










前言
这一次的秘技接着上一次的来讲,模块的介绍和原理详解见上一期常用模块原理程序秘技——超声波模块HC-SR04(1),本一期主要讲用STM32的输入捕获来实现超声波测距。
原理和程序
原理
原理这块主要解释解释什么是输入捕获,这里仅是粗略的说一说,具体的关于什么是输入捕获,从网上各种资料以及我的另一篇文章STM32的输入捕获来了解。
程序
引脚连接:
| MCU | HC-SR04 |
|---|---|
| 3.3V | VCC |
| PA6 | Trig |
| PA7 | Echo |
| GND | GND |
使用定时器的输入捕获模式实现超声波测距完整程序:
//定时器3通道2输入捕获配置
TIM_ICInitTypeDef TIM3_ICInitStructure;
void TIM3_Cap_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能TIM3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //PA7 清除之前设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA7 输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_7); //PA7 下拉
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //PA6 清除之前设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //PA6 输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//初始化定时器3 TIM3
TIM_TimeBaseStructure.TIM_Period = 65535; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =71; //预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3输入捕获参数通道2
TIM3_ICInitStructure.TIM_Channel = TIM_Channel_2; //选择输入端 IC2映射到TI2上
TIM3_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM3_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI2上
TIM3_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM3_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波
TIM_ICInit(TIM3, &TIM3_ICInitStructure);
TIM_ITConfig(TIM3,TIM_IT_CC2|TIM_IT_Update,ENABLE);//允许更新中断 ,允许CC2IE捕获中断
TIM_Cmd(TIM3,ENABLE ); //使能定时器3
//中断分组初始化
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级0级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
}
下面分段解释:
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能TIM3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //PA7 清除之前设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA7 输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_7); //PA7 下拉
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //PA6 清除之前设置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //PA6 输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
对定时器和引脚时钟使能,定时器arr寄存器(自动重装载值)给65535(尽量测大的脉宽),分频系数给71,这样出来的定时器频率是1MHz。要注意的地方是输入捕获的引脚Echo_PA7配置成GPIO_Mode_IPD下拉输入,PA6作为Trig配置成输出。
//初始化定时器3 TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
初始化定时器。
//初始化TIM3输入捕获参数通道2
TIM3_ICInitStructure.TIM_Channel = TIM_Channel_2; //选择输入端 IC2映射到TI2上
TIM3_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM3_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI2上
TIM3_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM3_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输入滤波器 不滤波
TIM_ICInit(TIM3, &TIM3_ICInitStructure);
初始化输入捕获参数;
第2行程序TIM_Channel_2决定了选择的捕获通道是IC2;
第3行TIM_ICPolarity_Rising决定了捕获边沿类型是上升沿捕获;
第4行TIM_ICSelection_DirectTI决定了定时器的CH1,CH2,CH3,CH4直连到捕获通道IC1,IC2,IC3,IC4;
第5行配置输入不分频。
第6行配置对输入信号不滤波。
TIM_ITConfig(TIM3,TIM_IT_CC2|TIM_IT_Update,ENABLE);//允许更新中断 ,允许CC2IE捕获中断
TIM_Cmd(TIM3,ENABLE ); //使能定时器3
//中断分组初始化
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级0级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
使能定时器,以及使能更新中断和捕获事件中断。更新中断TIM_IT_Update和捕获事件中断TIM_IT_CC2有什么区别呢?
1.捕获事件中断就是发生捕获事件时产生中断,比如你之前定义的捕获边沿类型是上升沿,那么捕获到上升沿时就会产生这个捕获事件中断。
2.更新中断是计数器计到arr寄存器的值,也就是你初始化定时器时的自动重装载值时,产生一个中断。平时用的最普通的定时器中断就是更新中断。
中断函数和处理函数
//捕获状态
//[7]:0,没有成功的捕获;1,成功捕获到一次.
//[6]:0,还没捕获到边沿;1,已经捕获到边沿了.
//[5:0]:捕获边沿电平后溢出的次数(对于32位定时器来说,1us计数器加1,溢出时间:4294秒)
u8 TIM3CH2_CAPTURE_STA=0; //输入捕获状态
u16 TIM3CH2_CAPTURE_VAL; //输入捕获值
//定时器3中断服务程序
void TIM3_IRQHandler(void)
{
if((TIM3CH2_CAPTURE_STA&0X80)==0)//还未成功捕获
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET)
{
if(TIM3CH2_CAPTURE_STA&0X40)//已经捕获到高电平了
{
if((TIM3CH2_CAPTURE_STA&0X3F)==0X3F)//高电平太长了
{
TIM3CH2_CAPTURE_STA|=0X80;//标记成功捕获了一次
TIM3CH2_CAPTURE_VAL=0XFFFF;
}else TIM3CH2_CAPTURE_STA++;
}
}
if (TIM_GetITStatus(TIM3, TIM_IT_CC2) != RESET)//捕获1发生捕获事件
{
if(TIM3CH2_CAPTURE_STA&0X40) //捕获到一个边沿
{
TIM3CH2_CAPTURE_STA|=0X80; //标记成功捕获到一次
TIM3CH2_CAPTURE_VAL=TIM_GetCapture2(TIM3);
TIM_OC2PolarityConfig(TIM3,TIM_ICPolarity_Rising); //CC1P=0 设置为上升沿捕获
}
else //还未开始,第一次捕获上升沿
{
TIM3CH2_CAPTURE_STA=0; //清空
TIM3CH2_CAPTURE_VAL=0;
TIM_SetCounter(TIM3,0);
TIM3CH2_CAPTURE_STA|=0X40; //标记捕获到了上升沿
TIM_OC2PolarityConfig(TIM3,TIM_ICPolarity_Falling); //CC1P=1 设置为下降沿捕获
}
}
}
TIM_ClearITPendingBit(TIM3, TIM_IT_CC2|TIM_IT_Update); //清除中断标志位
}
这是中断服务函数,这个函数来自正点原子的程序,些许不同。由于程序较长,我们按照一段脉冲信号进入输入捕获引脚的顺序来说。
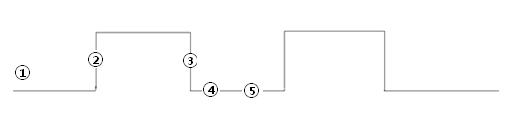
- ①段,程序在if((TIM3CH2_CAPTURE_STA&0X80)==0){}内,但并不执行里面的任何语句,因为没有产生更新中断或者捕获事件中断;
- ②段,这是个上升沿,产生了捕获事件中断,程序来到了33行的这段else{},TIM3CH2_CAPTURE_STA的6位置1,标志着已经捕获到了上升沿,将参数清0,将CNT计数器置0,然后将捕获类型改设置为下降沿捕获,为了等待③下降沿;
- ③段,这是个下降沿,产生了捕获事件中断,此时CNT计数器的值到了CCRx寄存器,程序来到了27行的这段if(TIM3CH2_CAPTURE_STA&0X40){},TIM3CH2_CAPTURE_STA的7位置1,标志成功完成了一次捕获上升沿和下降沿,将此时的TIMx->CCRx寄存器的值取出赋给TIM3CH2_CAPTURE_VAL,这时已经完成一次测脉宽。然后将捕获类型改设置为上升沿捕获。
- 因为if((TIM3CH2_CAPTURE_STA&0X80)==0){}条件已经不满足,所以之后并未再进入这个中断函数,除非TIM3CH2_CAPTURE_STA的最高位置0。
- 还有一个部分没有讲到,就是14行的if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET){}这段更新中断,这段的意义在于,如果②和③间的脉宽太长,导致CNT计数器计数时到了ARR寄存器给的最大值,又会变成0,这样的话测的脉宽肯定是有问题的。面对这种情况,可以在更新中断中,记录下溢出的次数,以便准确的到脉宽。
为了获得脉宽值,可以用一个这样的函数:
void get(void)
{
if(TIM3CH2_CAPTURE_STA&0X80) //成功捕获到了一次高电平
{
temp=TIM3CH2_CAPTURE_STA&0X3F;
temp*=0XFFFF; //溢出时间总和
temp+=TIM3CH2_CAPTURE_VAL; //得到总的高电平时间
TIM3CH2_CAPTURE_STA=0; //开启下一次捕获
}
}
接着上一段的第4点,此时已经测了一段完整脉宽。
- 首先得到溢出次数,将这个次数乘上定时器初始化时的arr值,如果你也是给的65535,那么就是0xFFFF。这是溢出一次的经历时间。
- 将溢出的总时间,加上TIM3CH2_CAPTURE_VAL。
- 将TIM3CH2_CAPTURE_STA置0,开启下一次捕获。
- 用过这个函数后,temp变量里的值就是最后的脉宽了,如果你的定时器频率也是1MHz,那么脉宽的单位是us。
将这段函数放进主函数里作为while(1)的一部分:
#define Trig_Pin PAout(6) // Trig
int main(void)
{
u16 Distance;
u16 temp=0;
NVIC_Configuration();//设置NVIC中断分组2:2位抢占优先级,2位响应优先级
delay_init(); //延时函数初始化
uart_init(9600); //串口初始化为9600
TIM3_Cap_Init(); //以1Mhz的频率计数
LCD_Init();
POINT_COLOR=RED;
LCD_ShowString(80,100,200,24,24,"Distance");
while(1)
{
Trig_Pin=1;
delay_us(12);
Trig_Pin=0;
if(TIM3CH2_CAPTURE_STA&0X80) //成功捕获到了一次高电平
{
temp=TIM3CH2_CAPTURE_STA&0X3F;
temp*=0XFFFF; //溢出时间总和
temp+=TIM3CH2_CAPTURE_VAL; //得到总的高电平时间
TIM3CH2_CAPTURE_STA=0; //开启下一次捕获
}
Distance =temp*340/1000/2; //测量距离单位mm
LCD_ShowNum(100,150,Distance/1000,1,24);
LCD_ShowChar(112,150,'.',24,0);
LCD_ShowNum(124,150,Distance%1000/100,1,24);
LCD_ShowNum(136,150,Distance%100/10,1,24);
LCD_ShowNum(148,150,Distance%10,1,24);
LCD_ShowString(160,150,24,12,24,"M");
delay_ms(100);
}
}
将以上的部分,加上变量的定义和函数的声明,即可完成程序。
奉上完整工程:
链接:https://pan.baidu.com/s/16K0xikBEu9rTgPdYBzUUTA
提取码:6757
结语
以上就是全部内容啦!















 7411
7411











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









