






前言
上一节讲到了多比特信号的跨时钟域设计,这一节深入一点,讲多比特信号的跨时钟域设计。
多比特信号的跨时钟域设计无法使用 2 flop synchornizer来解决。
一、使用打两拍的方法来同步多比特信号
下面给出使用“打两拍”的方法同步多比特信号的情况:
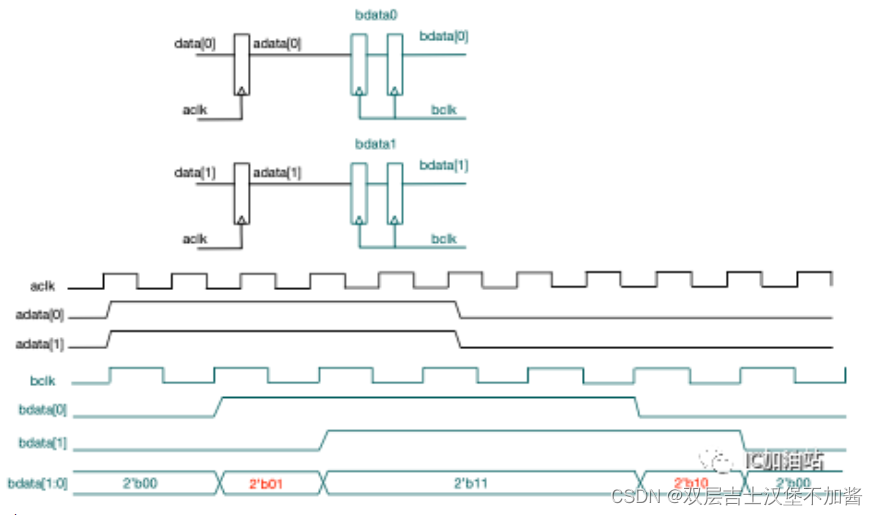
由于打两拍的第一拍出现了亚稳态,导致有一个信号亚稳态出来是0 ,一个信号亚稳态出来是1,这样的话导致信号晚了一拍拉高,出现了错误的值。
二、使用load信号进行多比特的同步
多比特的跨时钟域同步核心就是确保不产生metstable,使用load信号,来指示信号是否是稳定的,然后进行数据采样。
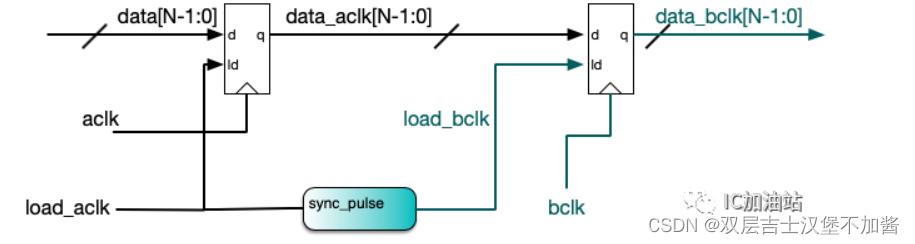
这个sync plus 跟我们上一节一样,将level信号转换成两个plus信号,b时钟域在plus之间采样。
三、使用异步fifo
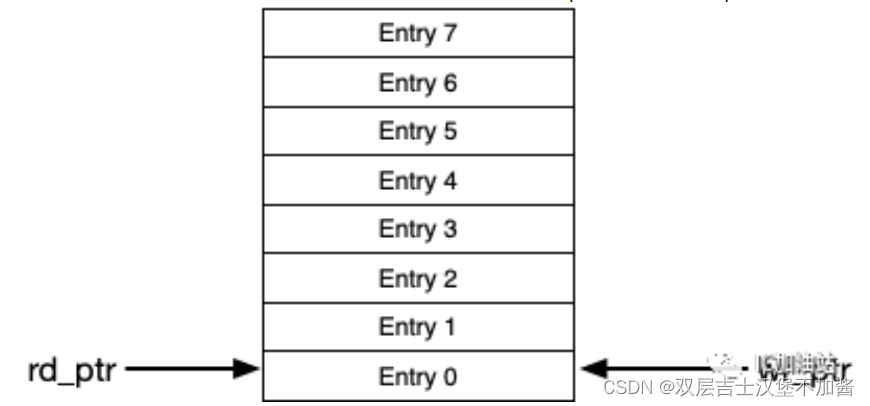
同步fifo计算空满非常容易,因为同时知道rd_ptr和wr_ptr在哪个位置。
但是对于异步fifo来讲,读和写处在不同的时钟域,这样的话读写指针就需要互相sync,在读这一侧,满不满不重要,满了可以读,他需要判断是否是空的那么什么时候是空的。对于写这一侧,空不空不重要,空了肯定可以写,他需要判断fifo什么时候是满的,那之间讲过,多比特数据同步要使用异步fifo,怎么到l我们这边设计异步FIFO的时候就又要基于多比特数据同步呢。
别急,这个指针的同步使用了特殊的编码规则,格雷码,格雷码编码作为计数器每次只有一位发生突变。
这样的话,这样的话同步到另一时钟域,可能需要一周期或者两周期,不过由于其他bit的数据是保持稳定的,这样的话,数据不会出错。
在格雷码下如何判断空满呢:
当wr_ptr == rd_ptr时,fifo为空;
当wr_ptr 的高两位和 rd_ptr的高两位是取反,低位相等时,fifo为满。
assign full = (write_ptr_gray[N:N-1] == ~read_ptr_gray[N:N-1])
&&(write_ptr_gray[N-2:0] == read_ptr_gray[N-2:0]);














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









