







文章目录
前言
Autosar CAN模块主要分为五个部分:
CAN Driver:MCU硬件CAN控制器驱动;
CAN Interface : 硬件统一抽象接口;
CANTP : 处理诊断报文;
CANSM :控制CAN控制器,收发器状态;
CANNM : CAN网络管理模块;
各模块之间通过标准API接口互相调用,通过PDU传递数据。
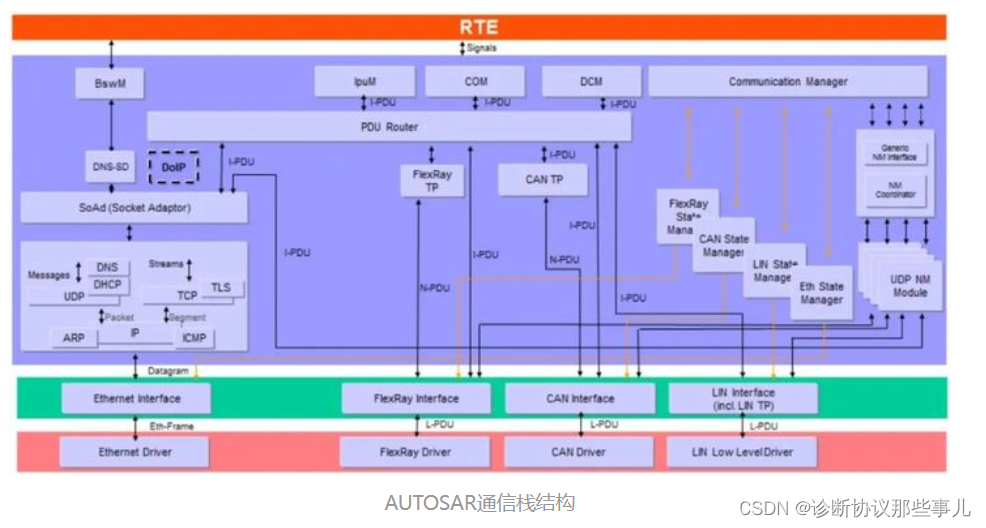
以基本的CAN通信为例,其发送机制为RTE–>COM–>PduR–>CanIf–>CAN Driver,过程描述如下:
Com模块获取应用层的信号(Signal),经一定处理封装为I-PDU(Interaction Layer Protocol Data Unit)发送到PduR模块;
PduR模块路由协议中所指定的I-PDU目标接收模块,将接收到的I-PDU经一定处理后发送给CanIf;
CanIf将信号以L-PDU(Data Link Layer Protocol Data Unit)的形式发送给CAN驱动模块
一、CAN 驱动
主要功能
• 为上层模块提供发送接口,发送确认接口,接收接口<

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 2988
2988











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











