







 这篇博客详细介绍了六维空间向量在描述刚体运动和力的应用,包括运动和力的六维表示、加法运算、模乘、点积、坐标变换、叉积、微分、加速度、空间动量、空间惯量以及空间运动方程。通过六维向量,可以更深入地理解和分析刚体的动态行为。
这篇博客详细介绍了六维空间向量在描述刚体运动和力的应用,包括运动和力的六维表示、加法运算、模乘、点积、坐标变换、叉积、微分、加速度、空间动量、空间惯量以及空间运动方程。通过六维向量,可以更深入地理解和分析刚体的动态行为。
六维空间向量表示法目录
目前对机器人动力学还没有一套标准的表示法,比如有3D向量、齐次矩阵、六维空间向量等。其中最有效的是六维空间向量( Spatial Vector Notation),本文是我看《Handbook of robotics》的笔记,其中看起来弯弯曲曲的字母 v f v f vf表示3维向量,看起来直直的v f 表示六维空间向量。
1、运动和力
为了区分刚体的运动(motion)和施加在刚体上的力(force),分别用运动六维向量空间 M 6 M^6 M6和力六维向量空间 F 6 F^6 F6来表示。两个空间及其各自的基向量如下图所示
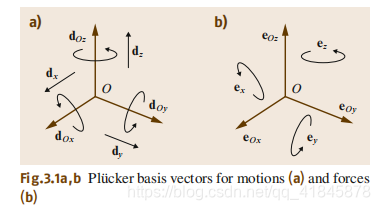
两个空间共有12个基向量,6个用来描述运动,6个用来描述力。
在运动六维空间,对于一个坐标系 O x y z O_{xyz} Oxyz,三个描述分别绕坐标轴 O x O_x Ox, O y O_y Oy, O z O_z Oz进行旋转的基向量 d O x d_{Ox} dOx, d O y d_{Oy} dOy, d O z d_{Oz} dOz;三个描述分别沿着坐标轴 O x O_x Ox, O y O_y Oy, O z O_z Oz进行平移的基向量 d x d_{x} dx, d y d_{y} dy, d z d_{z} dz。
在力六维空间,对于一个坐标系 O x y z O_{xyz} Oxyz,三个描述分别绕坐标轴 O x O_x Ox, O y O_y Oy, O z O_z Oz进行旋转的基向量 e O x e_{Ox} eOx, e O y e_{Oy}
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









