






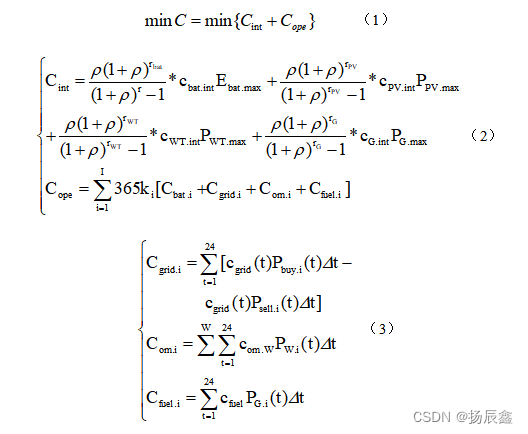
2.1目标函数:
目标函数主要考虑了投资成本和运行成本两部分,其中,投资成本主要为储能的等年值投资成本,运行成本则包括配电网交互成本(购售电成本)、各单元运维成本以及微型燃气轮机的燃料成本。

2.2 各单元约束条件
2.2.1微型燃气轮机

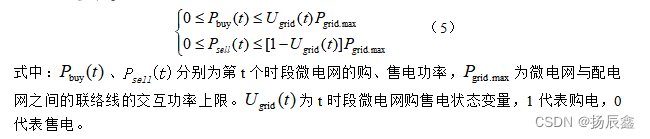
2.2.2配电网交互
2.2.3储能
1储能充放电功率约束
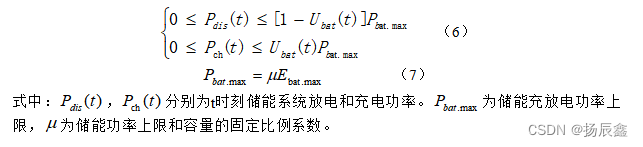
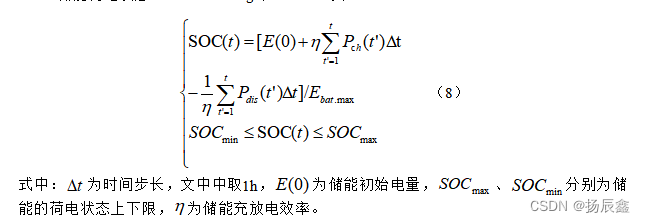
(2)2储能荷电状态(State of Charge,SOC)约束
(3)充放电量平衡约束

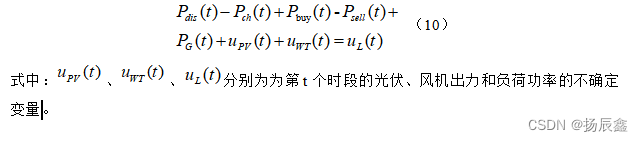
2.2.4功率平衡约束
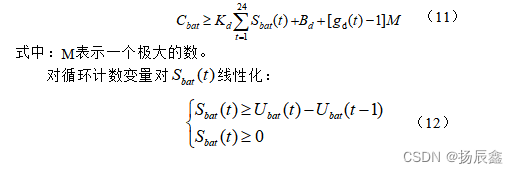
储能寿命损耗线性化约束:
对储能寿命损耗成本Cbat线性化:
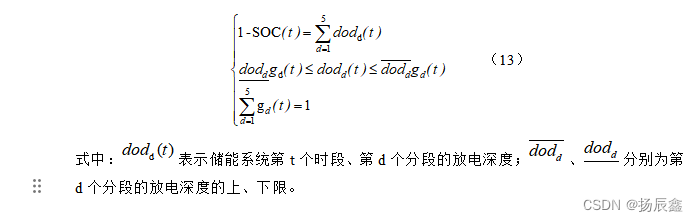
放电深度:
两阶段鲁棒模型:
参数:
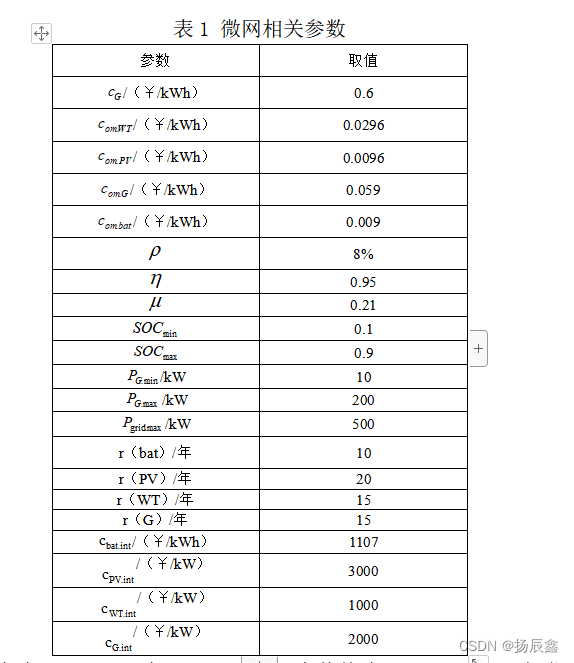
高峰电价时段为9:00-11:00和19:00-23:00,电价均为1.35元/kWh,低谷电价时段为24:00-8:00和12:00-18:00,电价分别为0.48元/kWh和0.9元/kWh。
3.2 两阶段鲁棒模型及求解方法
3.2.1 两阶段鲁棒优化模型
(1) 模型预处理

(2) 等效模型和不确定集
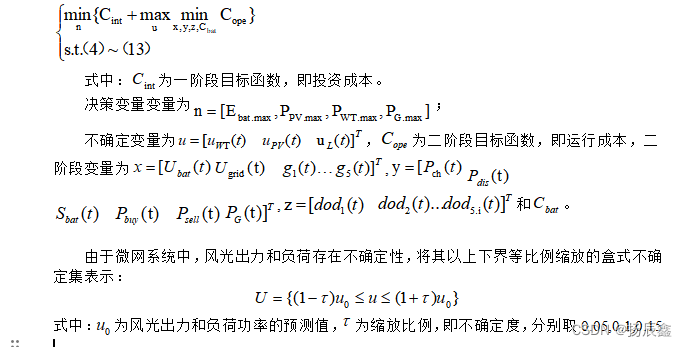
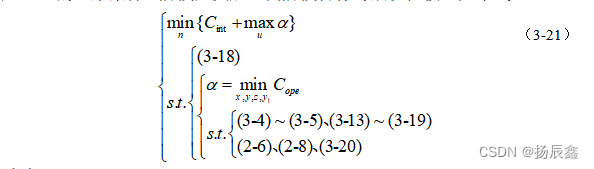
为了解决微电网中风光出力和负荷功率的不确定性问题,将鲁棒优化的思想引入3.1中的确定型模型,构建了微电网的两阶段鲁棒优化容量配置模型,其一阶段目标函数为微电网的投资成本,二阶段目标函数为微电网的运行成本。将上文预处理过的约束条件分阶段归类后,两阶段鲁棒等效优化模型如下式:
式中:
| n | —— | 一阶段决策变量,为微电网各微源的配置容量; |
| u | —— | 不确定变量,为微电网风光出力和负荷功率; |
| x | —— | 二阶段决策变量,为微电网各微源的0/1状态变量; |
| y | —— | 二阶段决策变量,为微电网各微源的时序出力; |
| y1 | —— | 电池储能日循环次数计数变量,为0/1变量; |
| z | —— | 二阶段决策变量,为电池储能的分段放电深度; |
一、二阶段决策变量及不确定变量的具体公式如下:

由于在微网系统中风光出力和负荷存在不确定性,将其以上下界等比例缩放的盒式不确定U集表示,如下式:

(3)约束的抽象形式
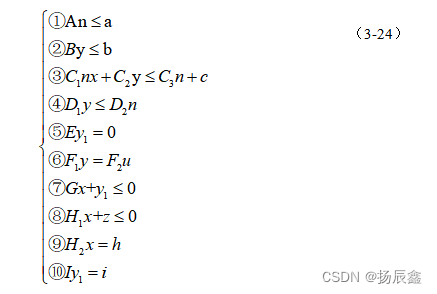
将式(3-21)中的约束经合并整理后,产生了如下几类抽象约束模型(为避免表述过于繁琐,不等式约束仅写出“≤”形式):
式中:
| ① | —— | 约束(3-18)的抽象形式; |
| ② | —— | 约束(3-4)和(3-5)的抽象形式; |
| ③ | —— | 约束(3-13)和(3-14)的抽象形式; |
| ④ | —— | 约束(3-16)的抽象形式; |
| ⑤ | —— | 约束(3-17)的抽象形式; |
| ⑥ | —— | 约束(3-19)的抽象形式; |
| ⑦ | —— | 约束(3-20)的抽象形式; |
| ⑧ | —— | 约束(2-8)第二式的抽象形式; |
| ⑨ | —— | 约束(2-8)第三式的抽象形式; |
| ⑩ | —— | 约束(2-6)的抽象形式。 |
3.2.2 求解方法
对于上述两阶段鲁棒模型,本章节采用C&CG算法(分支定界法)将其分解为主问题和子问题,以便交替求解。这种算法通过将原始问题分解为一系列子问题,并在每个子问题中找到最优解,从而逐步逼近原始问题的全局最优解。
在求解过程中,我们可能会遇到一些数学问题,如线性规划、整数规划等。针对这些问题,本章节也给出了单独的说明和解决方法。例如,对于线性规划问题,我们可以采用线性规划算法进行求解;对于整数规划问题,我们可以考虑采用分支定界法或动态规划算法进行求解。
总之,通过采用C&CG算法并将之分解为主问题和子问题,我们可以更好地理解和求解上述两阶段鲁棒模型,从而得到更加准确和可靠的调度方案。同时,本章节也针对求解过程中可能遇到的数学问题给出了单独的说明和解决方法,以确保求解过程的顺利进行。
主问题:
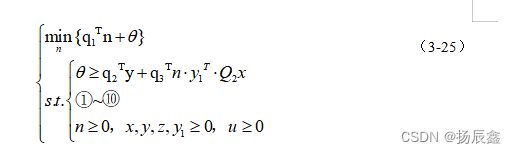

子问题:
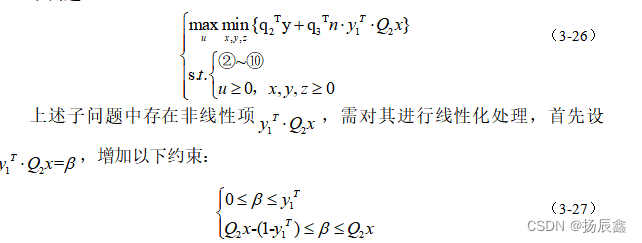
用 KarushKuhn-Tucker(KKT)条件将max-min双层问题转换成max单层问题求解。
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











