







 超级会员免费看
超级会员免费看
 本文详细介绍了R3LIVE框架,包括其组成部分——激光惯性里程计(LIO)和视觉惯性里程计(VIO)。R3LIVE基于FAST-LIO构建地图几何结构,并通过VIO融合视觉数据进行地图纹理渲染。文中还阐述了R3LIVE的launch文件结构和配置文件设置,特别是针对不同雷达类型和相机参数的调整。此外,指出了阅读源码的关键起点是r3live_LiDAR_front_end节点。
本文详细介绍了R3LIVE框架,包括其组成部分——激光惯性里程计(LIO)和视觉惯性里程计(VIO)。R3LIVE基于FAST-LIO构建地图几何结构,并通过VIO融合视觉数据进行地图纹理渲染。文中还阐述了R3LIVE的launch文件结构和配置文件设置,特别是针对不同雷达类型和相机参数的调整。此外,指出了阅读源码的关键起点是r3live_LiDAR_front_end节点。
目录
1 R3LIVE框架简介
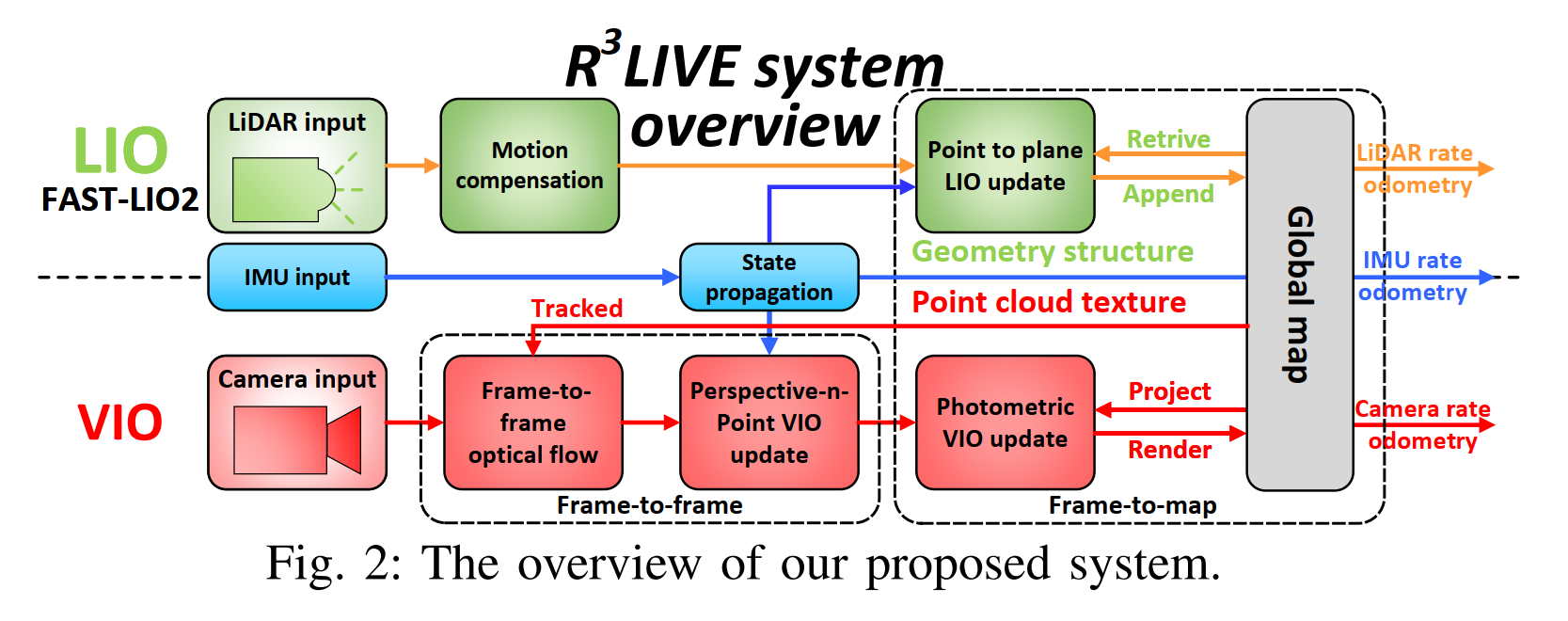
R3LIVE是香港大学Mars实验室提出的一种融合imu、相机、激光的SLAM方法,R3LIVE由两个子系统组成,一个激光惯性里程计(LIO)和一个视觉惯性里程计(VIO)。LIO子系统(FAST-LIO)利用来自激光雷达和惯性传感器的测量数据,并且构建地图的几何结构(即3D点位置)。VIO子系统使用视觉惯性传感器的数据,并且渲染地图的纹理(即3D点颜色)。更具体而言,VIO子系统通过最小化帧到地图的光度误差直接且有效地融合视觉数据。本文所提出的系统R3LIVE是基于我们之前的工作R2LIVE开发的,它的VIO架构设计与R2LIVE完全不同。
2 R3LIVE的launch文件
在R3LIVE中我们可以看到有这三个launch文件,r3live_bag.la

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 3531
3531

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











