







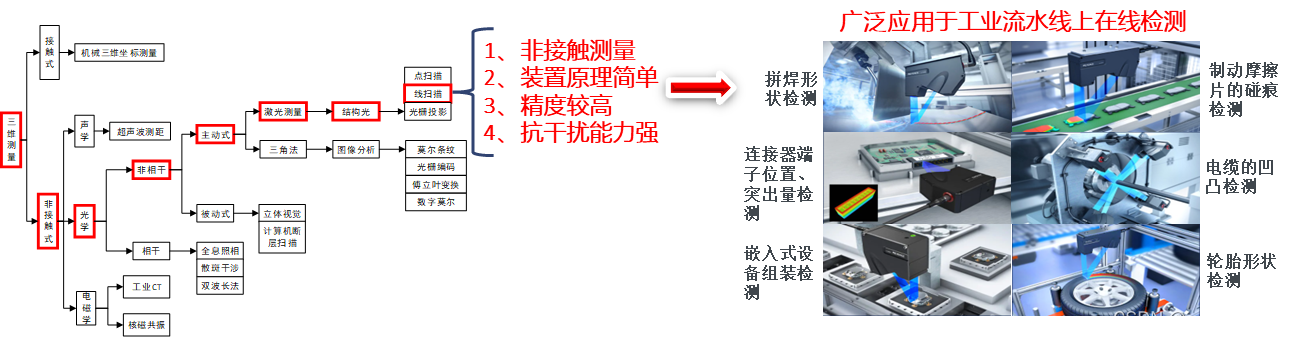
 本文介绍了点激光、线激光和面激光的工作原理,以及它们在去除痤疮疤痕美容、扫地机测距和三维数据合成中的应用。详细讲解了线激光的固态特性及其在测量、成像等领域中的作用,以及线激光的测距原理和常见的避障方案。
本文介绍了点激光、线激光和面激光的工作原理,以及它们在去除痤疮疤痕美容、扫地机测距和三维数据合成中的应用。详细讲解了线激光的固态特性及其在测量、成像等领域中的作用,以及线激光的测距原理和常见的避障方案。
点激光、线激光和面激光
点激光就是一次只能测量一个点
点激光分为两种类型,一种是激光时差型,另外一种是三角反射型位移传感器。前者发射激光脉冲,测量发射脉冲和返回脉冲之间的时间差,并将其转换成探头与被测物体之间的距离。后者采用三角环测量被测物体与探头之间的距离,精度高,测量范围短。
应用例子: 去除痤疮疤痕的美容仪器
线激光则是一次能测量一条线上的所有点的值
与激光三角反射位移传感器原理类似,线激光也采用三角反射原理。感光板是一个矩阵,因此可以画一条激光线,同时可以测量线上所有点的位移或者距离
应用例子:扫地机的测距
面激光就是一次能测量一个面上的所有点
如果移动线激光传感器同时记录测量数据和位移数据,就可以合成三维数据。即可以测量一张面的形状,这就是面激光。
线激光的介绍
线激光,又称固态线激光:线激光扫描:利用线激光器扫描待测物体,相机采集待测物体表面的形变激光线(二维图片)。在许多应用领域中非常有用,如测量、成像、制造和建筑等。
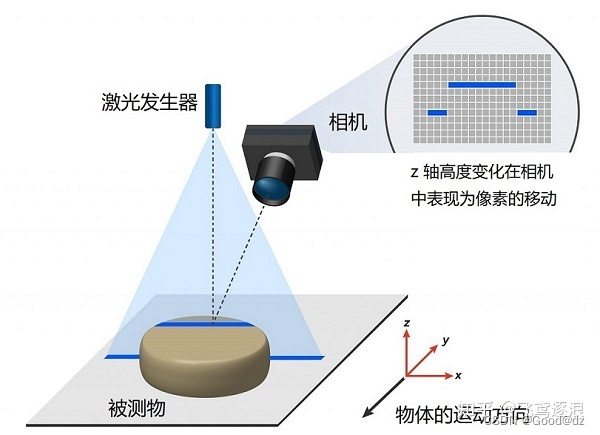
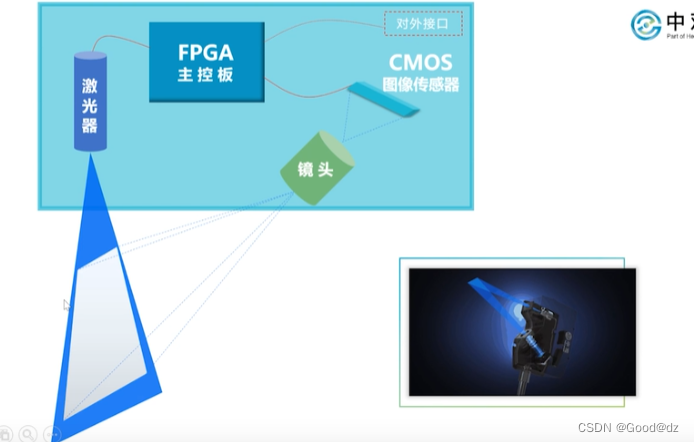
线激光使用鲍威尔棱镜,产生分布均匀的直线,相机获得的检测范围是梯形,如下图所示。
常见的避障方案
第一:红外对管避障-短距离感应且无测距功能
第二:单双目避障-高清晰度,但是深度信息不能直接获取
第三:结构光避障-距离远,可测距,一定情况下受到环境光的干扰
第四:红外PSD传感避障-短距离,可测距,但是精度不高
第五:3D TOF (更多用于扫地机顶部LIDAR偏向于导航和二维平面建模,辅助避障)
线激光的测距原理
激光雷达主要的测距方法包括:三角测距、TOF(Time of flight-直译:飞行时间)这两大类型。其中,线激光采用的是三角测距的原理,被测物体的最远距离:8到12m。
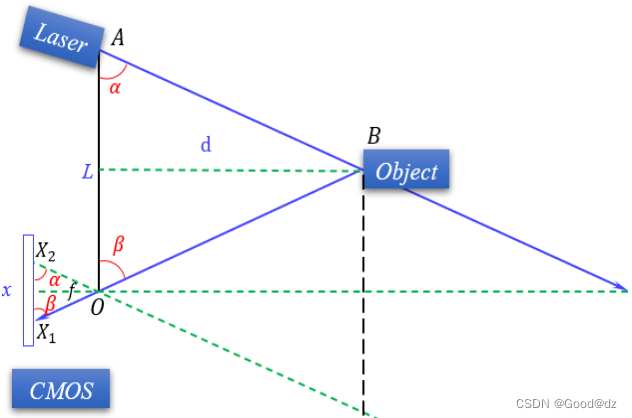
如图所示,为三角测距激光雷达的原理图。首先激光发射器(Laser)发射激光,打到物体(Object)表面时,将反射至CMOS相机处,经过相机焦点与图像交于X1 。经过相机焦点O做激光的平行线交相机成像于X2处,X1和X2 间距离为x,相机焦距为f。可以看出三角形OAB相似于三角形X1X2O,所以得到测量值d的表达式
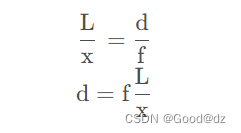
式中,f为CMOS相机焦距大小;L为激光发射器与CMOS相机间距;参量x可由三角函数得到:
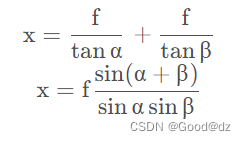
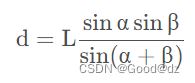
其中,α为激光发射器发射角度,角度β可由相机内参矩阵计算得到。将x带入测量值表达式,进行化简:
参考链接:https://blog.csdn.net/weixin_45929038/article/details/122743483


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









