






1.截图图像中的目标对象
1.1 查找边界矩形
1.1.1直边界矩形
一个直矩形(就是没有旋转的矩形)。它不会考虑对象是否旋转。所以边界矩形的面积不是最小的。
cv2.boundingRect(array)
输入:点集
输出:(x,y)为矩形左上角的坐标,(w,h)是矩形的宽和高。1.1.2旋转的边界矩形
这个边界矩形是面积最小的,因为它考虑了对象的旋转
cv2.minAreaRect(points) # 得到最小外接矩形的(中心(x,y), (宽,高), 旋转角度)
输入:点集
输出:返回的是一个Box2D 结构,其中包含矩形左上角角点的坐标(x,y),矩形的宽和高(w,h),以及旋转角度。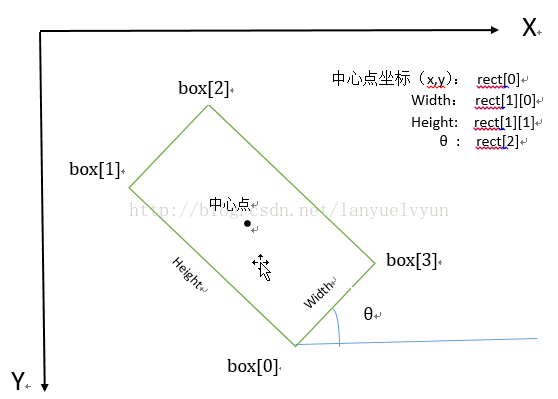
注意:
- 旋转角度θ是水平轴(x轴)逆时针旋转,直到碰到矩形的第一条边停住,此时该边与水平轴的夹角。并且这个边的边长是width,另一条边边长是height。也就是说,在这里,width与height不是按照长短来定义的。
- 在opencv中,坐标系原点在左上角,相对于x轴,逆时针旋转角度为负,顺时针旋转角度为正。所以,θ∈(-90度,0]。
1.1.3给出矩形的4 个角点
cv2.boxPoints(box, points=None)
输入:一个Box2D 结构
输出:x1,y1,x2,y21.2绘制矩形
1.2.1绘制直边界矩形
1.2.2绘制旋转的边界矩形
1.3 图像旋转
1.3.1构造旋转矩阵
# 这里的第一个参数为旋转中心,第二个为旋转角度,第三个为旋转后的缩放因子
# 可以通过设置旋转中心,缩放因子,以及窗口大小来防止旋转后超出边界的问题
M=cv2.getRotationMatrix2D((cols/2,rows/2),45,0.6)1.3.2执行图像几何变换
# 第三个参数是输出图像的尺寸中心
dst=cv2.warpAffine(img,M,(2*cols,2*rows))1.4图像截取
坐标值,感兴趣区域都为整形变量
getRectSubPix(image, patchSize, center, patch=None, patchType=None)
输入:InputArray image:输入图像
Size patchSize:获取感兴趣区域矩形的大小
Point2f center:感兴趣区域矩形在原图像中的位置(即感兴趣区域矩形的中心点坐标)
输出:截取后的图像1.5 模板匹配
2 获取指定颜色的物体
2.1色域转变为HSV
cv2.cvtColor(img2,cv2.COLOR_BGR2HSV)2.2 获取相关颜色的HSV值
通过鼠标触发获取相关位置的HSV值
img=cv2.imread("D:\\video_data\\ocr7.PNG")
img_hsv=cv2.cvtColor(img,cv2.COLOR_BGR2HSV)
def mouse_click(event, x, y, flags, para):
if event == cv2.EVENT_LBUTTONDOWN: # 左边鼠标点击
print("HSV:", img_hsv[y, x])
if __name__ == '__main__':
cv2.namedWindow("img")
cv2.setMouseCallback("img", mouse_click)
while True:
cv2.imshow('img', img)
if cv2.waitKey() == ord('q'):
break
cv2.destroyAllWindows()2.3 进行二值化图像处理
cv2.inRange(src,lowerb, upperb)
输入:src :HSV图像,
lowerb:hsv值域下限,
upperb:hsv值域上限
输出:二值化后的图像3.轮廓识别
3.1 轮廓检测
cv2.findContours(image, mode, method, contours=None, hierarchy=None, offset=None)
三个参数,第一个是输入图像,第二个是轮廓检索模式,
第三个是轮廓近似方法{cv2.CHAIN_APPROX_NONE:所有的边界点都会被存储,
cv2.CHAIN_APPROX_SIMPLE:将轮廓上的冗余点都去掉,压缩轮廓}
返回值有两个,第一个是轮廓,第二个是(轮廓的)层析结构3.2 轮廓绘制
drawContours(image, contours, contourIdx, color)
它的第一个参数是原始图像,第二个参数是轮廓,一个Python 列表。第三个参数是轮廓的索引(在绘制独立轮廓是很有用,当设置为-1 时绘制所有轮廓)。接下来的参数是轮廓的颜色和厚度














 3398
3398











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









