









一、引言
三维重建是计算机视觉与图形学中的重要研究领域,它致力于将真实世界的物体或场景通过计算机技术重建为数字三维模型。这项技术在医学成像、城市规划、文化遗产保护、增强现实和虚拟现实等众多领域有着广泛应用。本文将全面介绍三维重建技术的基本原理、主要工作流程、代表性方法、应用场景以及面临的挑战与未来发展趋势。
二、三维重建的基本概念
三维重建本质上是一个逆向工程过程,旨在从二维图像或其他感知数据中恢复三维物体的几何和外观信息。从数学角度看,它是一个从低维空间到高维空间的映射问题,需要解决的关键挑战是如何从有限的观测数据中推断出完整的三维结构。
三维重建的核心目标包括:
- 几何重建:恢复物体或场景的三维形状和空间结构
- 外观重建:重现物体表面的颜色、材质和光照特性
- 语义理解:识别和分类场景中的物体及其关系
三、三维重建的一般工作流程
三维重建通常遵循一个标准化的工作流程,每个阶段都有其特定的技术方法和挑战:
3.1 数据采集阶段
这是三维重建的起点,涉及获取用于重建的原始数据。
代表方法:
- 多视角图像采集:使用单个或多个相机从不同角度拍摄目标物体或场景
- 结构光扫描:投射特定模式的光线到物体表面并分析变形
- 激光扫描:使用LiDAR等设备发射激光并测量反射时间
- RGB-D相机采集:同时获取彩色图像和深度信息
案例举例:
在故宫紫禁城的数字化项目中,研究团队使用了高精度激光扫描仪结合专业摄影设备,从上百个角度采集了太和殿的点云数据和高清纹理图像。激光扫描仪以毫米级精度捕捉了建筑结构的几何细节,而专业相机则记录了彩绘、雕刻等表面细节的纹理信息。
3.2 预处理阶段
原始数据通常需要经过清洗和优化才能用于后续重建。
代表方法:
- 噪声过滤:去除异常点和噪声数据
- 数据对齐:将来自不同视角或传感器的数据对齐到同一坐标系
- 图像增强:调整亮度、对比度和锐度以提高图像质量
- 特征点提取:从图像中提取SIFT、SURF或ORB等特征点
案例举例:
在医学CT扫描数据处理中,原始数据常常包含由于患者微小移动或设备噪声产生的伪影。预处理阶段会应用高斯滤波等技术去除噪声,并使用直方图均衡化增强组织边界对比度。对于肺部CT重建,还会应用特定阈值分割算法以更好地区分肺组织和其他结构。
3.3 相机位姿估计/配准阶段
确定不同视角下的相机或传感器的位置和方向,建立统一的空间参考系。
代表方法:
- 结构运动(Structure from Motion, SfM):从特征点匹配恢复相机位姿和稀疏三维结构
- 视觉同步定位与地图构建(SLAM):实时估计相机位置并构建环境地图
- 迭代最近点(ICP)算法:用于点云数据的配准
- 特征匹配与RANSAC:剔除错误匹配并估计变换矩阵
案例举例:
谷歌的街景服务使用SfM技术处理采集车拍摄的连续图像。通过SIFT特征提取和匹配,结合GPS和IMU数据,系统能够精确确定每张图像的拍摄位置和朝向。在城市环境中,系统需要处理重复纹理(如相似的窗户和道路)带来的匹配挑战,这时RANSAC算法能有效剔除错误匹配,提高位姿估计准确性。
3.4 密集重建阶段
基于已知的相机位姿,生成密集的三维表示(点云、网格或体素)。
代表方法:
- 多视图立体(MVS):如PMVS、CMVS等算法
- 基于深度图融合:将多个深度图融合为统一的三维表示
- 基于体素的空间雕刻:从多个轮廓确定物体形状
- 神经隐式表示:如NeRF、IDR等神经网络方法
案例举例:
在文物数字化中,北京故宫博物院对青铜"司母戊鼎"进行了高精度三维重建。研究人员使用MVS算法从数百张高分辨率照片中重建了初始点云。面对青铜器表面复杂的纹理和反光材质带来的挑战,团队采用了特殊的偏振滤光拍摄技术消除反光,并使用Screened
Poisson Surface Reconstruction算法将点云转换为精细网格模型,成功重现了鼎身上精细的兽面纹和饕餮纹。
4.5 表面重建阶段
将点云数据转换为连续的表面表示,通常是三角网格。
代表方法:
- 泊松表面重建:利用点云的法向量信息重建表面
- 马尔奇立方(Marching Cubes):从体素表示转换为网格表面
- 德劳内三角剖分:基于点集的三角化方法
- α形状(Alpha Shapes):控制重建表面的细节水平
案例举例:
在考古领域,土耳其以弗所古城的数字重建项目中,考古学家面临的挑战是从不完整的遗址残片重建完整的建筑结构。研究团队先使用激光扫描获取高密度点云,再应用改进的泊松表面重建算法处理数据。该算法特别优化了对不完整数据的处理能力,能够从部分损坏的柱础、墙体等残片中推断出完整的结构形状,并生成连续平滑的表面模型。随后,考古学家可以基于这些模型进行虚拟复原和学术研究。
4.6 纹理映射阶段
将图像信息映射到几何模型上,赋予模型真实的外观。
代表方法:
- 参数化与展UV:将三维表面映射到二维平面
- 多视角纹理融合:从多个图像中选择或融合最佳纹理
- 光照分解与材质估计:分离物体固有色和环境光照
- 基于物理的渲染(PBR)材质重建:估计反射率、粗糙度等参数
案例举例:
电影《阿凡达》中的角色创建使用了先进的纹理映射技术。演员脸部被安装了特制的相机阵列,从多个角度同时捕捉面部表情和纹理细节。在纹理映射阶段,系统使用光照分解算法分离皮肤的反射特性和环境光照,然后应用多频段纹理混合技术,将不同尺度的纹理细节(从大尺度的面部结构到微小的毛孔和细纹)分别处理和映射。这种多层次纹理映射方法使得虚拟角色在特写镜头下仍然保持高度真实感。
4.7 优化与后处理阶段
提高模型质量,修复缺陷,简化模型以适应不同应用需求。
代表方法:
- 网格简化:减少模型面数以适应实时渲染
- 孔洞填充:修复重建中的缺失区域
- 细节增强:通过法线贴图等技术增加表面细节
- 全局一致性优化:确保整个模型的几何和外观一致性
案例举例:
在游戏开发中,《最后生还者2》的环境艺术团队从真实城市环境的三维扫描数据开始,生成了初始的高精度模型。这些模型通常包含数百万个多边形,无法在游戏引擎中实时渲染。在后处理阶段,艺术家使用四元网格简化(Quadratic Edge Collapse Decimation)算法将网格面数减少到原来的5%,同时保留关键的视觉特征。然后使用法线贴图和环境光遮蔽贴图烘焙技术,将高多边形模型的细节信息转移到低多边形模型上。这种方法使游戏场景在保持视觉质量的同时,能够在主机平台上流畅运行。
五、主要技术方法详解
5.1 基于图像的三维重建
这是最常见的三维重建方法,利用多个角度拍摄的二维图像来重建三维模型。
结构光方法:通过投影已知模式的光(通常是条纹图案)到物体表面,然后分析这些模式的变形来计算三维形状。例如,苹果的Face ID使用的就是这种技术。结构光方法的优势在于速度快、精度高,但需要特殊的硬件设备。
多视图立体视觉(MVS):利用从不同视角拍摄的多张图像,通过对应点匹配和三角测量来恢复三维结构。这一方法的核心挑战是如何在不同视角下找到同一点的对应关系。MVS通常包含以下步骤:
- 特征点提取与匹配
- 相机位姿估计(通过结构运动算法SfM)
- 密集点云生成
- 表面重建与纹理映射
单目深度估计:利用深度学习技术从单张图像中预测深度信息。这一方法近年来取得了显著进展,尽管精度不如多视图方法,但在许多应用场景中已经足够有效。如MiDaS和DPT等网络模型可以从单张图像中估计出较为准确的相对深度图,为快速三维建模提供了可能。
5.2 基于深度传感器的三维重建
RGB-D重建:结合RGB彩色图像和深度图像进行三维重建。Kinect等深度相机可以直接获取场景的深度信息,简化了重建过程。KinectFusion就是一个经典的基于RGB-D的实时三维重建系统,它能够在用户手持深度相机移动时,实时融合深度图并构建场景的体素表示。
激光雷达(LiDAR)重建:通过发射激光并测量反射时间来获取点云数据。LiDAR技术在大尺度场景如城市建筑、考古遗址等的三维重建中有着显著优势。例如,苹果iPad Pro搭载的LiDAR传感器使普通用户也能进行房间级别的三维扫描和重建。
5.3 基于神经网络的三维重建
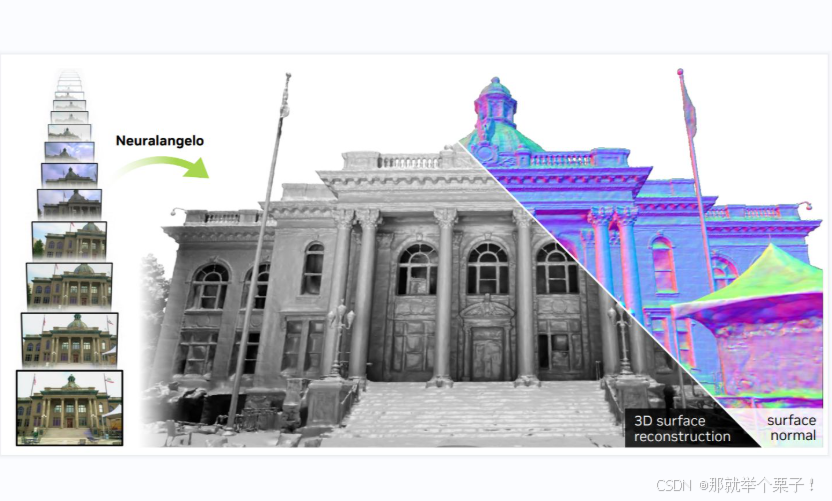
神经辐射场(NeRF):这是近年来最具革命性的三维重建技术之一。NeRF将三维场景表示为一个连续的5D函数(空间坐标x,y,z和视角方向θ,φ),通过神经网络学习场景的体积密度和颜色。NeRF能够产生高质量的新视角渲染,并隐式地表示复杂的三维几何结构。谷歌研究团队提出的Instant NGP等改进模型大大提高了训练和渲染速度,使得实时交互成为可能。
隐式表面重建:使用神经网络学习物体的符号距离函数(SDF)或占用场(Occupancy Field),能够表示复杂的形状并支持高分辨率的几何重建。DeepSDF和Occupancy Networks是这一领域的代表性工作,它们能够从不完整的点云数据中学习完整的形状表示。
单图像到三维(Image-to-3D):最新的研究如DreamFusion和Magic3D能够从单张图像甚至文字描述生成三维模型。这些方法结合了大型语言模型、扩散模型和三维表示学习,开创了三维内容创建的新范式。
六、三维重建的数学基础
理解三维重建的实质,需要掌握其背后的数学原理:
相机模型:透视投影是三维重建的基础,针孔相机模型描述了三维点如何投影到二维图像平面。相机标定则是确定相机内参(焦距、主点坐标等)和外参(相机位置和方向)的过程。
对极几何:描述了两个视角之间的几何关系,是多视图立体视觉的理论基础。基础矩阵(Fundamental Matrix)和本质矩阵(Essential Matrix)是对极几何的数学表示。
三角测量:已知一个三维点在多个图像中的投影位置,以及相机参数,可以通过三角测量恢复该点的三维坐标。
光度立体视觉:利用不同光照条件下的图像来估计表面法向量,进而重建三维形状。其基础是反射模型,如Lambertian反射模型。
七、三维重建的行业应用案例
7.1 医学领域
影像诊断辅助系统:医学影像三维重建技术能将CT、MRI等二维切片数据重建为三维模型,帮助医生更直观地理解患者的解剖结构。
案例举例:
上海交通大学附属瑞金医院的肝脏手术规划系统使用了先进的医学影像三维重建技术。系统首先从患者的多期CT扫描数据中,使用基于深度学习的多器官分割算法自动提取肝脏、血管和肿瘤区域。然后应用自适应网格生成算法构建高精度的肝脏解剖模型,特别是精确重建了复杂的肝内血管网络。外科医生可以通过VR设备与模型交互,模拟不同的切除方案,系统会实时计算剩余肝脏体积和功能血管灌注区域,帮助医生制定最佳手术方案。在一项涉及50例复杂肝癌病例的研究中,使用该系统的手术组相比传统组,平均手术时间缩短了46分钟,术中出血量减少了约200ml。
7.2 文化遗产保护
数字化保存与虚拟复原:对濒危或已损毁的文化遗产进行三维扫描和重建,为后代保存珍贵历史信息。
案例举例:
英国大英博物馆与谷歌艺术与文化项目合作,对帕特农神庙的大理石雕像进行了超高精度三维重建。团队使用了结构光扫描与摄影测量相结合的方法,捕捉了雕像表面微米级的细节。特别是对于已经风化的表面,研究人员使用了计算摄影学中的反射变换成像(RTI)技术,通过不同角度的光照捕捉微小表面起伏。在后处理阶段,应用了专门开发的算法来区分原始雕刻痕迹与后期风化损伤,这些信息被编码到三维模型的不同通道中。这种多层信息的三维重建不仅保存了文物的当前状态,还为考古学家提供了分析工具,帮助理解雕像的原始状态和历史变迁过程。
7.3 工业制造与质量控制
逆向工程与产品设计:通过扫描实物原型快速获取CAD模型,大幅缩短产品迭代周期。
案例举例:
德国宝马汽车公司在新车型开发过程中广泛应用三维重建技术。设计师首先创建粘土模型表达设计理念,然后使用工业级三维扫描仪对模型进行扫描。扫描数据经过处理后生成精确的CAD模型,工程师可以直接基于这些模型进行空气动力学分析和结构优化。对于复杂的内饰件,宝马使用手持结构光扫描仪和专用的图像纹理采集系统,不仅捕捉几何形状,还记录材质的反射特性。这种从实物到数字模型的流程使设计和工程部门能够更紧密地协作,在2022款7系列开发中,宝马报告称这一工作流程比传统方法节省了约3个月的开发时间。
7.4 增强现实与虚拟现实
实时环境理解与交互:AR应用需要快速理解周围环境的三维结构,以便将虚拟内容与现实世界正确融合。
案例举例:
微软HoloLens
2在其AR系统中集成了先进的实时三维重建技术。设备前端的深度传感器不断扫描用户周围环境,通过改进的KinectFusion算法实时构建空间映射网格。特别创新的是,系统采用了"渐进式细化"策略——初始重建快速生成粗糙模型以实现即时交互,随后在后台持续优化模型细节。HoloLens还使用基于深度学习的语义分割算法识别墙壁、地板、桌面等常见物体,提升虚拟对象与现实环境的交互逻辑。例如,在建筑可视化应用中,系统能够自动识别会议桌面,将虚拟建筑模型放置在桌面上,并正确处理遮挡关系,如虚拟建筑被真实物体遮挡时的渲染效果。
八、三维重建的关键挑战
- 稀疏数据重建:如何从有限的观测数据中重建完整的三维模型是一个持续挑战。
- 纹理与材质恢复:几何重建只是第一步,如何准确重现物体的外观特性同样重要。
- 大规模场景重建:当面对城市级别的场景时,计算复杂度和数据管理是巨大挑战。
- 动态场景重建:对于运动物体或变化场景的重建,需要考虑时间维度的信息。
- 实时性要求:许多应用(如AR/VR)需要实时或近实时的三维重建能力。
九、三维重建技术的最新进展
- 神经体绘制技术:如NeRF及其变体(如Instant-NGP、Mip-NeRF等)大大提高了三维场景重建和新视角合成的质量和效率。
- 扩散模型:利用扩散模型生成三维结构,如DreamFusion等技术可以从文本描述生成三维模型。
- 基础模型:大规模预训练的三维基础模型(如Point-BERT)提高了点云处理和三维理解的能力。
- 多模态融合:结合RGB图像、深度信息、语义标签等多种模态的信息进行更全面的三维重建。
示例应用:
谷歌研究团队开发的"Immersive View"功能集成了最新的神经渲染和多模态三维重建技术。系统首先融合来自街景车辆、航拍图像和用户上传照片的多源数据,创建初始的城市几何模型。然后应用改进的NeRF技术对场景进行神经重建,特别是处理阳光、阴影等光照变化,甚至可以模拟不同时间的光照效果。系统还融合了语义理解能力,自动识别建筑、树木、道路等元素,并应用特定的渲染和交互行为。用户可以在虚拟环境中自由漫游,系统会按需加载和渲染视野范围内的内容,并根据用户位置动态调整模型精度,确保流畅体验。这项技术目前已在谷歌地图中的部分城市推出,提供了前所未有的沉浸式导航体验。
十、面临的挑战与未来趋势
计算效率:尽管神经渲染技术提供了高质量的结果,但其计算成本仍然很高。未来需要更高效的算法和硬件加速。
完整性与准确性:如何处理反射面、透明物体和复杂光照等难题仍是研究热点。
大规模与精细化并存:同时满足大场景(如整个城市)和精细细节(如建筑装饰)的重建需求。
语义理解与高层表示:从纯几何重建向场景理解过渡,包含物体识别、关系理解等高级语义信息。
实时与交互性:面向AR/VR等应用的低延迟、高交互性三维重建技术。
可编辑性与生成能力:未来的三维重建不仅是复制现实,还需要支持直观的编辑和基于现有数据的新内容生成。
十一、结论
三维重建技术作为连接物理世界和数字世界的桥梁,正在经历从传统计算机视觉方法到深度学习驱动的快速发展。它的核心实质是从有限的低维观测数据中推断并恢复高维的三维结构信息。理解三维重建的数学基础、工作流程、技术方法和应用场景,对于研究人员开展相关工作具有重要意义。
三维重建技术的工作流程从数据采集、预处理、位姿估计、密集重建、表面重建到纹理映射和优化,构成了一个完整的技术体系。在每个阶段都有针对不同应用场景的专门方法和算法,研究人员可以根据具体需求选择合适的技术路线。
随着计算能力的提升和新算法的不断涌现,三维重建技术将变得更加精确、高效和普及,在更广泛的领域发挥作用。未来,三维重建技术将朝着更智能、更自动化、更精细的方向发展


















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









