






 本文介绍了HC-SR04超声波测距模块,它可提供2cm - 400厘米非接触式距离感测,精度达3毫米。阐述了其外观、引脚连接,基本原理是TRIG触发发送声波,ECHO接收,通过测量ECHO高低电平时间测距,还给出计算公式及51和stm32的测试代码。
本文介绍了HC-SR04超声波测距模块,它可提供2cm - 400厘米非接触式距离感测,精度达3毫米。阐述了其外观、引脚连接,基本原理是TRIG触发发送声波,ECHO接收,通过测量ECHO高低电平时间测距,还给出计算公式及51和stm32的测试代码。
超声波用于避障,测距之类的,是比较简单的传感器
datasheet 下载地址
外观
HC-SR04超声波测距模块可提供约2cm400厘米的非接触式距离感测功能,测距精度可达高到3毫米;模块包括超声波发射器,接收器与控制电路像智能小车的测距以及转向,或是一些项目中,常常会用到。智能小车测距可以及时发现前方的障碍物,使智能小车可以及时转向,避开障碍物。
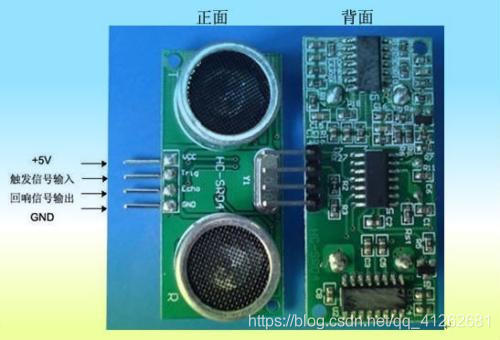
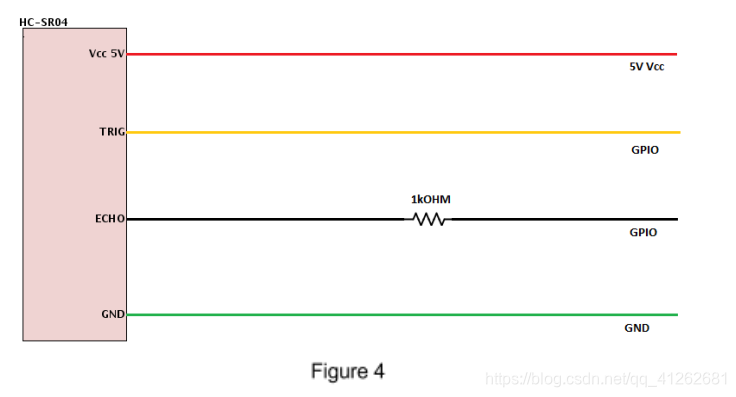
HC-SR04有4个引脚:VCC,GND,TRIG和ECHO。
- VCC是5v电源。这应该来自微控制器
- GND是接地引脚。在微控制器上接地。
- TRIG应连接到可设置为HIGH的GPIO引脚
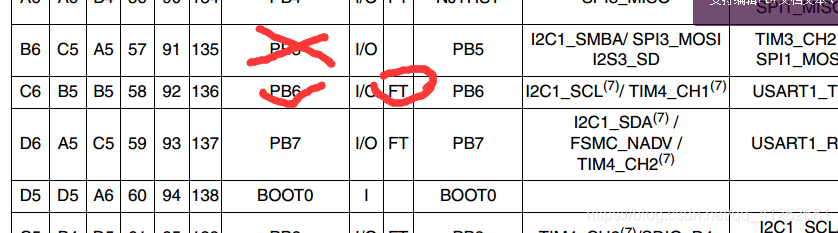
ECHO有点困难。HC-SR04输出5v,可能会破坏许多微控制器GPIO引脚(最大允许电压变化)。为了降压,使用单个电阻器或分压器电路。这又取决于您使用的特定微控制器,您需要找出其GPIO最大电压并确保低于该值。(只限于FT引脚),也就是ECHO对于stm32只能连在FT引脚上!!
基本原理
TRIG引脚负责发送超声波脉冲串。此引脚应设置为高电平10μs,此时HC-SR04将以40 kHZ发出8个周期的声波脉冲。发出声波爆发后,ECHO引脚将变为高电平。 ECHO引脚是数据引脚 - 用于进行距离测量。发送超声波脉冲串后, ECHO引脚将变为高电平,它将保持高电平,直到检测到超声波脉冲串为止,此时它将变为低电平。
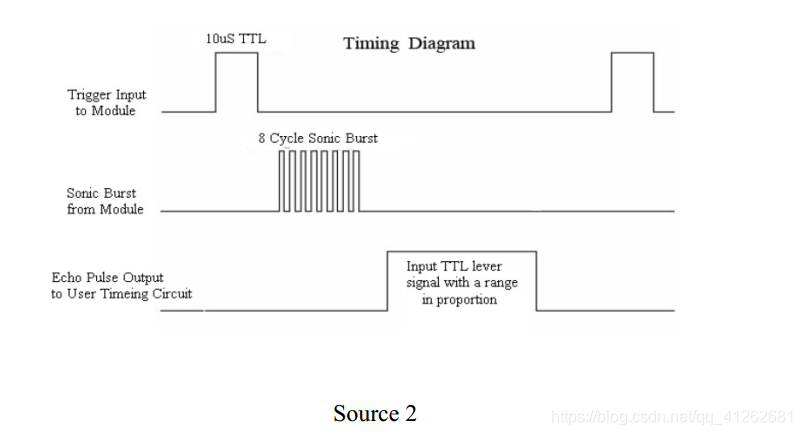
就是TRIG引脚给一个持续10us的高电平,触发超声波模块自动发送8个40khz的方波,发出声波后,ECHO引脚会被拉高,待接收到之后,ECHO引脚拉低,我们只要测出ECHO引脚从拉高到拉低的时间就可以知道距离了
计算公式
我们知道声速是340m/s
根据x=vt
因为超声波发送出去和回来是测量距离的两倍,所以假设距离是L
2L=344xt
t我们用定时器测出来
一般都是us
所以就是tx172x10的-6次方=L,L单位为cm
最终的出 L= t(us) * 0.0172(cm/us)
0.0172=1/58
所以 L= t(us)/58(cm)
对于51单片机,12mhz的周期时间为1us
所以11.059200mzh的计算公式为
L = 计数 x(12/11.0592) x (1/58)
= 计数 x 0.0187
= (计数 x 1.87)/100(cm)
测试代码
51&15
//#include <reg52.h>
#include "stc15.h"
#include <intrins.h>
#include <stdio.h>
typedef unsigned char u8;
typedef unsigned int u16;
typedef unsigned long u32;
sbit Echo=P3^2;//超声波模块echo脚定义
sbit Trig=P3^3;//超声波模块trig脚定义
u16 time=0;
float Distance=0;
bit flag=0;//定时器0溢出标志位
void Config_UARTimer(u16 Baud);//配置串口,定时器
void Delay10us_15(void);//15延时10us程序
void Delay10us_51(void);//51延时10us程序
void delayms(u16 ms);//ms延时程序
void StartModule();//打开超声波测距
void Count_Distance();//计算距离
void main()
{
Config_UARTimer(9600);
while(1)
{
StartModule();
while(!Echo);
TR0=1;
while(Echo);
TR0=0;
Count_Distance();
delayms(100);
}
}
//15延时10us程序
void Delay10us_15(void)
{
u8 i=30;
_nop_();
while(--i);
}
//51延时10us程序
void Delay10us_51(void)
{
u8 i=15;
_nop_();
while(--i);
}
//ms延时程序
void delayms(unsigned int ms)
{
unsigned char i=100,j;
for(;ms;ms--)
{
while(--i)
{
j=10;
while(--j);
}
}
}
//打开超声波测距
void StartModule()
{
Trig=1;
Delay10us_51();
Trig=0;
}
void Count_Distance()
{
time=TH0*256+TL0;
TH0=0;
TL0=0;
Distance = (time*1.87)/100;
if(flag==1) //超出测量
{
flag=0;
printf("-----\n");
}
else
{
printf("Distance = %f CM\n",Distance);
}
}
void Config_UARTimer(u16 Baud)
{
//需要配置串口,定时器0,定时器1
// //15单片机配置
// PCON &= 0x7F; //不倍速
// SCON = 0x50; //工作方式1,8位异步
// AUXR &= 0xBF; //定时器1时钟为Fosc/12,即12T
// AUXR &= 0xFE; //串口1选择定时器1为波特率发生器
// TMOD &= 0x0F;
// TMOD|=0X21;//定时器1工作方式2(8位定时器),定时器0工作方式1(16位定时器)
//
// TH0=0;
// TL0=0;//定时器0初值赋值
//
// TH1=256-(11059200/12/32)/Baud;
// TL1=TH1;//定时器1初值赋值
//
// ET0=1;//定时中断0打开
// ET1=0;//定时中断1禁止
// TR0=1;//定时器0打开
// TR1=1;//定时器1打开
// TI=1;
//51单片机配置程序
PCON&=0X7F;//不倍速
SCON=0X50;//工作方式1,8位异步
TMOD=0X21;//定时器1工作方式2(8位定时器),定时器0工作方式1(16位定时器)
TH0=0;
TL0=0;//定时器0初值赋值
TH1=256-(11059200/12/32)/Baud;
TL1=TH1;//定时器1初值赋值
ET0=1;//定时中断0打开
ET1=0;//定时中断1禁止
TR0=1;//定时器0关闭
TR1=1;//定时器1打开
TI=1;
EA=1;//打开总中断
}
void timer0()interrupt 1
{
flag=1;
}
stm32
hcsr04.c
#include "hcsr04.h"
#include "delay.h"
u16 overcount=0;//溢出计数
//中断配置
void NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStruct;
//设置中断优先级
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//中断初始化
NVIC_InitStruct.NVIC_IRQChannel=TIM2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority=0;
NVIC_Init(&NVIC_InitStruct);
}
//超声波初始化
void HCSR04_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
//时钟使能
RCC_APB2PeriphClockCmd(HCSR04,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
//trig脚-推挽输出
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=HCSR04_TRIG;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(HCSR04_PORT,&GPIO_InitStruct);
GPIO_ResetBits(HCSR04_PORT,HCSR04_TRIG);
//echo脚-浮空输入
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin=HCSR04_ECHO;
GPIO_Init(HCSR04_PORT,&GPIO_InitStruct);
GPIO_ResetBits(HCSR04_PORT,HCSR04_ECHO);
//定时器TIM2初始化
TIM_DeInit(TIM2);
TIM_TimeBaseInitStruct.TIM_Period=1000-1;
TIM_TimeBaseInitStruct.TIM_Prescaler=72-1;
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
//定时器中断配置_更新中断
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
//中断配置
NVIC_Config();
//关闭定时器使能
TIM_Cmd(TIM2,DISABLE);
}
//打开定时器
void OpenTimeForHc(void)
{
//计数器清空
TIM_SetCounter(TIM2,0);
overcount=0;
TIM_Cmd(TIM2,ENABLE);
}
//关闭定时器
void CloseTimeForHc(void)
{
TIM_Cmd(TIM2,DISABLE);
}
//获取定时器时间
u32 GetEchoTimer(void)
{
u32 t=0;
t=overcount*1000;
t+=TIM_GetCounter(TIM2);
//计数器清0
TIM2->CNT=0;
delay_ms(50);
return t;
}
//超声波测距
float Hcsr04GetLength(void)
{
u32 t=0;
int i=0;
float lengthTemp=0;
float sum=0;
while(i!=5)
{
TRIG_Send=1;
delay_ms(20);
TRIG_Send=0;
while(ECHO_Reci==0);
OpenTimeForHc();
i=i+1;
while(ECHO_Reci==1);
CloseTimeForHc();
t=GetEchoTimer();
lengthTemp=((float)t/58.0);
sum+=lengthTemp;
}
lengthTemp=sum/5;
return lengthTemp;
}
//定时器2中断
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update)!=RESET)
{
//清除中断标志位
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
overcount++;
}
}
hcsr04.h
#ifndef __HCSR04_H
#define __HCSR04_H
#include "sys.h"
#define HCSR04_PORT GPIOB
#define HCSR04 RCC_APB2Periph_GPIOB
#define HCSR04_TRIG GPIO_Pin_5
#define HCSR04_ECHO GPIO_Pin_6
#define TRIG_Send PBout(5)
#define ECHO_Reci PBin(6)
void NVIC_Config(void);//中断配置
void HCSR04_Init(void);//超声波初始化
float Hcsr04GetLength(void);//超声波测距
#endif

















 5552
5552

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









