







 文章讲述了机器人车体从pcb底板到pla外壳的改版过程,强调了底盘稳定性、舵机功能调整以及驱动芯片选择对性能的影响。在底盘设计中加入了撑脚以提高稳定性,同时指出舵机不适合用于凿击并改为举升设计。在驱动芯片方面,对比了RZ7899和AT8236的性能,最终选择了后者以解决PWM频率问题。陀螺仪的减震设计也有助于提升稳定性。
文章讲述了机器人车体从pcb底板到pla外壳的改版过程,强调了底盘稳定性、舵机功能调整以及驱动芯片选择对性能的影响。在底盘设计中加入了撑脚以提高稳定性,同时指出舵机不适合用于凿击并改为举升设计。在驱动芯片方面,对比了RZ7899和AT8236的性能,最终选择了后者以解决PWM频率问题。陀螺仪的减震设计也有助于提升稳定性。
没有什么是一次改版解决不了的,如果有那就改两次。
一、车体结构
底盘
之前用pcb做底板的版本已经被证明问题一大堆,太沉而且轴距过小,容易翻车;同时铲子太小,控不住人;此外陀螺仪直接做在底板上的设计不可取;不过第一代总是这样的,改进型号也要一点一点来。
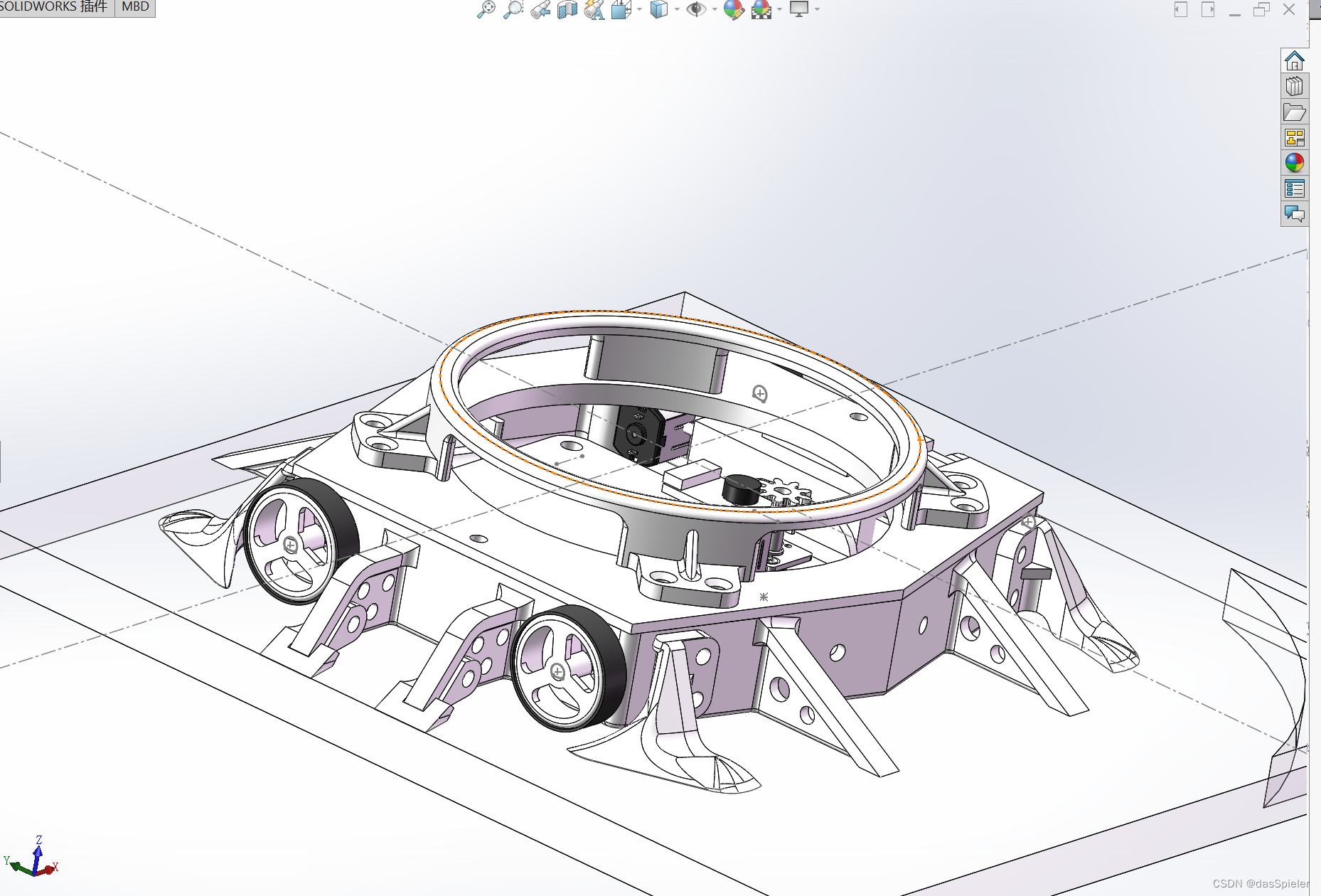
改版摒弃掉了pcb底板设计,老老实实用pla打印外壳。抛弃了pcb 10x10cm的限制,底盘可以做得很大,增加了稳定性。同时实验发现,tazbot的撑脚设计是有道理的,否则光凭借几个轮子的基底,完全无法满足举升的稳定性需要,还是会翻车。因为举升臂需要360°旋转,想要举升的时候不翻车,就需要满足当铲子插到别人下面去之后,自己和对面车的总重心落在自己的基底之内。因此在新版车上,四面八方都加上了撑脚,底盘尺寸达到了惊人的155x165mm,比同量级的车大整整一圈。底盘结构也从原来的pcb底板->立式轴承架变成了底盘车壳->顶盖->轴承架,顶盖正好压住行驶电机和电池。这么一合计,重量比原设计其实是要省一点的。
撑脚设计的时候最初考虑的是类似铰链叉的连接方式,做一排兼具铰链叉和撑脚功能的东西。从贴地考虑,那样子应该是可以保证贴地的。但是又想到万一叉子被别人扬了,整个举升功能也就废了,有一定风险。最后还是采用了这种刚性连接的撑脚,贴地就在撑脚下面加tpu叉子。试了一下撑脚效果还不错,可以直接掀翻250g重的袋装牛奶。
上层
实际实验的时候又发现,舵机其实不太适合拿来凿击的。因为舵机主要是位置控制,过大的减速比使得其很难发挥出凿击需要的速度,同时也限制了力矩控制的使用。舵机其实更合适拿来做切割的驱动,而不是挥击。而且为了更好的控制,把铲子改大了一倍,再带个锤子就很累赘了,所以干脆把锤子的部分去掉了,变成了纯举升。如果以后有需要改武器的话直接把举升臂换了就行了。
这么一改上层其实轻了不少,重量分布更加科学了。
主控板
控制板这下没那么多可用空间了,要压缩。听人推荐用了睿智微的RZ7899驱动芯片。这个芯片看数据性能很强悍,很难想象没有散热焊盘居然也能承受几十V的驱动电压,3~5A的电流。市面上不少玩具车驱动都用的是这玩意。
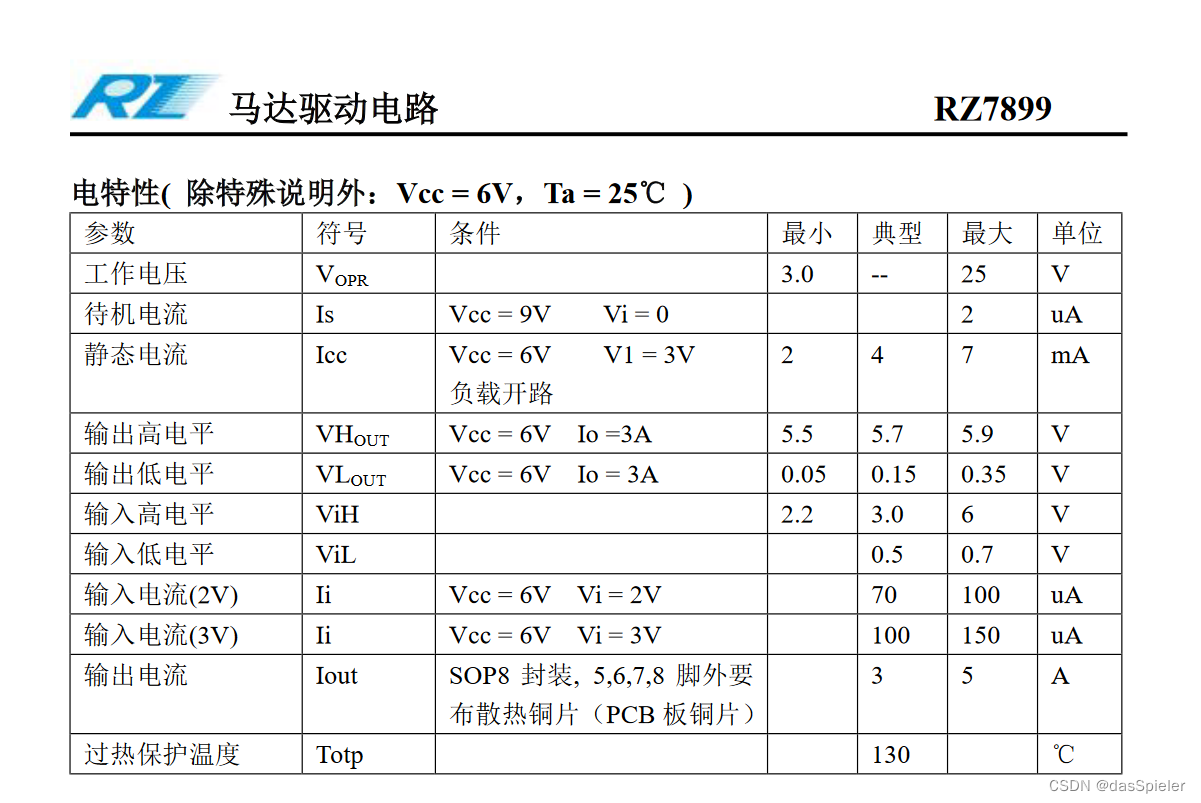
但是!手册上没有说的是!这玩意的pwm频率!最多只能1kHz!!!1kHz!!!!! 实际测试的时候用1k多一点点的pwm频率也是可以运行的,但是pwm频率一高控制就很奇怪了。应该是里面mos管死区时间太长,所以pwm频率到不了太高。但是1kHz也太扯了。。。线性也不好,根本没办法完成精确控制,而且频率低了电机会发出噪音,坑的要死。
当然一般玩具马达倒也够用了,只是拿来当舵机驱动芯片完全不够。spt舵机有奇怪的启动延时,所以干脆就自己做驱动了。只是没料到RZ芯片这么。。。烂。
换成中科微的AT8236就好多了,100k的pwm频率完全没有压力,数据上略弱于RZ7899但足够用了。比最一开始用的富满微的618cs好,也贵了不少。
陀螺仪的问题也解决了,加了减震,用的舵机的减震柱,固定在底盘上。车身里面走线还挺麻烦,空间太小了。
问题差不多就记录到这里。反正新版的车也不算完美,还有改进的空间的。底盘太低了,为了减重把车壳和顶盖都减的很薄,车身强度堪忧。想要增加强度的话只能缩减尺寸,整车的体积都要压缩。但这样的话内部的空间就更加紧张了,必须好好规划。

















 3085
3085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









