






替导师的实验课程写了一套R3LIVE基于Ubuntu20.04的实验指导书,因为是写给本科生用的,所以写的非常详细和入门,发在这里分享一下,如果有用请记得点赞收藏评论。
R3Live编译运行
1.1 安装ROS
1、添加ROS软件源
将下面这条命令复制到ubuntu的终端执行
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'2、添加密钥
将以下命令复制到ubuntu的终端执行
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654显示如下画面:
3、更新软件源
将以下命令复制到ubuntu的终端执行(如果用wifi更新慢或者失败的话,切换至手机热点,再执行下面的命令试一下)
sudo apt update成功后会显示如下界面:
4、配置及更换最佳软件源
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
5、安装ROS
因ubuntu版本的不同其安装指令也有可能不同, ubuntu20.04 执行下面的命令来安装:
sudo apt install ros-noetic-desktop-full安装完成
6、初始化rosdep
输入以下命令
sudo apt install python-rosdep2 或
sudo apt install python3-rosdep2这时候它会出现以下的界面,输入Y继续

输入以下的命令,先对其初始化
sudo rosdep init7、设置环境变量
输入下面的这行代码, ubuntu是20.04版本的,对应的是noetic,也就是应该下面的这行代码
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc输入以下命令,运行该脚本让环境变量生效
source ~/.bashrc8、 安装rosinstall
输入以下命令:
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool9、 验证ROS是否安装成功
输入以下命令:
Roscore
根据提示输入以下命令:
sudo apt install python3-roslaunch
再次输入命令:
roscore出现以下错误,说明之前并没有安装全
输入以下命令,把没安装的安装一下就好了
sudo apt install ros-noetic-desktop-full10、启动小海龟程序,验证安装成果
按ctrl+alt+t打开一个新的终端,输入以下命令:
roscore按ctrl+alt+t打开一个新的终端,输入以下命令:
rosrun turtlesim turtlesim_node按ctrl+alt+t打开一个新的终端,输入以下命令,并且点选此窗口:
rosrun turtlesim turtle_teleop_key这时候你按键盘上的↑↓←→键就可以控制小海龟移动了
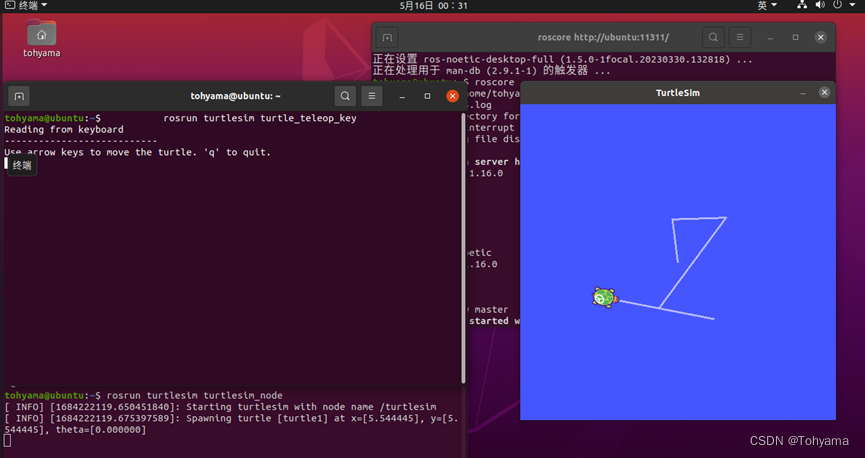
至此,ROS已经安装成功了。
1.2 安装Livox驱动程序
1、运行览沃 ROS 驱动程序之前,必须安装 ROS 和 Livox-SDK。
解压文件,进入Livox-SDK-master文件夹,右键后选择在终端打开:
依次输入以下每一行指令:
cd build && cmake ..
make
sudo make install第三行代码会要求输入密码,完成后显示如下页面:
Livox-sdk安装完成
2、安装livox-ros-driver
完成Livox-sdk安装后,在主文件夹会生成ws_livox文件夹
新建src文件夹,并且把解压后的livox-ros-driver-master文件(这个文件发布者貌似发布了几个不同的版本,大家根据需求自行选择)放入其中
直接打开终端,依次输入以下命令:
cd ws_livoxcatkin_make
使用如下命令更新当前 ROS 包环境
source ./devel/setup.sh1.3 安装OpenCV
sudo apt updatesudo apt install libopencv-dev python3-opencv查看安装的opencv版本:
pkg-config --modversion opencv1.4 安装VTK
1.先安装x11
sudo apt-get install libx11-dev libxext-dev libxtst-dev libxrender-dev libxmu-dev libxmuu-dev2.进入VTK-7.1.1文件夹,点击右键后左键选择“在终端打开”
3.然后在终端中逐行输入以下命令:
mkdir build
cd build
cmake ..make -j4(j4表示4线程,电脑配置足够好的话可以修改)
sudo make install
1.5安装PCL
1.首先安装各种依赖项:
sudo apt-get update
sudo apt-get install git build-essential linux-libc-devsudo apt-get install cmake cmake-guisudo apt-get install libusb-1.0-0-dev libusb-dev libudev-devsudo apt-get install mpi-default-dev openmpi-bin openmpi-commonsudo apt-get install libflann1.9 libflann-dev # ubuntu20.4对应1.9sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libqhull* libgtest-devsudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-completesudo apt-get install libopenni-dev
sudo apt-get install libopenni2-dev
2.输入以下指令安装PCL:
sudo apt install libpcl-dev3.PCL安装完成
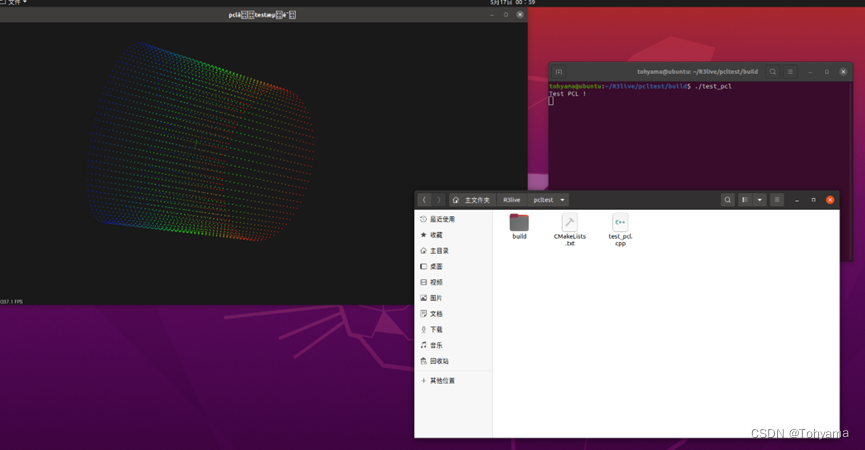
4.验证PCL是否安装完成
参考链接,运行成功时页面如下:
1.6安装eigen3和Ceres
1.Eigen3可以使用以下命令进行安装:
sudo apt-get install libeigen3-devEigen3安装完成
2.指令添加镜像源到sources.list
sudo add-apt-repository "deb http://archive.ubuntu.com/ubuntu/ trusty main universe restricted multiverse" -u3.安装依赖:
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3.1.2 libgflags-dev libgoogle-glog-dev libgtest-dev4.安装Ceres,过程同安装VTK:
cd ceres-solver
mkdir build
cd build
cmake ..make -j8sudo make install
1.7编译R3Live
1.创建ros工作空间:
mkdir -p r3live/src2.克隆代码,把r3live-master和livox_ros_driver文件放在src文件夹的对应位置
3.然后输入如下指令:
cd ../
catkin_makesource devel/setup.bash1.8运行R3live
1.输入:
roslaunch r3live r3live_bag.launch系统会自动打开RViz窗口
2.在存放文件包的目录打开命令窗口,输入:
rosbag play 包的名字.bag3.成功运行程序:
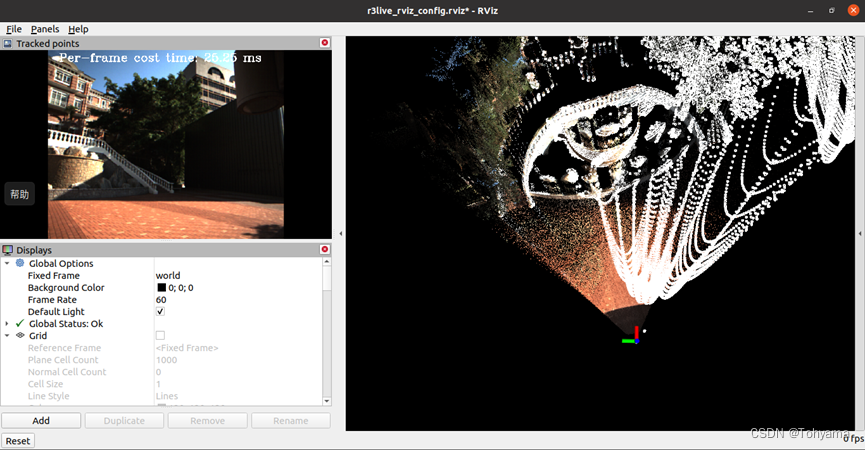
如果窗口闪退或者不显示点云文件
关闭虚拟机的3D图形加速功能,步骤如下:
关闭虚拟机,虚拟机-设置-显示器-加速3D图形,再打开虚拟机
















 4501
4501











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









