







 该研究提出了一种通过追踪ADS-B传感器时钟偏移来检测异常和入侵的方法。利用ADS-B消息到达时间差,无需多点定位算法,即可检测潜在的机载异常或伪造消息。通过卡尔曼滤波器对时钟偏移进行跟踪和估计,能有效检测ADS-B消息中的位置信息准确性,避免依赖复杂的定位反演问题,同时减少对卫星导航系统的依赖。
该研究提出了一种通过追踪ADS-B传感器时钟偏移来检测异常和入侵的方法。利用ADS-B消息到达时间差,无需多点定位算法,即可检测潜在的机载异常或伪造消息。通过卡尔曼滤波器对时钟偏移进行跟踪和估计,能有效检测ADS-B消息中的位置信息准确性,避免依赖复杂的定位反演问题,同时减少对卫星导航系统的依赖。
paper: ADS-B Anomalies and Intrusions Detection by Sensor Clocks Tracking
一、摘要
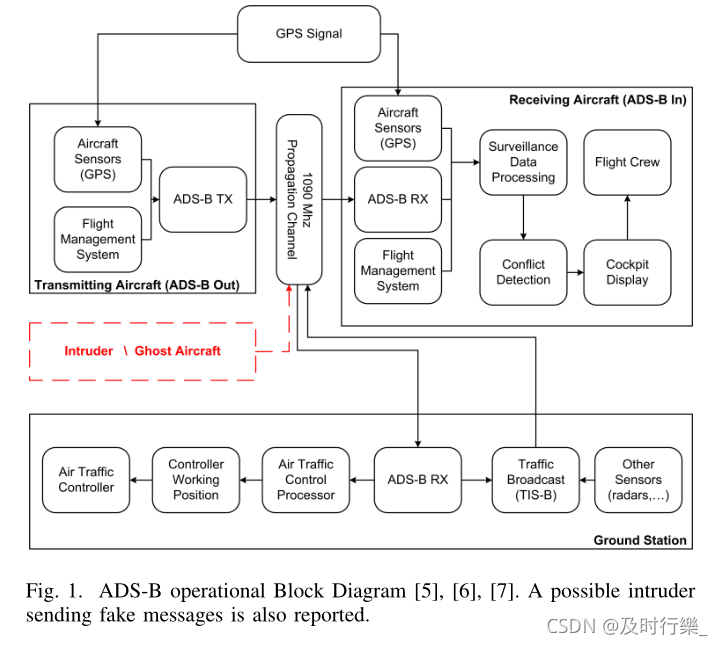
自动相关监视广播(ADSB)是一种空中交通管制系统,其中飞机向地面传感器传输其自身信息(身份、位置、速度等),用于监视范围。提出了利用ADSB消息到达时间差来跟踪不同传感器的时钟,以检查ADS-B消息中包含的位置信息的准确性。该方法允许在不使用多分支(或任何其他)定位算法的情况下检测可能的车载异常或恶意注入假消息(入侵)。因此,它不需要对定位问题进行反演(通常是强非线性和不适定的),并且与多面定位相反,它也适用于少于4个传感器。
二、背景
ADS-B系统具有许多优点,例如,易于实现且成本低,位置数据精度高,更新时间短。
它们也有一些重要的缺点,例如:依赖卫星导航系统(可能被破坏、损坏或干扰),以及非常简单的协议,没有加密和任何身份验证。由于这些原因,安全方面可能是这些监视系统的一个重要漏洞。
- Eavesdropping 窃听
- Jamming 干扰
- Message injection (or spoofing) 信息欺骗(信息攻击)
- Message deletionby SSR reply Garbling 通过SSR回复混淆删除消息
- GPS欺骗/干扰产生虚假或错误信息或降低系统可用性。
MLAT Multilateration 多点定位
通过双曲线定位提供飞机的独立位置信息。MLAT的最大缺点是:需要至少4个传感器接收相同的信息,需要反演通常是强非线性和不适定性的定位问题(在解决方案中产生数值不稳定性),以及需要所有传感器共用一个时间,即时间同步。
本文的方法
使用ADS-B消息的测量到达时差(TDOA)来同步(计算与公共参考相关的时间偏移)传感器,然后直接对估计偏移执行一致性测试,而不计算飞机位置。
可以避免与机载位置信息上的错误或虚假位置信息有关的漏洞。
三、模式S传感器偏移量使用ADS-BTRAFFIC进行测量
(一)利用ADS-B信息到达时差测量传感器时钟偏移
s 1 s_1 s1和 s 2 s_2 s2表示两个ADS-B接收站, p 1 p_1 p1表示飞机,接收站和飞机的位置为: s 1 = [ s 1 , x , s 1 , y , s 1 , z ] T s 2 = [ s 2 , x , s 2 , y , s 2 , z ] T p 1 = [ p 1 , x , p 1 , y , p 1 , z ] T s_1=[s_{1,x},s_{1,y},s_{1,z}]^T\\\;\\s_2=[s_{2,x},s_{2,y},s_{2,z}]^T\\\;\\ p_1=[p_{1,x},p_{1,y},p_{1,z}]^T s1=[s1,x,s1,y,s1,z]Ts2=[s2,x,s2,y,s2,z]Tp1=[p1,x,p1,y,p1,z]T飞机和站点之间的范围可表示为: ρ 1 = ∣ ∣ s 1 − p 1 ∣ ∣ = ( s 1 , x − p 1 , x ) 2 + ( s 1 , y − p 1 , y ) 2 + ( s 1 , z − p 1 , z ) 2 ρ 2 = ∣ ∣ s 2 − p 1 ∣ ∣ = ( s 2 , x − p 1 , x ) 2 + ( s 2 , y − p 1 , y ) 2 + ( s 2 , z − p 1 , z ) 2 . . . . . . ( 1 ) \rho_1=||s_1-p_1||=\sqrt{(s_{1,x}-p_{1,x})^2+(s_{1,y}-p_{1,y})^2+(s_{1,z}-p_{1,z})^2}\\\;\\ \rho_2=||s_2-p_1||=\sqrt{(s_{2,x}-p_{1,x})^2+(s_{2,y}-p_{1,y})^2+(s_{2,z}-p_{1,z})^2}\\ ......(1) ρ1=∣∣s1−p1∣∣=(s1,x−p1,x)2+(s1,y−p1,y)2+(s1,z−p1,z)2ρ2=∣∣s2−p1∣∣=(s2,x−p1,x)2+(s2,y−p1,y)2+(s2,z−p1,z)2......(1)
两个接收站接受信息的时间分别为 t 1 t_1 t1和 t 2 t_2 t2, t 1 = t 0 + ∣ ∣ s 1 − p 1 ∣ ∣ c t 2 = t 0 + ∣ ∣ s 2 − p 1 ∣ ∣ c + Δ t 2 , 1 . . . . . . ( 2 ) t_1=t_0+\frac{||s_1-p_1||}c\\\;\\ t_2=t_0+\frac{||s_2-p_1||}c+\Delta t_{2,1}\\ ......(2) t1=t0+c∣∣s1−p1∣∣t2=t0+c∣∣s2−p1∣∣+Δt2,1......(2)其中 t 0 t_0 t0表示消息传输的时间(这个时间是未知的), Δ t 2 , 1 \Delta t_{2,1} Δt2,1表示 s 2 s_2 s2和 s 1 s_1 s1之间的时间偏移(也是不知道的)。所以如果能够测出到达时间,就能得到到达的时间差,就能消除 t 0 t_0 t0的影响。 t 2 , 1 = t 2 − t 1 = ∣ ∣ s 2 − p 1 ∣ ∣ − ∣ ∣ s 1 − p 1 ∣ ∣ c + Δ t 2 , 1 . . . . . . ( 3 ) t_{2,1}=t_2-t_1=\frac{||s_2-p_1||-||s_1-p_1||}c+\Delta t_{2,1}\;\;......(3) t2,1=t2−t1=c∣∣s2−p1∣∣−∣∣s1−p1∣∣+Δt2,1......(3)超过两个接收站,公式可以概括为: t i , 1 = t i − t 1 = ∣ ∣ s i − p 1 ∣ ∣ − ∣ ∣ s 1 − p 1 ∣ ∣ c + Δ t i , 1 . . . . . . ( 4 ) t_{i,1}=t_i-t_1=\frac{||s_i-p_1||-||s_1-p_1||}c+\Delta t_{i,1}\;\; ......(4) ti,1=ti−t1=c∣∣si−p1∣∣−∣∣s1−p1∣∣+Δti,1......(4)也就是将传感器 S 1 S_1 S1视为参考传感器(所有偏移量均按此偏移量计算)。
如果通过ADS-B的消息知道了飞机位置,可以估计时钟偏移: Δ t i , 1 = t i , 1 − ∣ ∣ s i − p 1 ∣ ∣ − ∣ ∣ s 1 − p 1 ∣ ∣ c . . . . . . ( 5 ) \Delta t_{i,1}=t_{i,1}-\frac{||s_i-p_1||-||s_1-p_1||}c\;\; ......(5) Δti,1=ti,1−
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









