







目录
对应程序:12_freertos_example_sync_exclusion,基于05_freertos_example_createtask修改。
1. 同步与互斥的概念
一句话理解同步与互斥:我等你用完厕所,我再用厕所。
等,就是同步,让其步调一致。
厕所,就是互斥,同一时间只能让一个人使用。对于某些资源,同一时间只能有一个任务使用,他们必须独占的使用它,叫做互斥。
2. 同步的例子:有缺陷
任务2等待任务1的计算结果 flagCalcEnd , 自己不做什么事情,还在和任务1竞争cpu的资源,有点不应该。
虽然说这种同步资源的方式可取,但是太浪费cpu的资源了,大概消耗4s,运行结果 如图1。
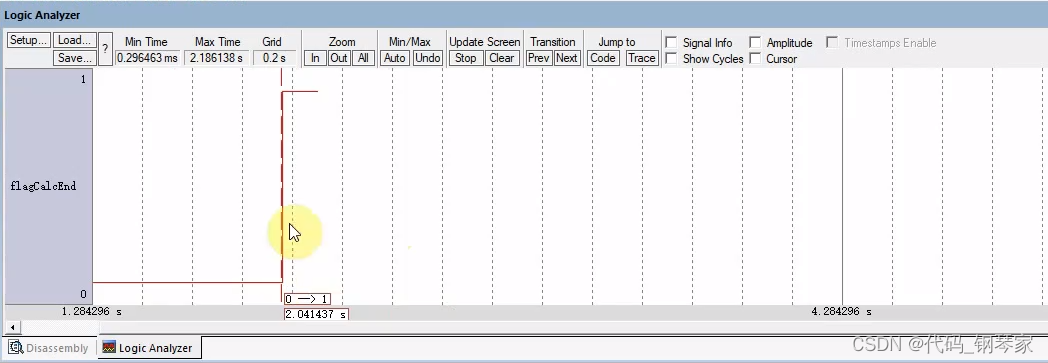
如果屏蔽掉任务2的创建,只用了2s ,运行结果 如图2。
/*-----------------------------------------------------------*/
static int sum = 0;
static volatile int flagCalcEnd = 0;
void Task1Function(void * param)
{
volatile int i = 0;
while (1)
{
for (i = 0; i < 10000000; i++)
sum++;
//printf("1");
flagCalcEnd = 1;
vTaskDelete(NULL);
}
}
void Task2Function(void * param)
{
while (1)
{
if (flagCalcEnd)
printf("sum = %d\r\n", sum);
}
}
/*-----------------------------------------------------------*/
int main( void )
{
TaskHandle_t xHandleTask1;
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello, world!\r\n");
xTaskCreate(Task1Function, "Task1", 100, NULL, 1, &xHandleTask1);
//xTaskCreate(Task2Function, "Task2", 100, NULL, 1, NULL);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}图1:运行结果:累计1000万次用了4s
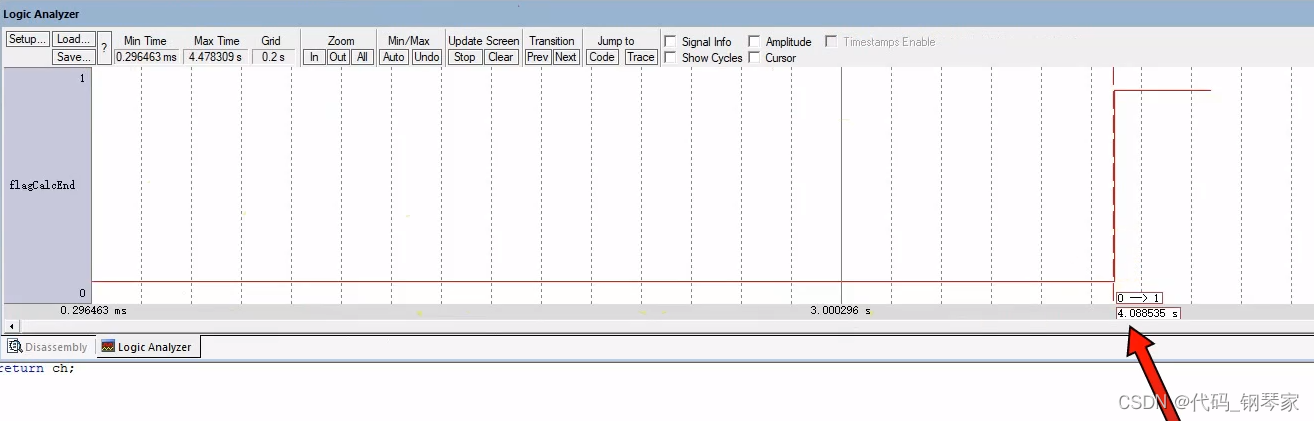
图2:如果屏蔽掉任务2的创建,只用了2s
如果让任务2运行,在它进入flagCalcEnd状态时,让它进入block状态,不让它去抢占cpu资源,这个代码的运行效率可以大幅提高。
上面用循环检测变量,来实现同步的方法,是有缺陷的,效率不高,太消耗cpu资源了。
3. 互斥的例子:有缺陷
使用串口互斥的打印信息。
在任务通用打印函数中TaskGenericFunction(),使用 flagUARTused 标志位,如果没有人使用窗口打印数据的时候,立马把 flagUARTused 标志位置为1,打印完信息后在置为0,在延时1ms,目的是让任务4可以完整打印出信息。
extern void vSetupTimerTest( void );
/*-----------------------------------------------------------*/
static int sum = 0;
static volatile int flagCalcEnd = 0;
static volatile int flagUARTused = 0;
void Task1Function(void * param)
{
volatile int i = 0;
while (1)
{
for (i = 0; i < 10000000; i++)
sum++;
//printf("1");
flagCalcEnd = 1;
vTaskDelete(NULL);
}
}
void Task2Function(void * param)
{
while (1)
{
if (flagCalcEnd)
printf("sum = %d\r\n", sum);
}
}
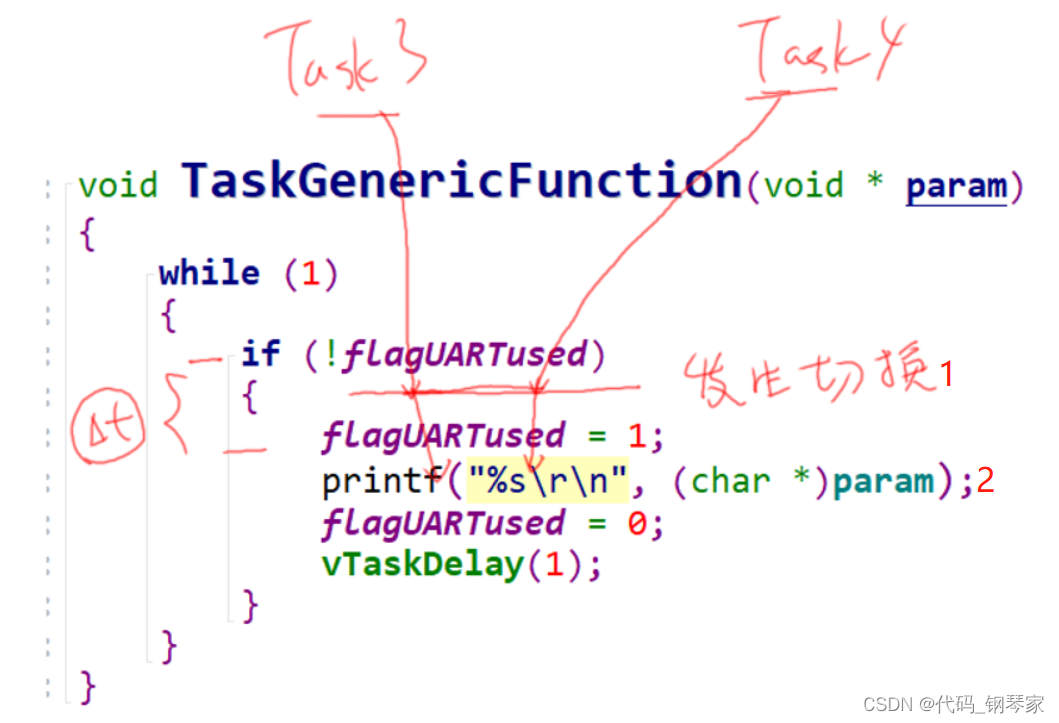
void TaskGenericFunction(void * param)
{
while (1)
{
if (!flagUARTused)
{
flagUARTused = 1;
printf("%s\r\n", (char *)param);
flagUARTused = 0;
vTaskDelay(1);
}
}
}
/*-----------------------------------------------------------*/
int main( void )
{
TaskHandle_t xHandleTask1;
#ifdef DEBUG
debug();
#endif
prvSetupHardware();
printf("Hello, world!\r\n");
xTaskCreate(Task1Function, "Task1", 100, NULL, 1, &xHandleTask1);
//xTaskCreate(Task2Function, "Task2", 100, NULL, 1, NULL);
xTaskCreate(TaskGenericFunction, "Task3", 100, "Task 3 is running", 1, NULL);
xTaskCreate(TaskGenericFunction, "Task4", 100, "Task 4 is running", 1, NULL);
/* Start the scheduler. */
vTaskStartScheduler();
/* Will only get here if there was not enough heap space to create the
idle task. */
return 0;
}运行结果:
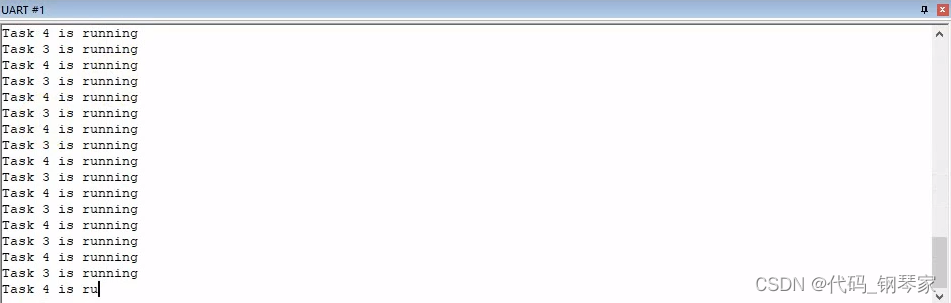
上述代码在运行过程中看似没有问题,但是在执行好几天,执行好几千万次的时候,总会碰到下面的情况,就会概率性的出现问题, 假设任务3、任务4都想使用这个串口,假如都执行到1处切换出去了,在这个时刻都没有把flagUARTused设置为1,任务4继续往下走,打印,这时候切换出去了,任务3继续往下走,它也可以打印,导致两个打印掺杂在一起。
所以在1时刻发生切换(调度)的话,就没有办法实现互斥的打印信息。
这段代码的问题是,判断和设置中间的∆t太长了,我们发现上述的几个列子,单纯使用全局变量来实现互斥,好像不大可靠。
4. 通信的例子:有缺陷
在freeRTOS中,可以使用全局变量来实现通信,比如,前面代码中全局变量static int sum = 0;
在任务1中实现计数之后,在任务2中就可以使用,这也是通过全局变量来实现通信,在freeRTOS多任务实现通信并不是很复杂,复杂的是如何实现同步和互斥,后续继续学习freeRTOS同步和互斥的解决方案。
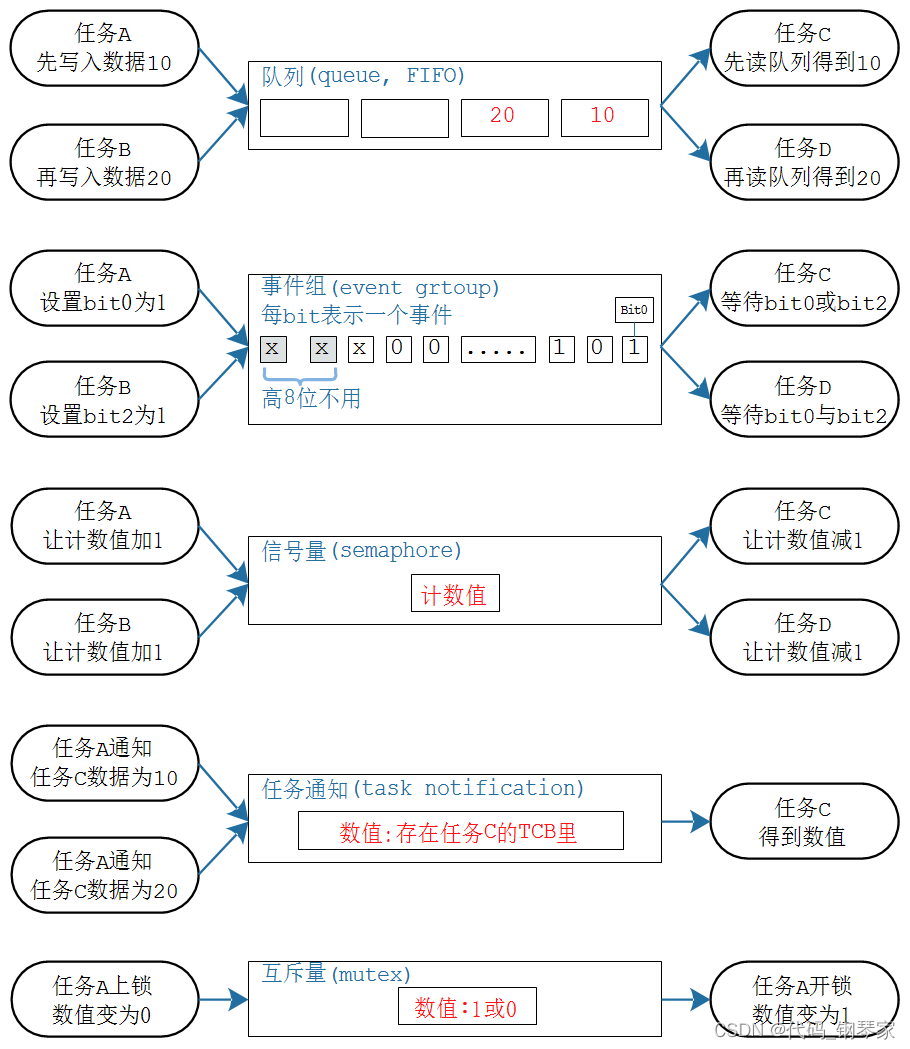
5. FreeRTOS的解决方案
-
正确性
-
效率:等待者要进入阻塞状态
-
多种解决方案















 4255
4255











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









