 输出数据 (SDO) 字有 16-bit,其中前 5-bit 是无关位,后 11-bit 是寄存器数据。
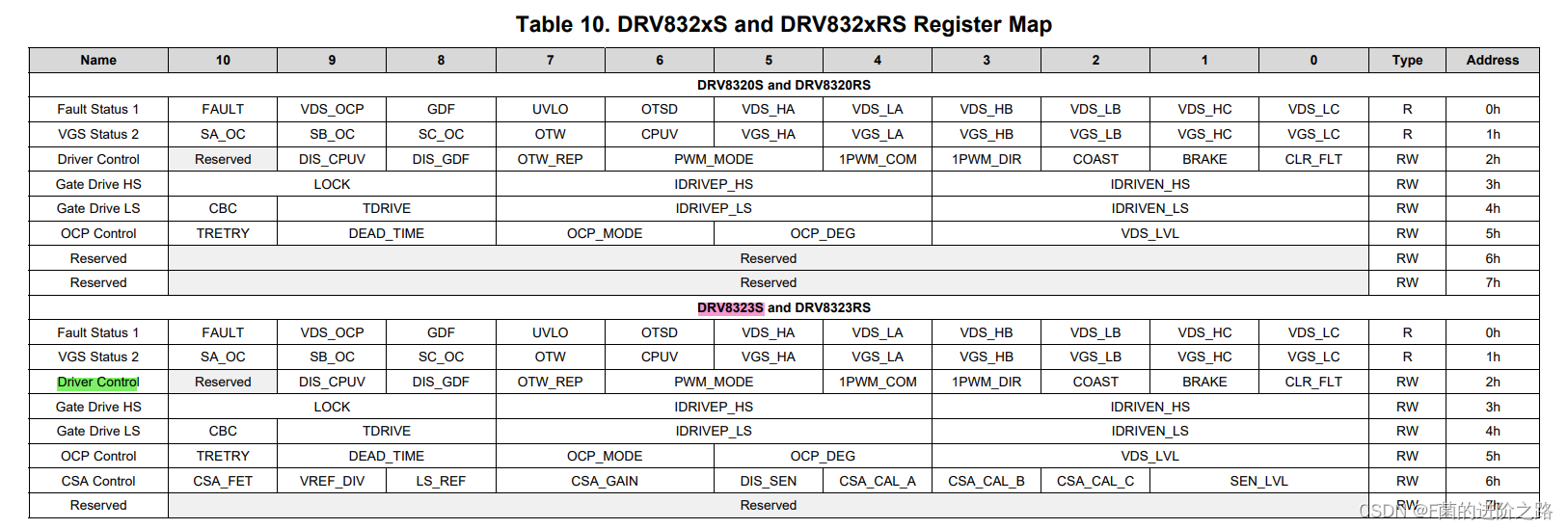
地址0x00和0x01为只读寄存器,指示故障状态,此处略。对照表格看即可。
接下来对照表格,梳理一下从地址0x02到0x06寄存器的情况。
🕶 (address = 0x02) Driver Control Register 驱动控制寄存器 8.6.2.1
寄存器类型:R/W,读或写。

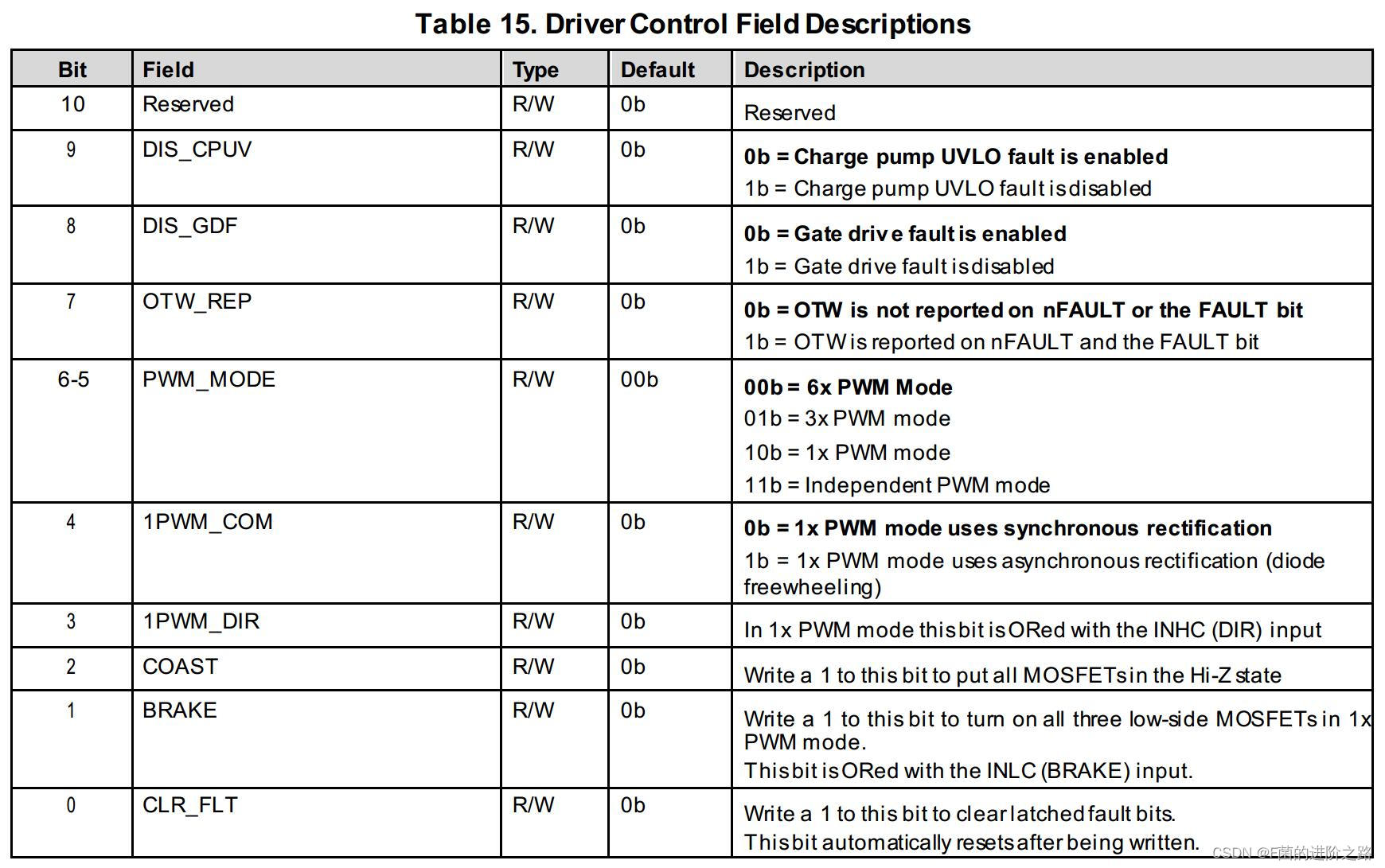
🌌 Add02 - Bit10 - Reserved
保留位,必须按要求来。
Bit10 - Reserved = 0b。
🌌 Add02 - Bit9 - DIS_CPUV
设置充电荷泵UVLO故障是否开启。
这里选择默认值Bit9 - DIS_CPUV = 0b,开启。
🌌 Add02 - Bit8 - DIS_GDF
设置栅极驱动故障是否开启。
这里选择默认值Bit8 - DIS_GDF = 0b,开启。
🌌 Add02 - Bit7 - OTW_REP
设置nFAULT或FAULT位上是否报告OTW热警告。
这里选择默认值Bit7 - OTW_REP = 0b,不报告。
🌌 Add02 - Bit6+Bit5 - PWM_MODE
设置PWM控制模式。详见👉P30 -【8.3.1.1 PWM Control Modes】👈。
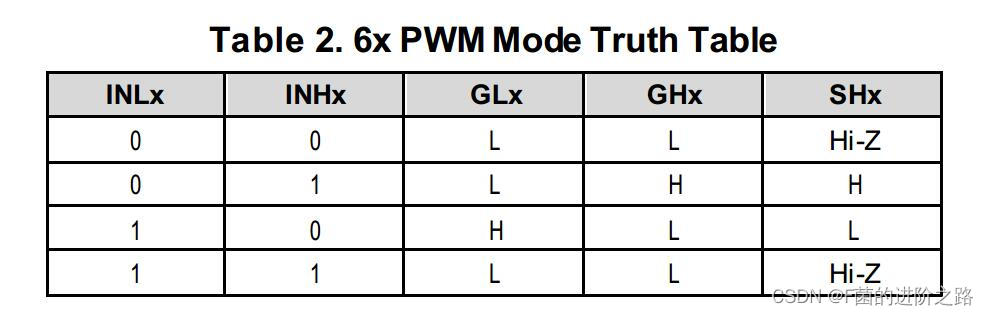
这里选择默认值Bit6+Bit5 - PWM_MODE = 00b,采用6x PWM Mode。
🌌 Add02 - Bit4 - 1PWM_COM
选择1x PWM模式时是同步整流还是异步整流。
因为没选1x PWM mode,所以就先保留默认值Bit4 - 1PWM_COM = 0b。
🌌 Add02 - Bit3 - 1PWM_DIR
在1x PWM模式下,此位与INHC(DIR)输入进行“或”运算。
因为没选1x PWM mode,所以就先保留默认值Bit3 - 1PWM_DIR = 0b。
🌌 Add02 - Bit2 - COAST
向该位写入1,使所有MOSFET处于Hi-Z状态(high-impedance,高阻抗状态)。
选择默认值Bit2 - COAST = 0b,不进入高阻抗状态。
🌌 Add02 - Bit1 - BRAKE
以在1x PWM模式下,将1写入该位,导通所有三个低侧MOSFET。该位与INLC(BRAKE)输入进行“或”运算。
选择默认值Bit1 - BRAKE = 0b。
🌌 Add02 - Bit0 - CLR_FLT
将1写入该位以清除锁存的故障位。此位在写入后自动复位。
要用到时再写1清除吧,初始时Bit0 - CLR_FLT = 0b。</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 383
383






 到【灌水乐园】发言
到【灌水乐园】发言







