






一. Nuitrack安装
-
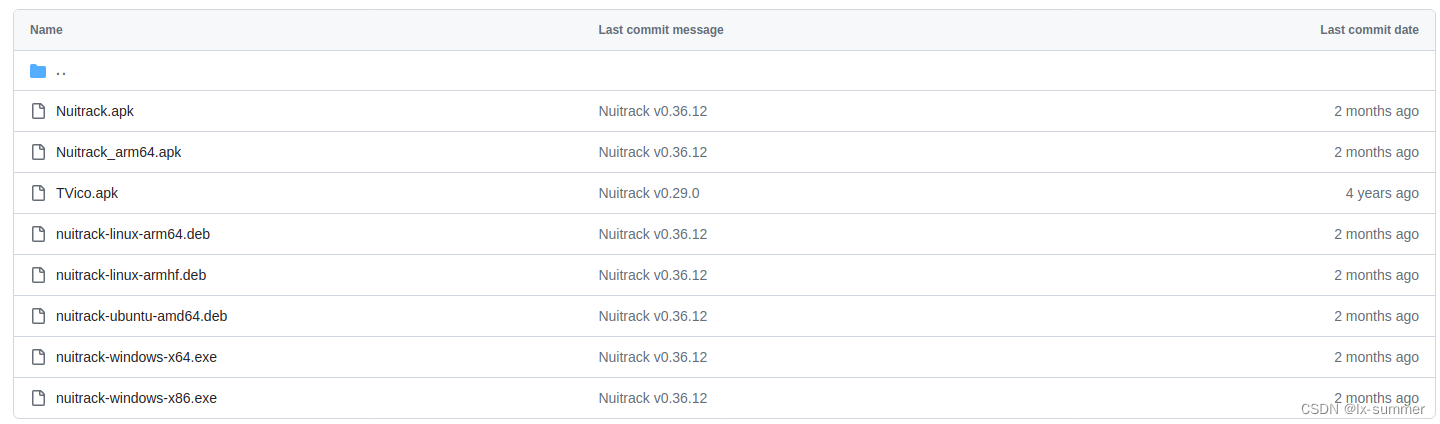
下载 Nuitrack 安装包
根据平台需求,下载对应的安装包:
-
安装Nuitrack
# Remove OpenNI - it conflicts with the version supplied by Nuitrack! sudo apt-get purge --auto-remove openni-utils sudo dpkg -i nuitrack-ubuntu-amd64.deb sudo reboot -
获取秘钥,并进行测试
-
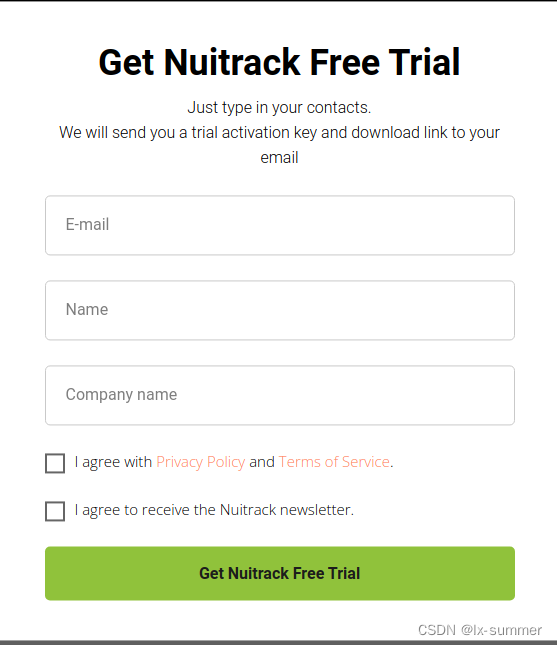
获取激活秘钥:
-
打开许可工具,输入秘钥,进行激活
nuitrack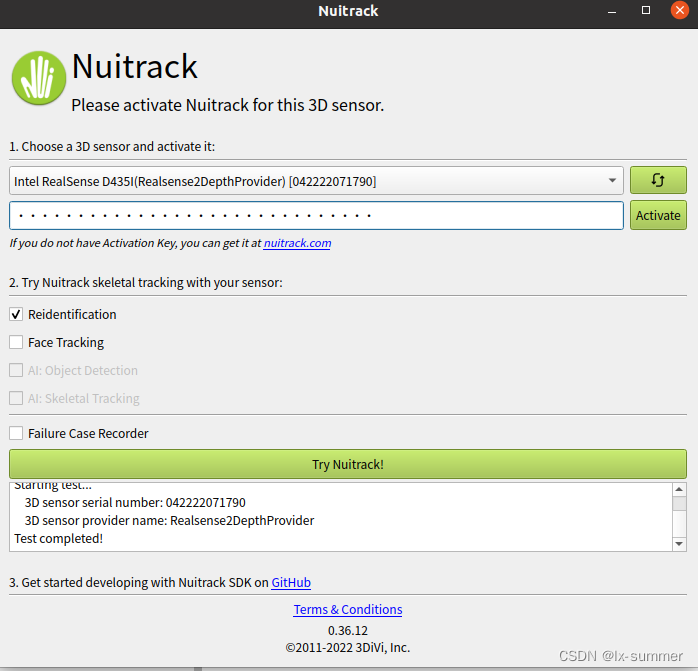
-
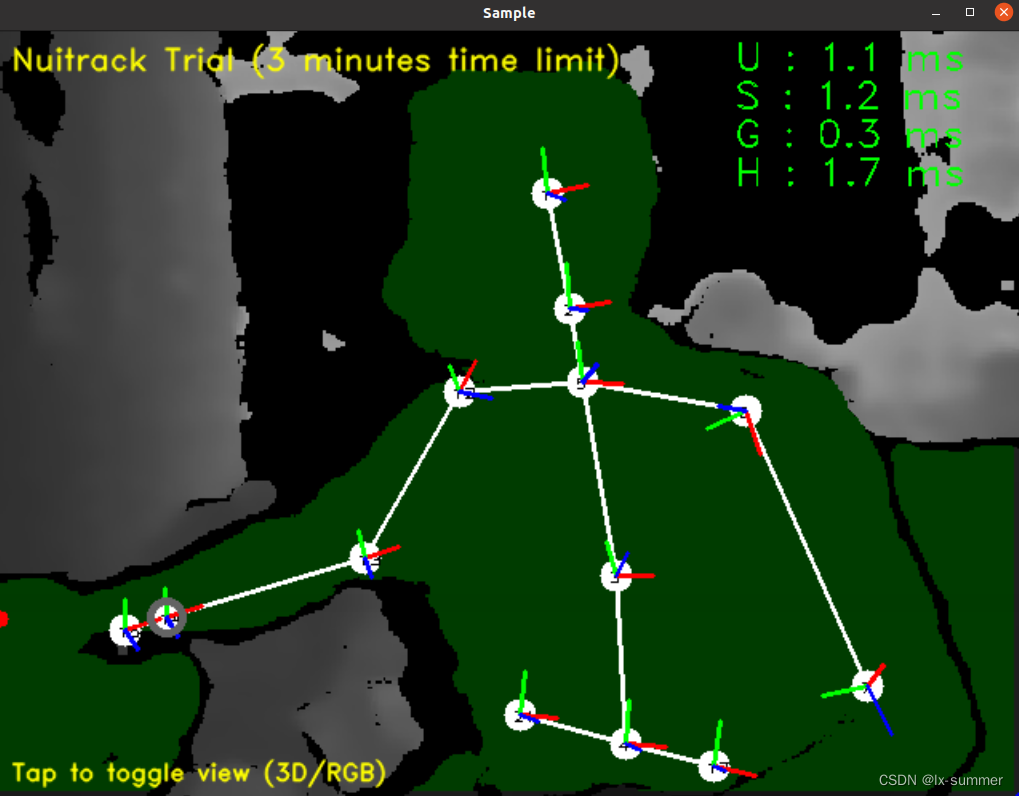
连接相机,并测试
二、 安装ROS包
有以下两个可用的ROS包(注意免费的 Nuitrack,限时3分钟,不过可以设置自动重启)
-
nuitrack_ros:可用
git clone https://github.com/byeongkyu/nuitrack_ros.git roslaunch nuitrack_ros nuitrack.launch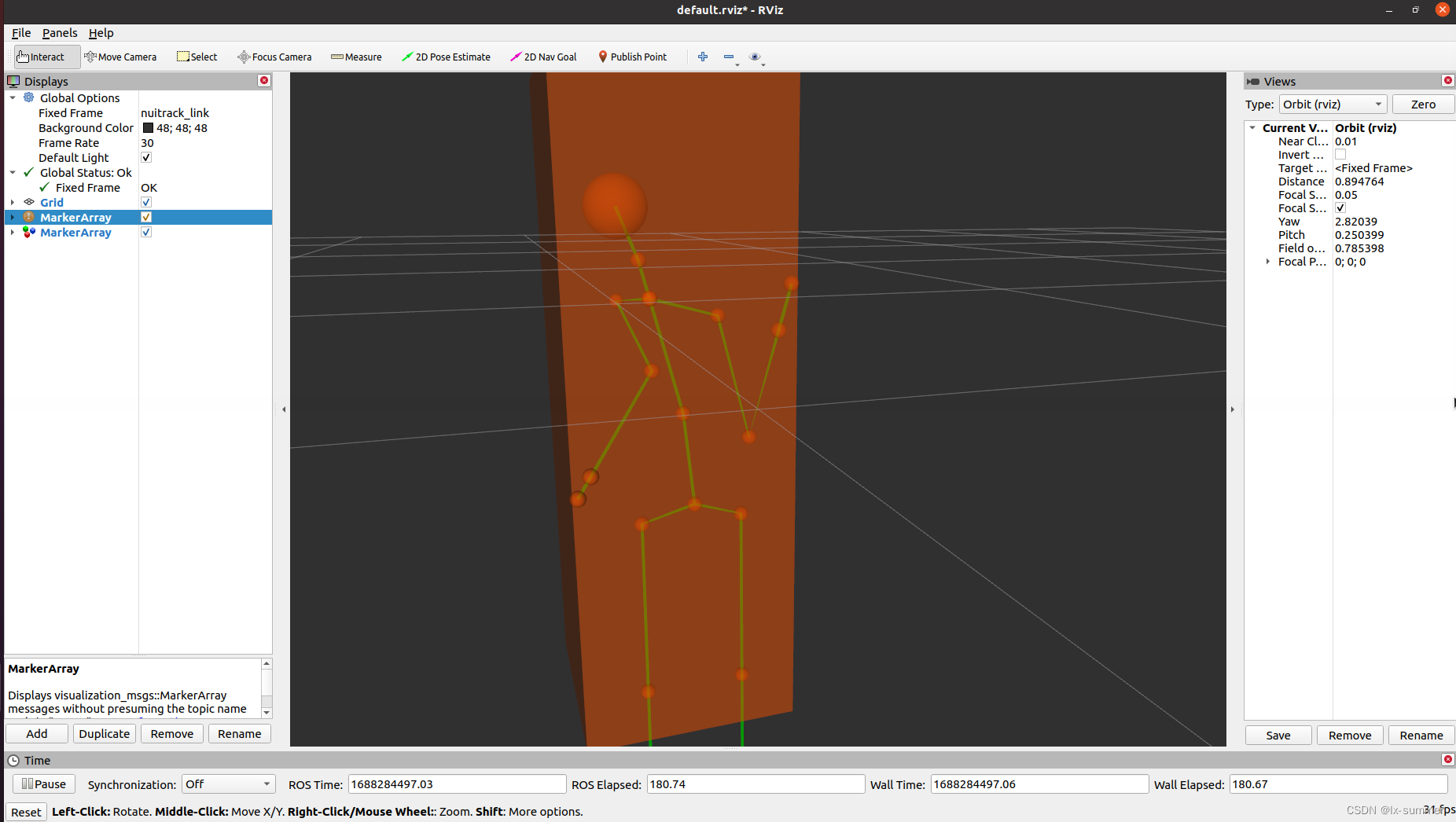
如果报错:
/usr/bin/env: “python”: 没有那个文件或目录,则将viewer_node.py文件中第一行改为#!/usr/bin/env python3。
问题记录
sudo apt-get install ros-$ROS_DISTRO-realsense2-camera
- Rviz问题:打开rviz报错:
/opt/ros/noetic/lib/rviz/rviz: symbol lookup error: /opt/ros/noetic/lib/librviz.so: undefined symbol: _ZN4YAML7Emitter5WriteERKNSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEE
解决方案:在.bashrc中添加export LD_LIBRARY_PATH=/usr/lib/x86_64-linux-gnu/:$LD_LIBRARY_PATH

















 7078
7078











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











