






 本文介绍了如何在3D空间中使用笛卡尔坐标系统精确测量位置、距离和角度,探讨了惯性坐标系、向量的定义与运算,包括点乘、投影向量的计算及其应用,以及缩放、正交投影、透视投影和矩阵变换的原理,如齐次坐标和逆矩阵的计算。
本文介绍了如何在3D空间中使用笛卡尔坐标系统精确测量位置、距离和角度,探讨了惯性坐标系、向量的定义与运算,包括点乘、投影向量的计算及其应用,以及缩放、正交投影、透视投影和矩阵变换的原理,如齐次坐标和逆矩阵的计算。
笛卡尔坐标系统
如何在3D空间中精准度量位置,距离和角度。 (描述物体位置信息)
用一个坐标来表示所有的位置
使用多坐标系的原因是某些信息只能在特定的上下文环境中获得
惯性坐标系:每条轴都与世界坐标系平行,原点与物体坐标原点重合
向量
数学定义:有方向有大小
几何意义:描述位移
任意一个点都能够用从原点开始的向量来表达。
向量运算
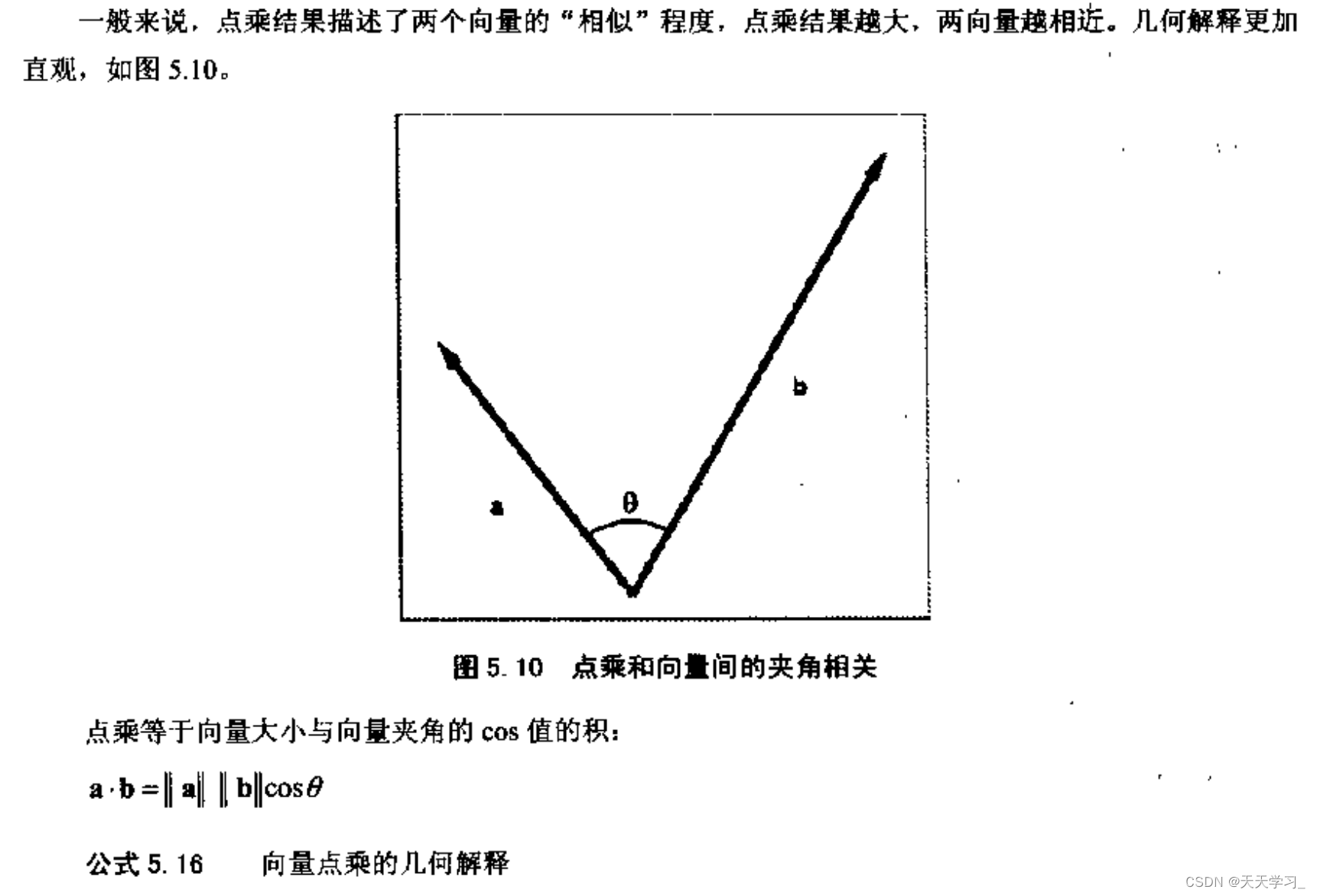
点乘:
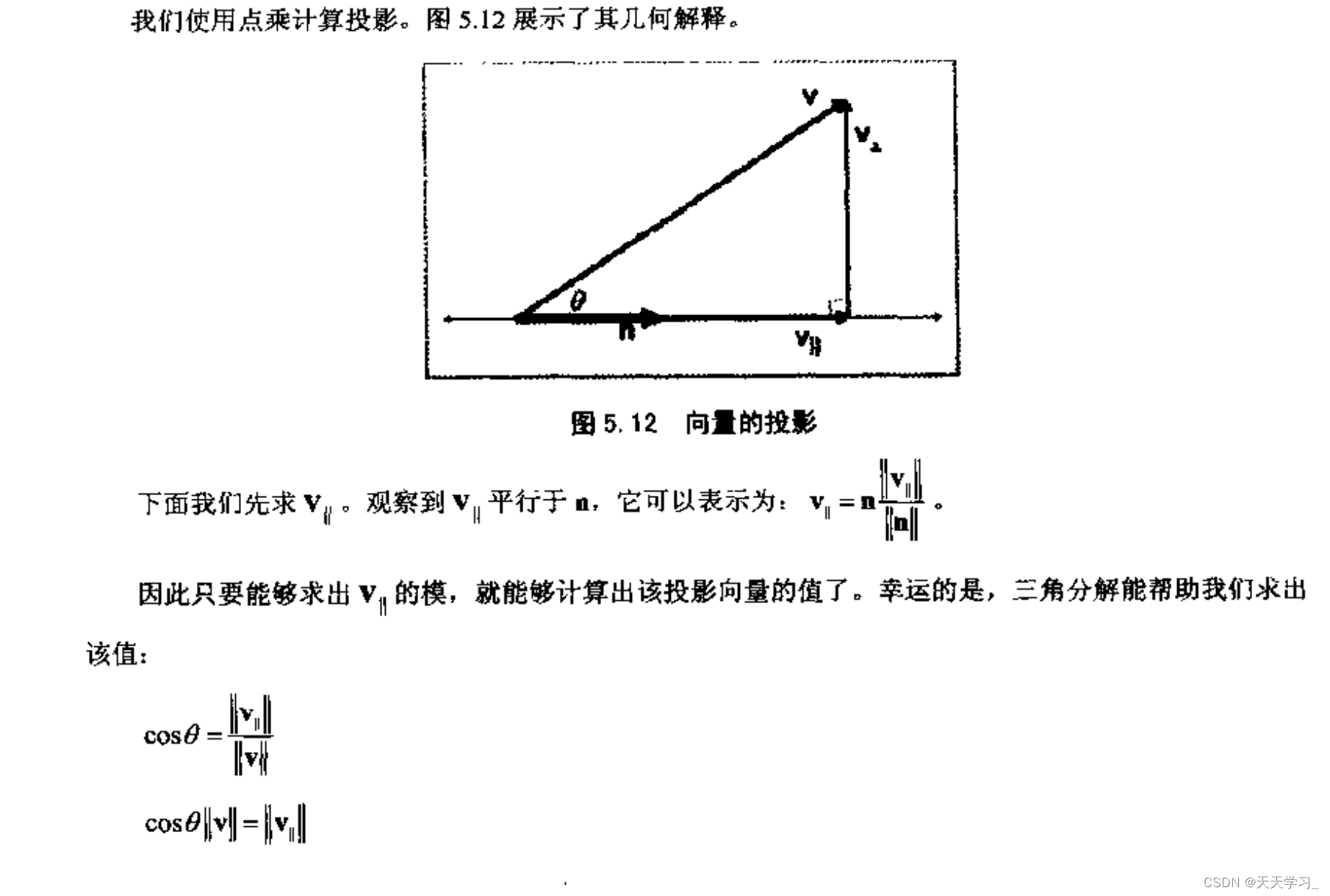
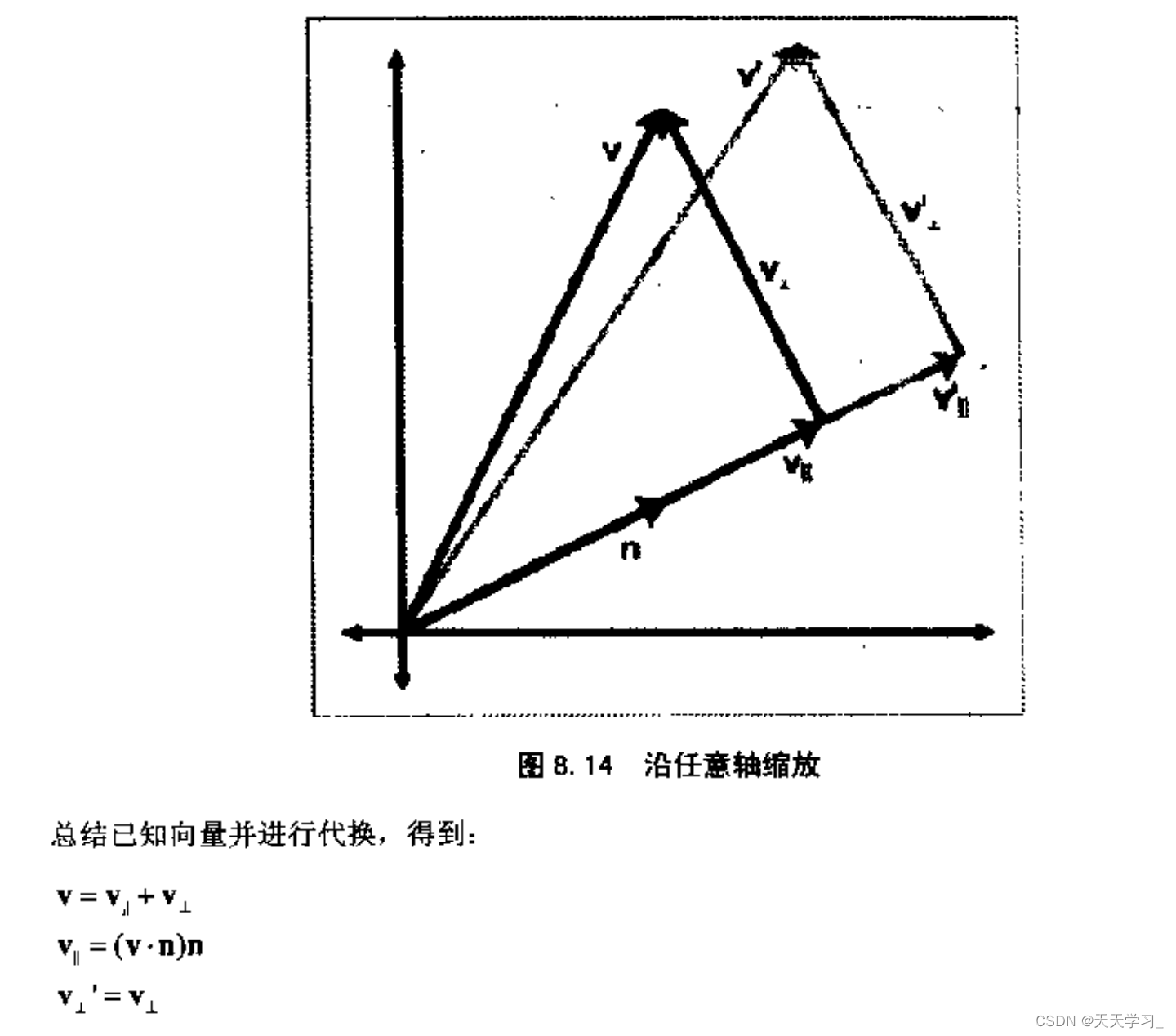
v平行和n的关系
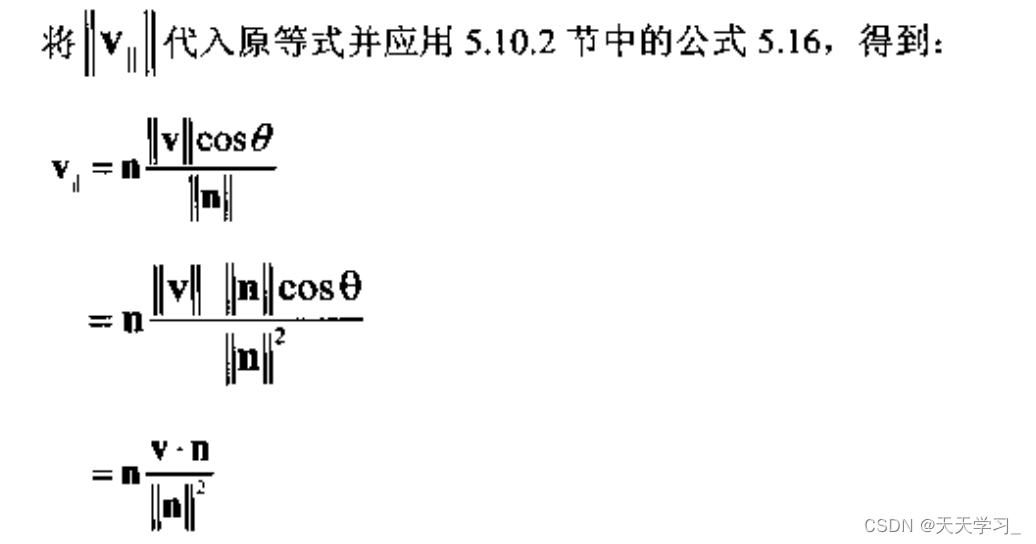
v平行的模与v的模关系
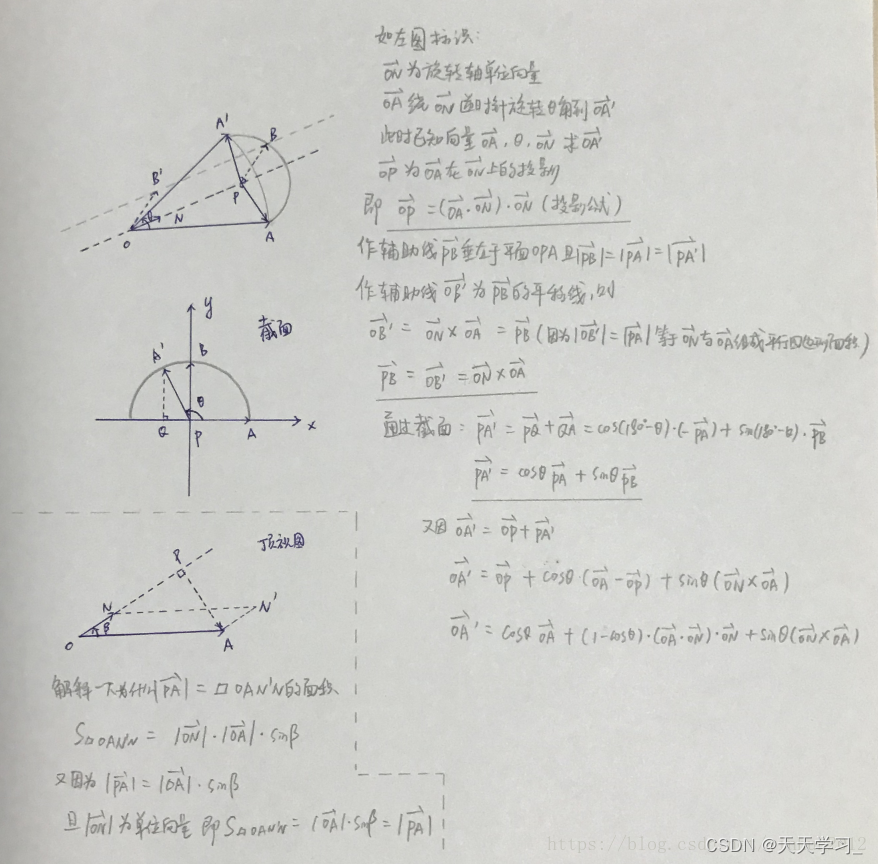
投影向量的应用
投影向量的计算过程,是一个向量分解的过程,这种向量分解的思路在后面推导其他内容时很有帮助,例如求解后面的物体旋转矩阵时会派上用场。
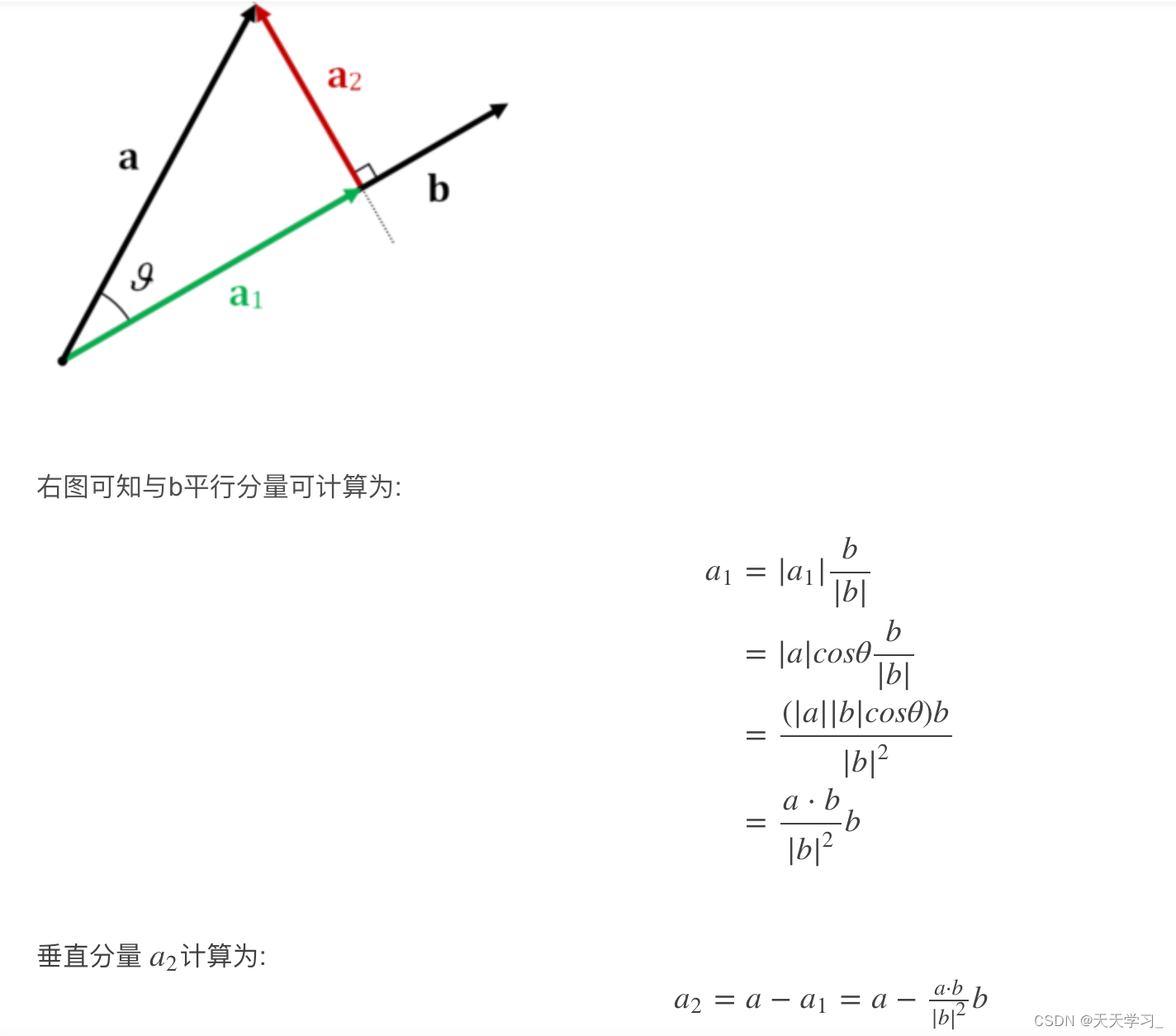
已知两个向量 -> 投影向量/垂直向量
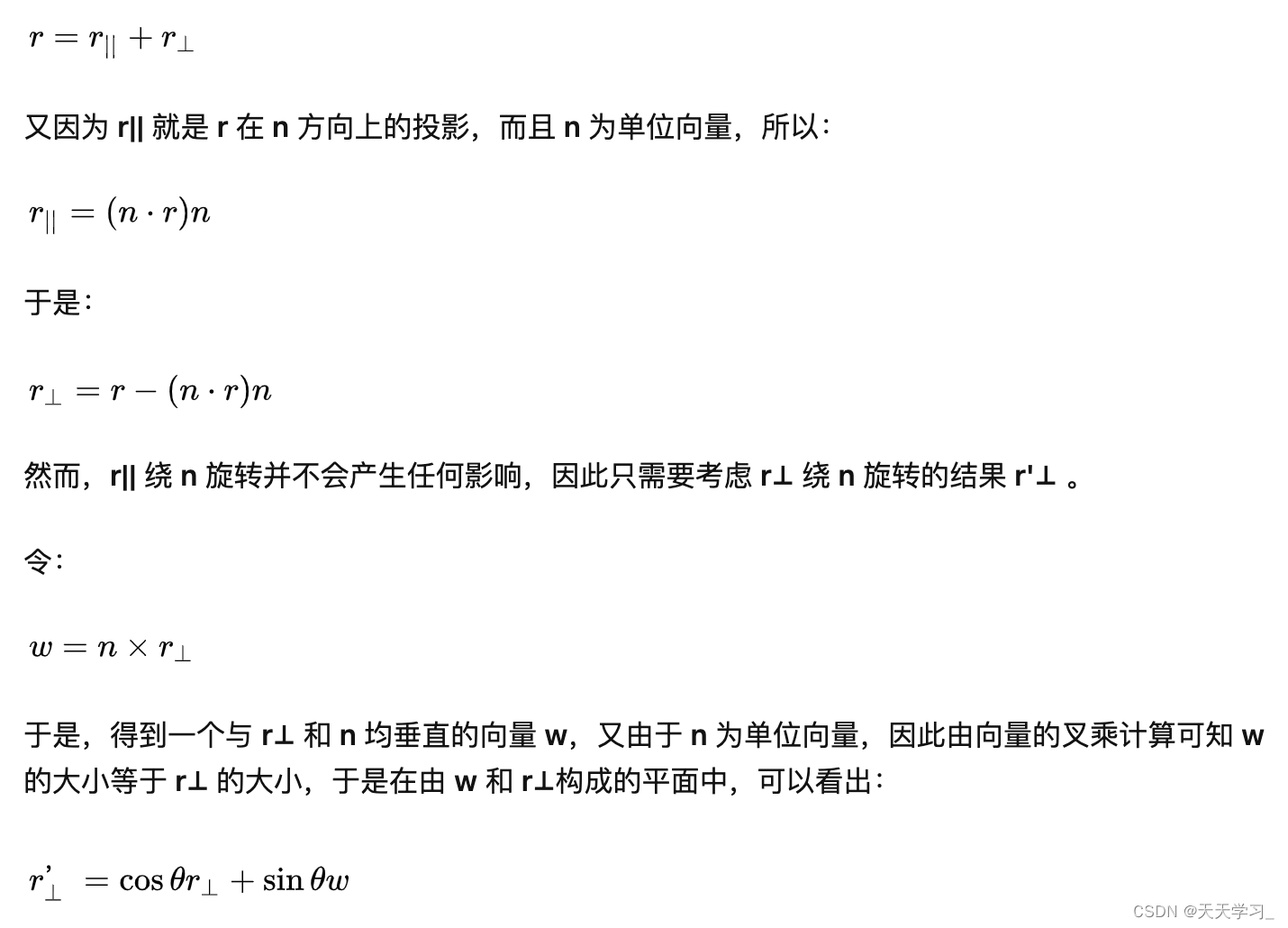
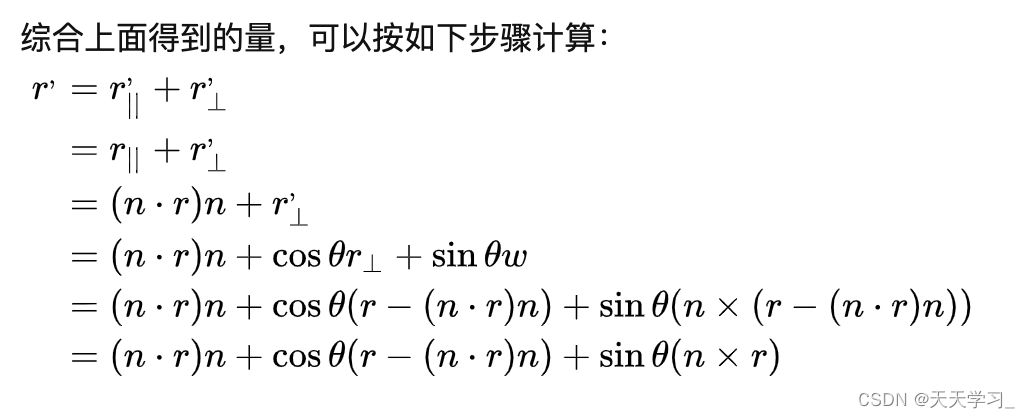
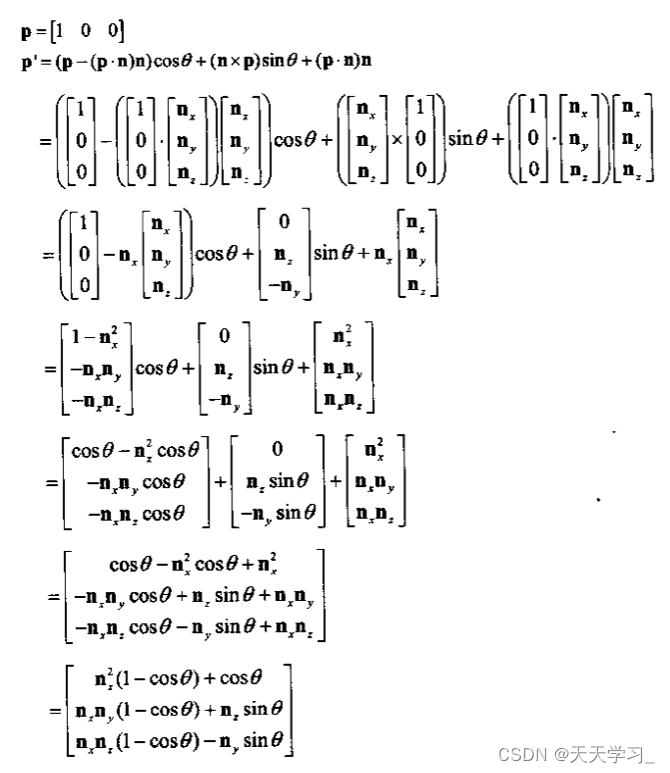
3D绕任意轴旋转
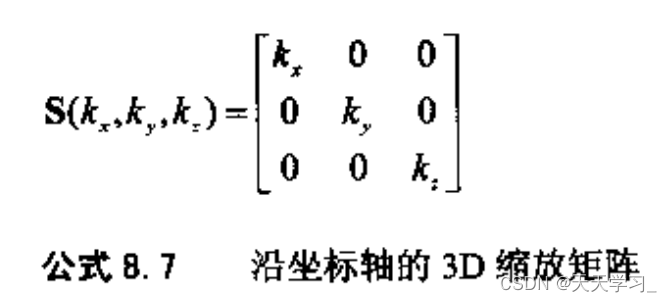
缩放
沿轴缩放:
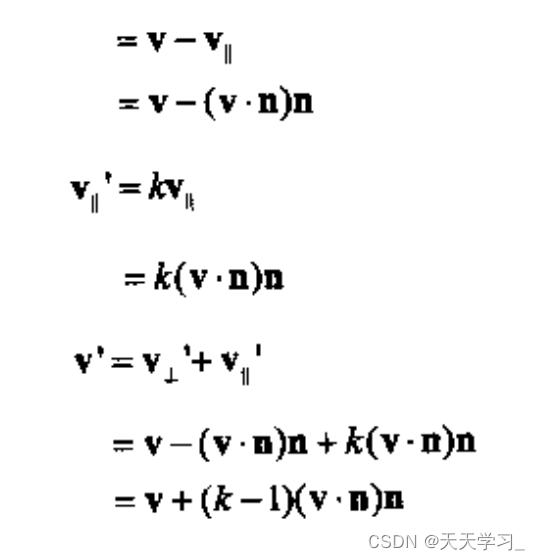
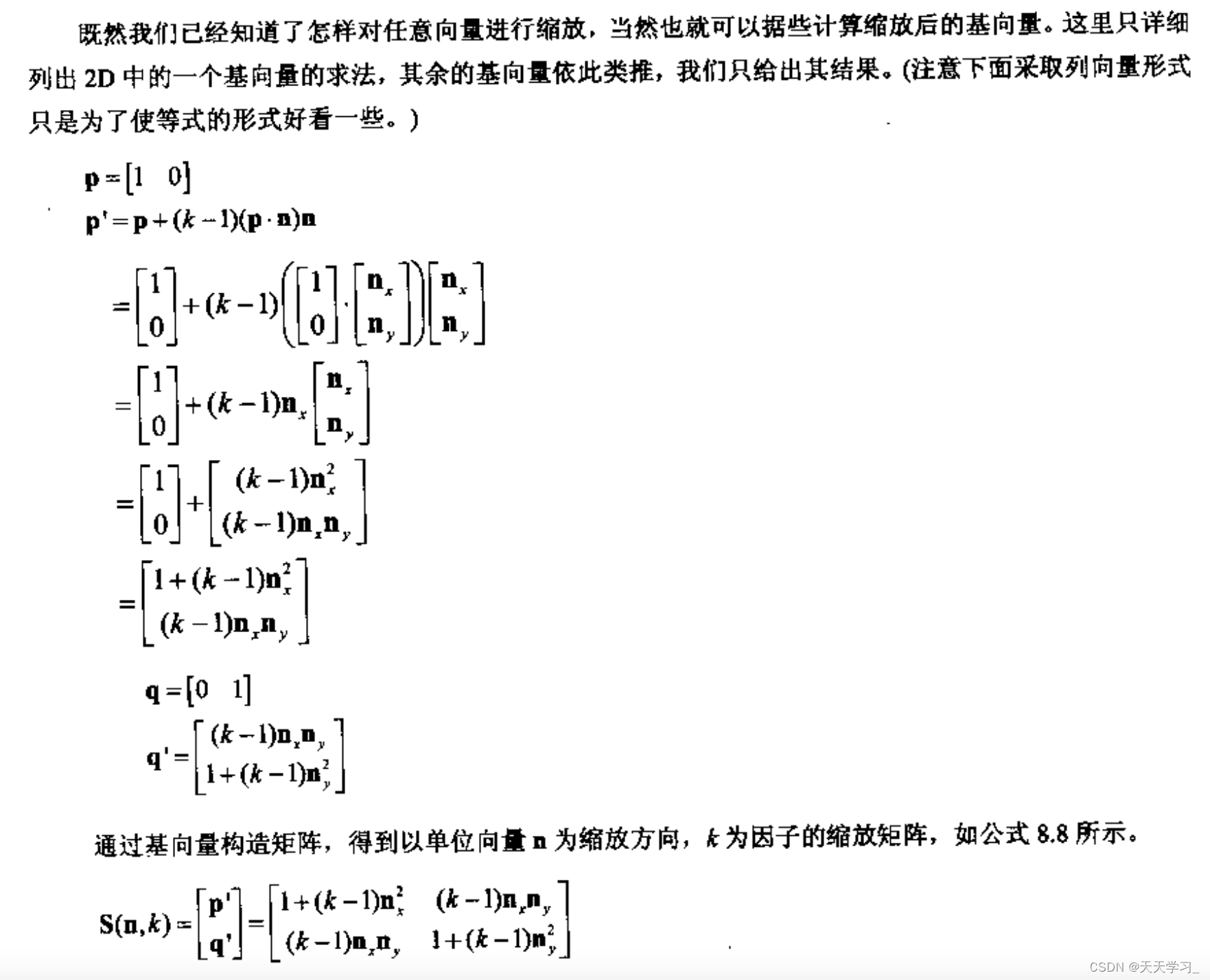
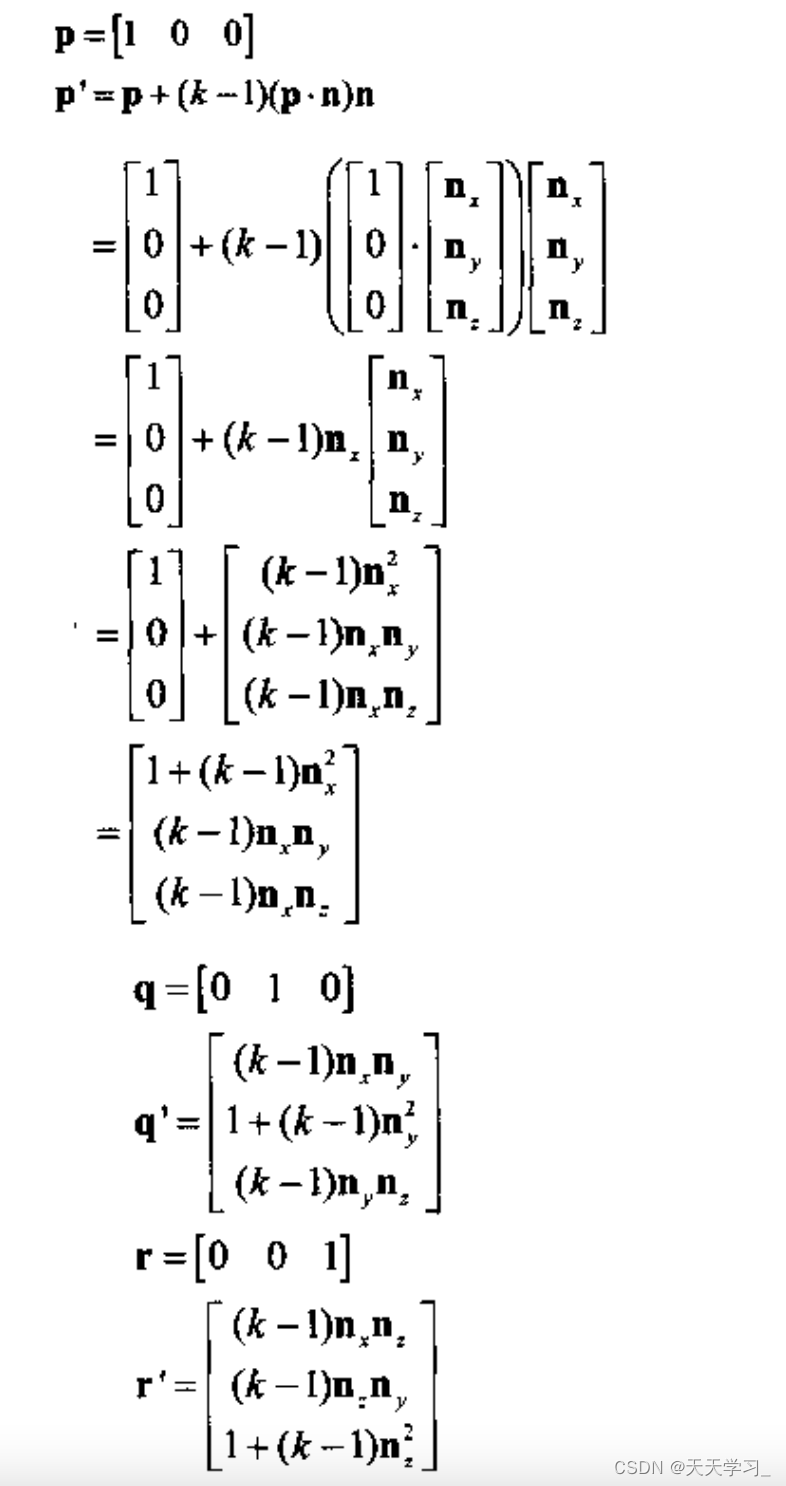
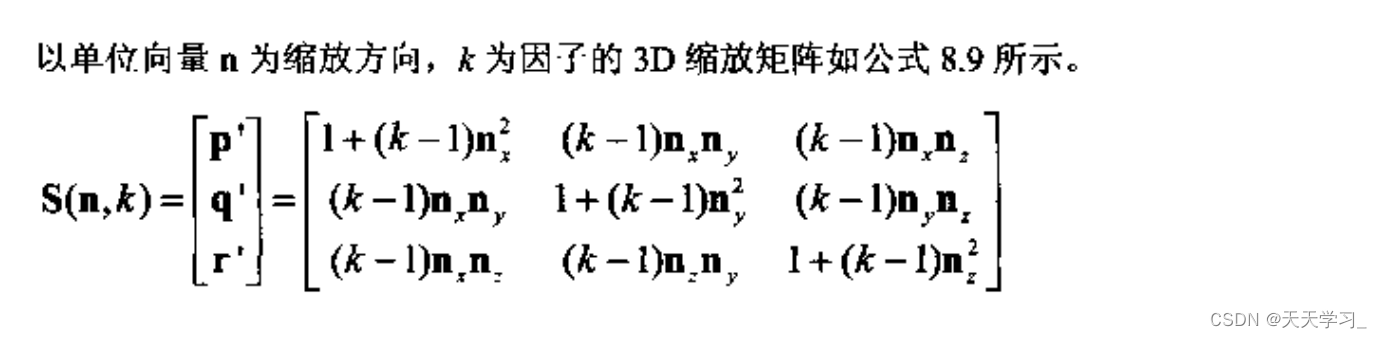
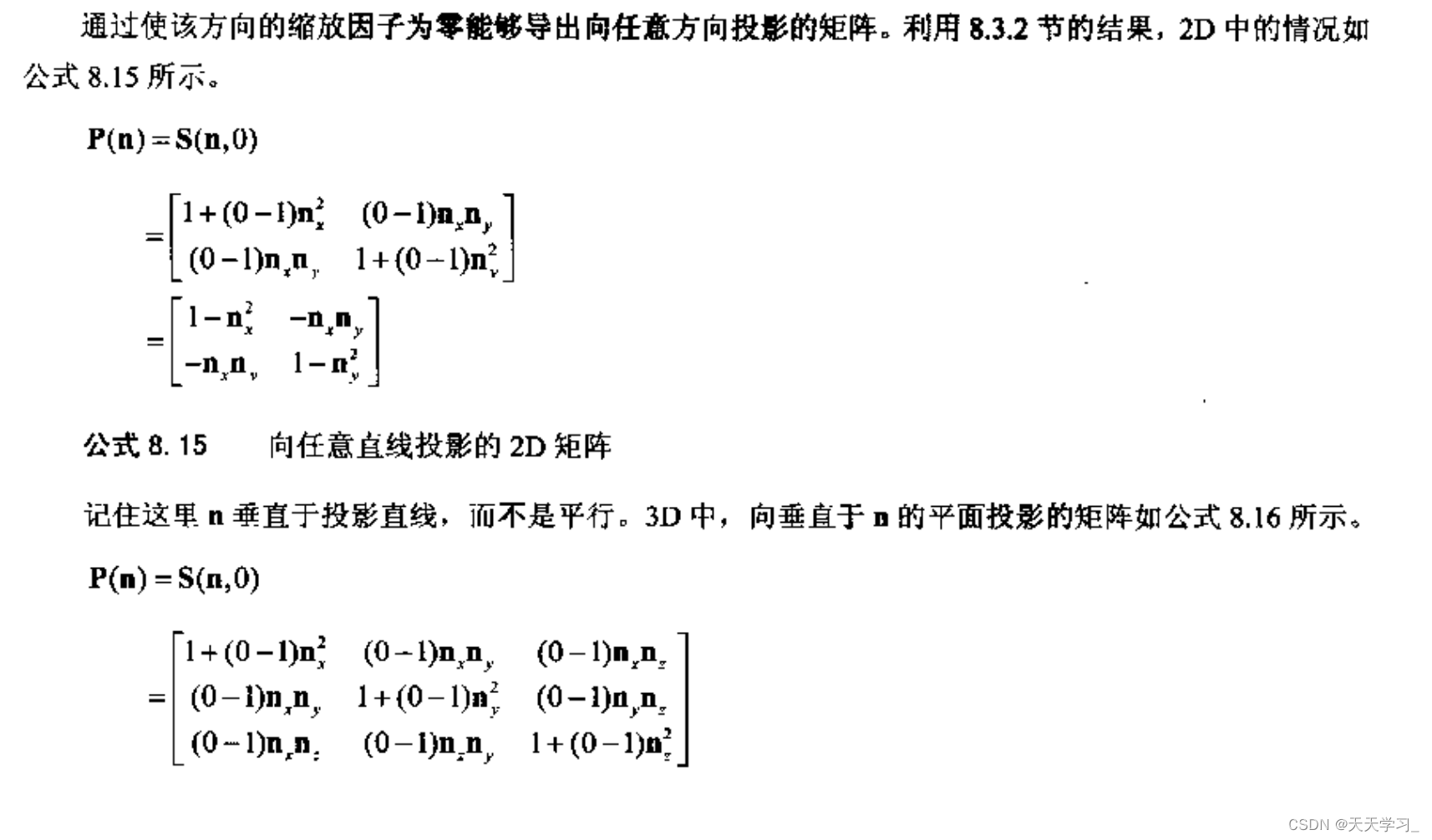
任意方向缩放:
2D
3D
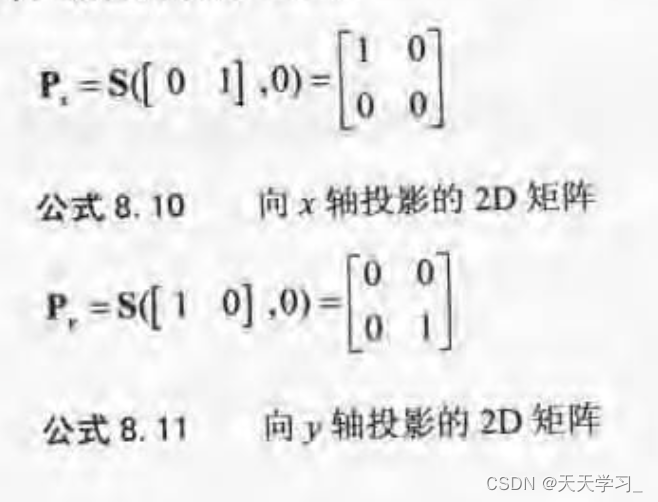
正交投影
2D
3D
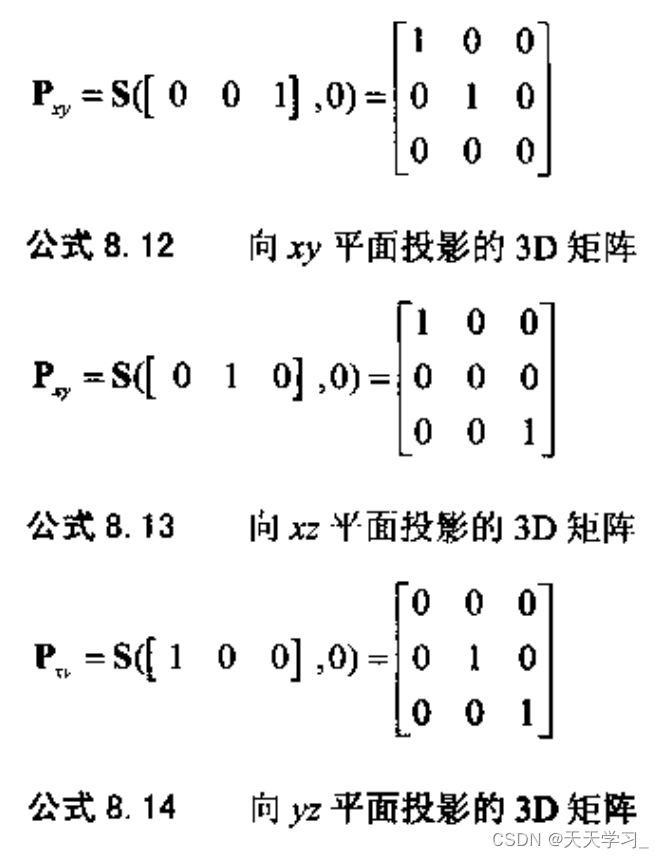
任意轴投影:

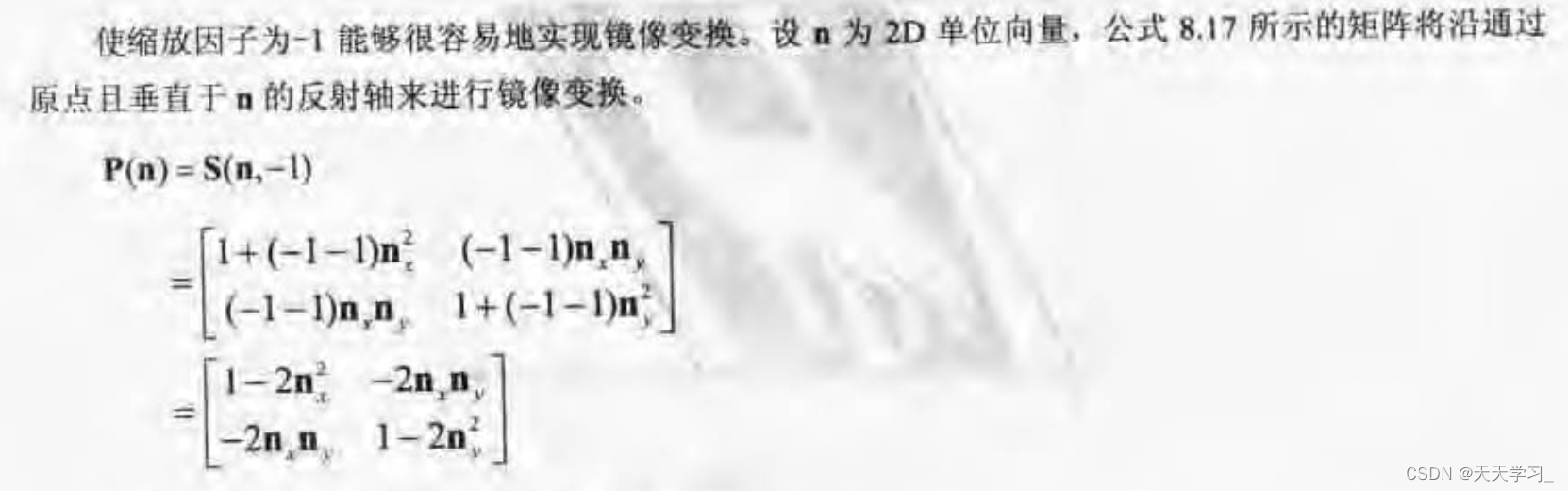
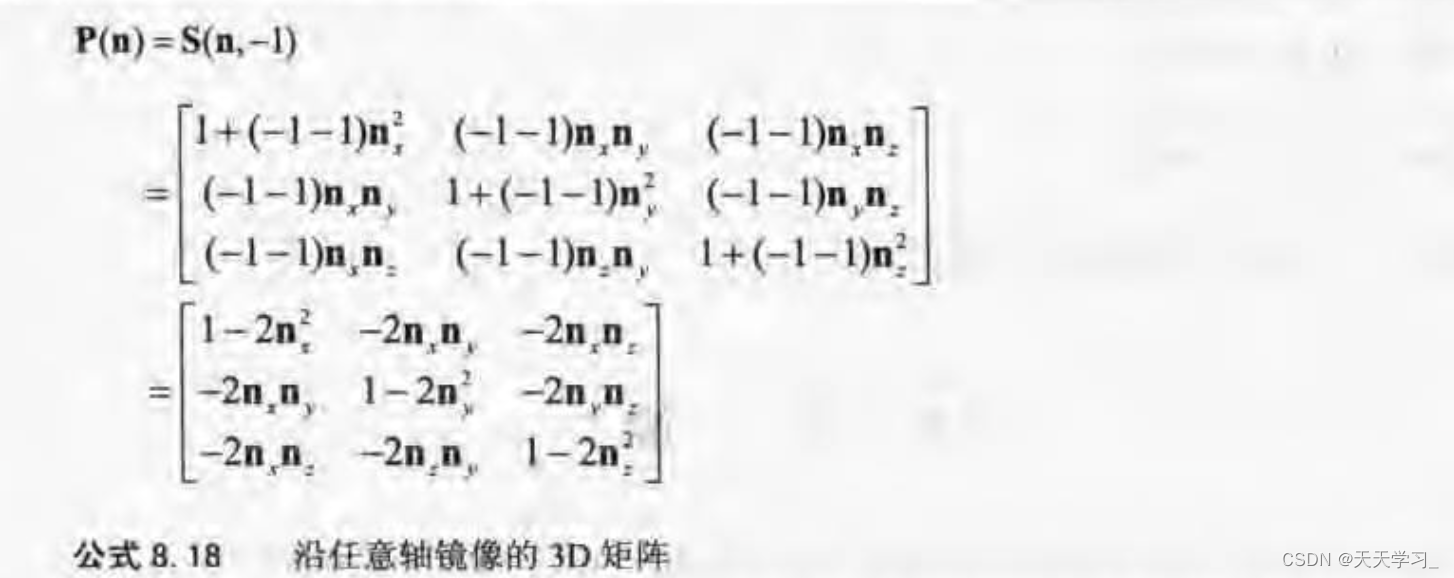
镜像
2D
3D
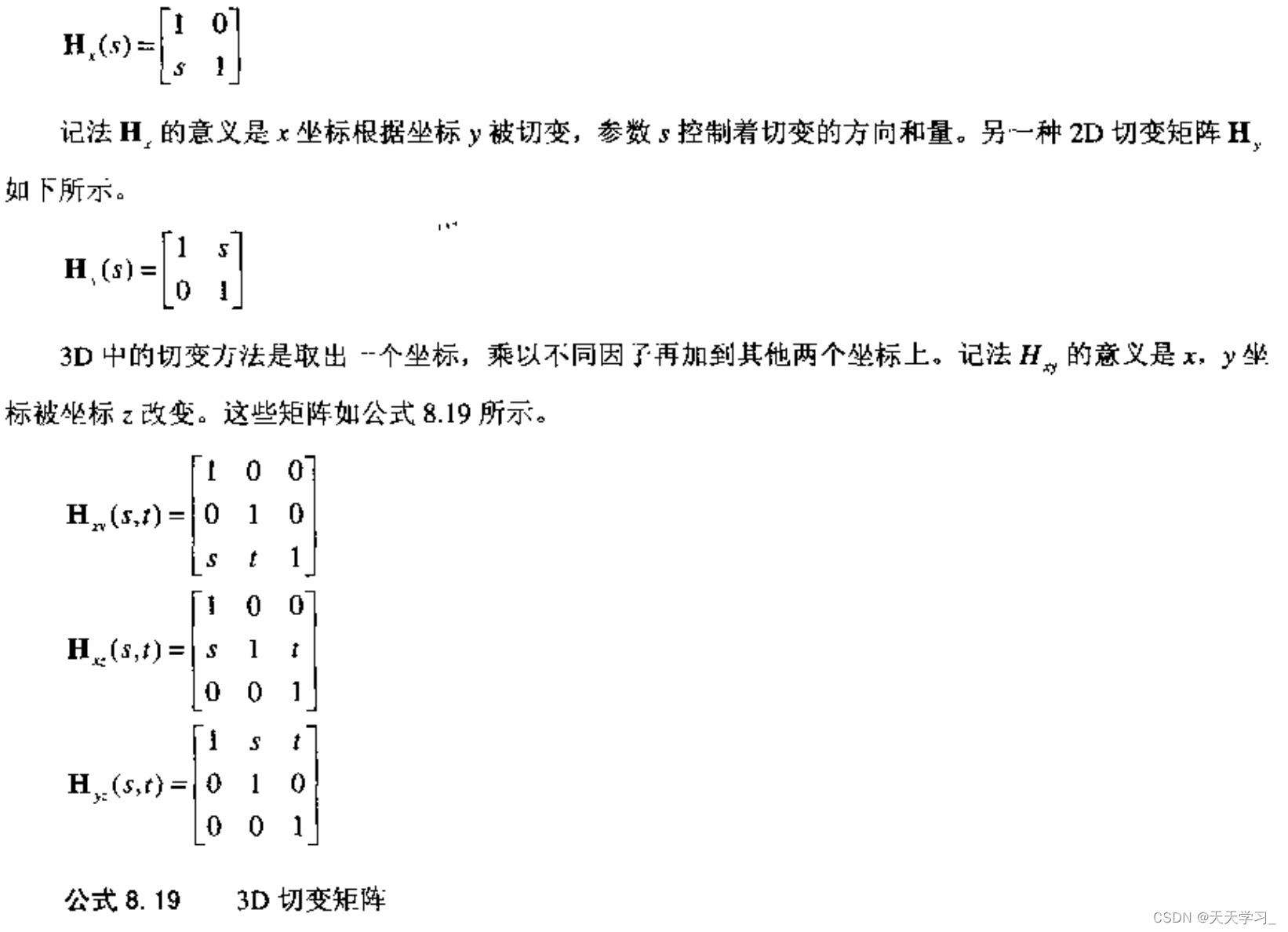
切变
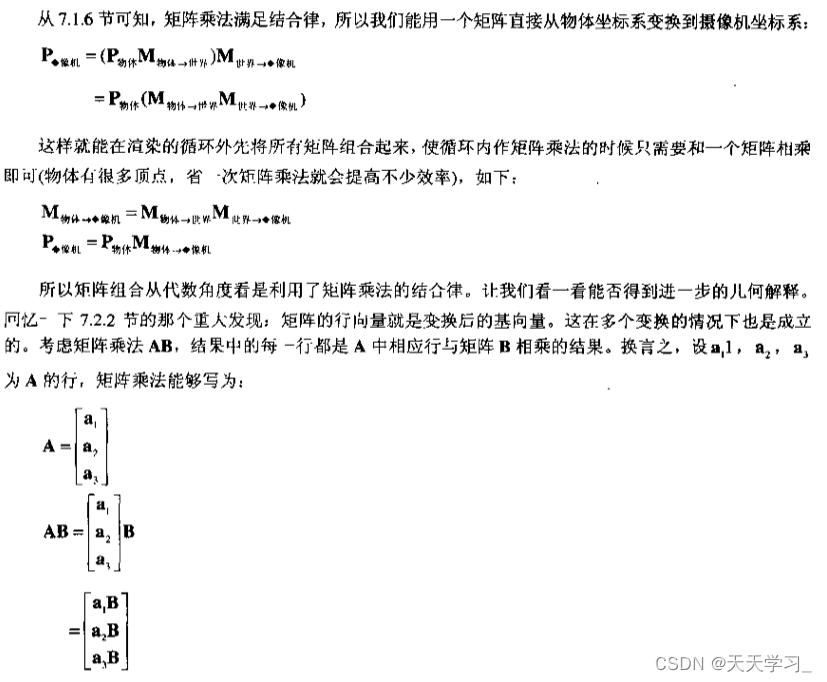
变换的组合
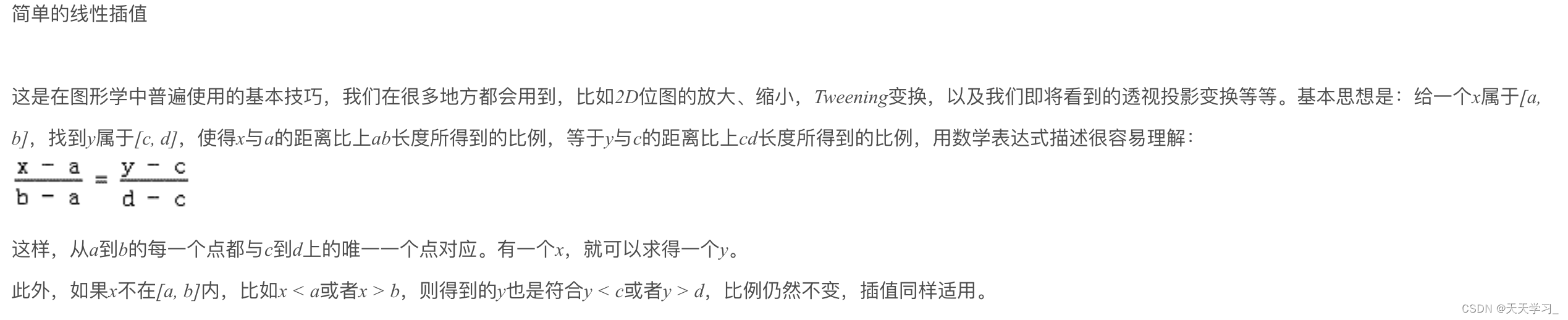
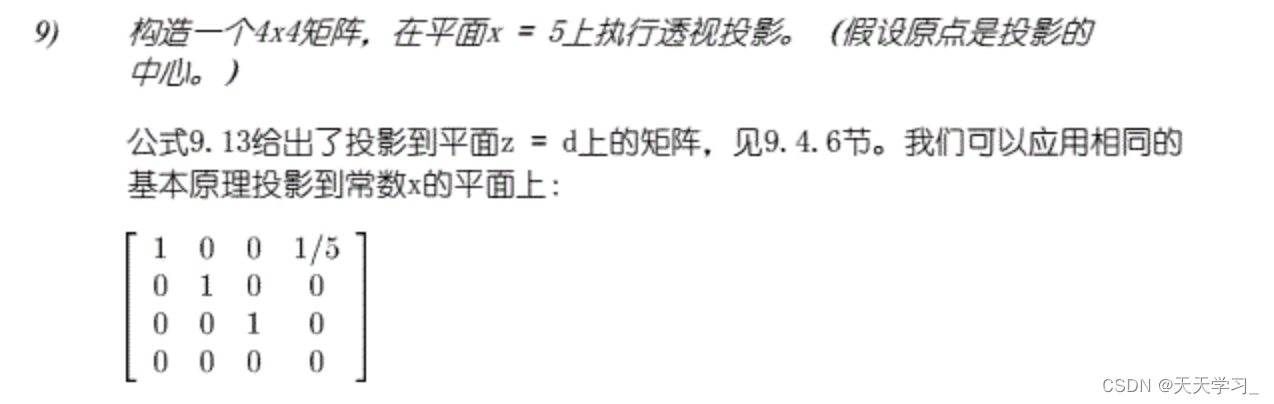
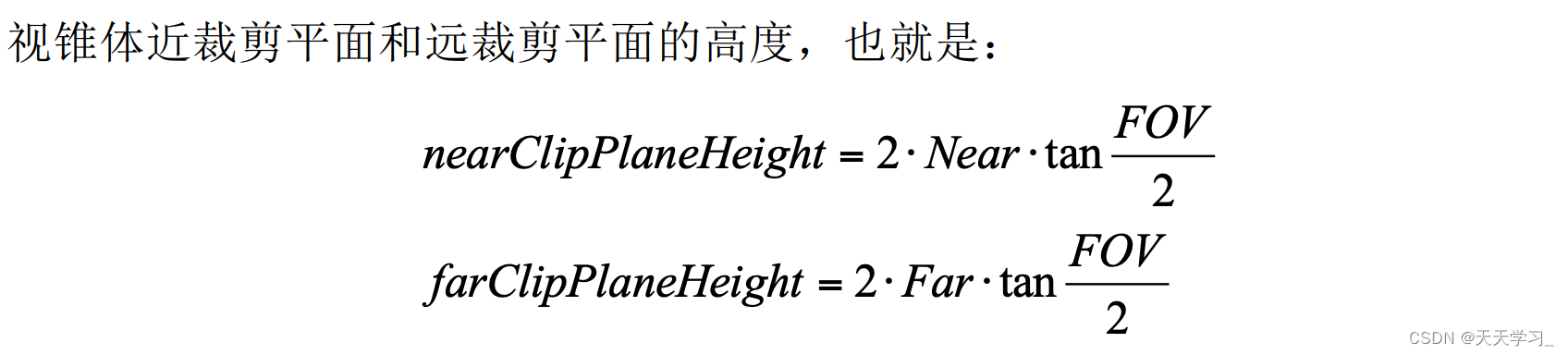
透视投影变换
用4个代数分量表示3D几何概念的方式是一种齐次坐标表示。
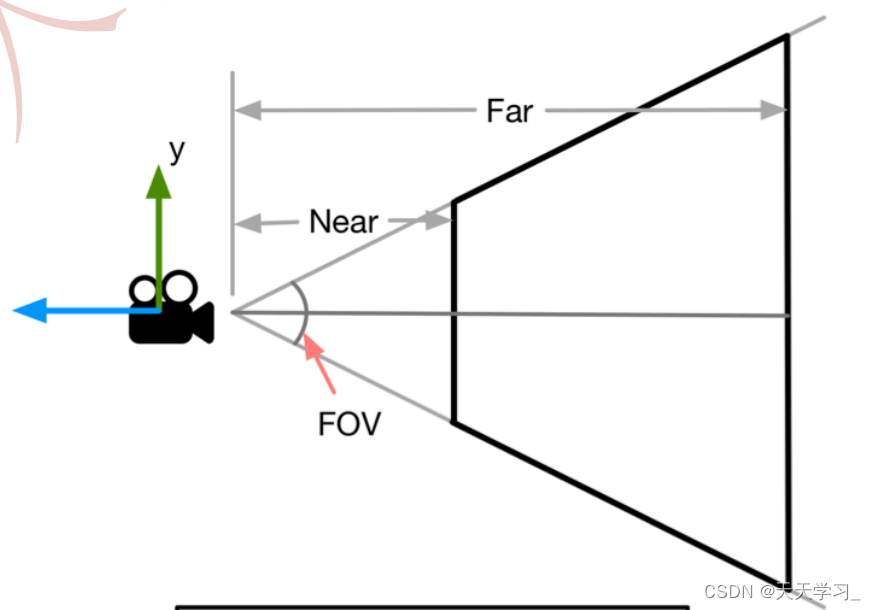
小孔成像
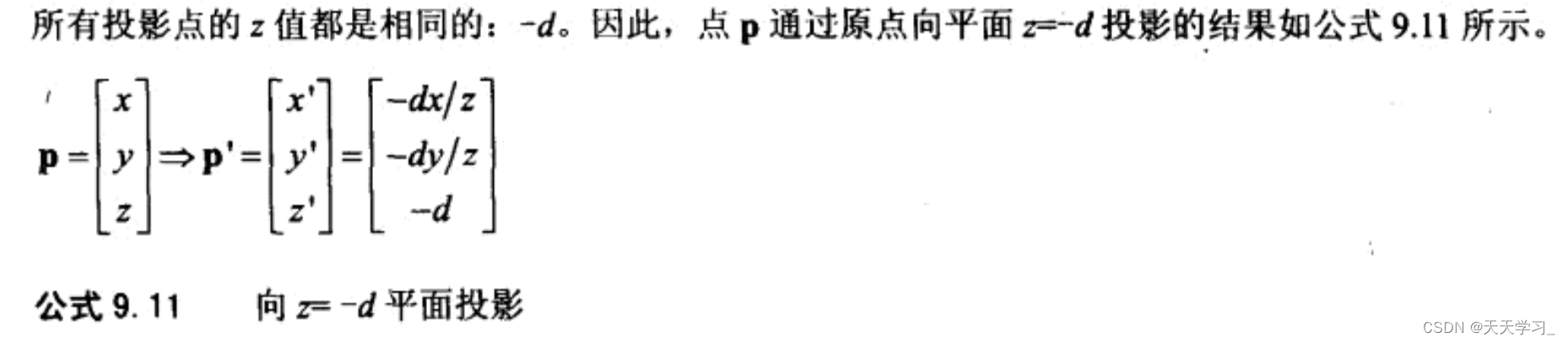
3D投影矩阵->4D :
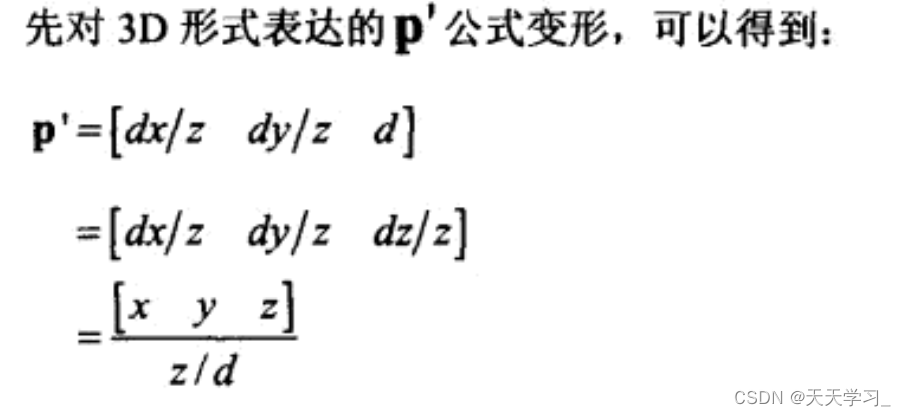
4D -> 3D 生成透视投影矩阵
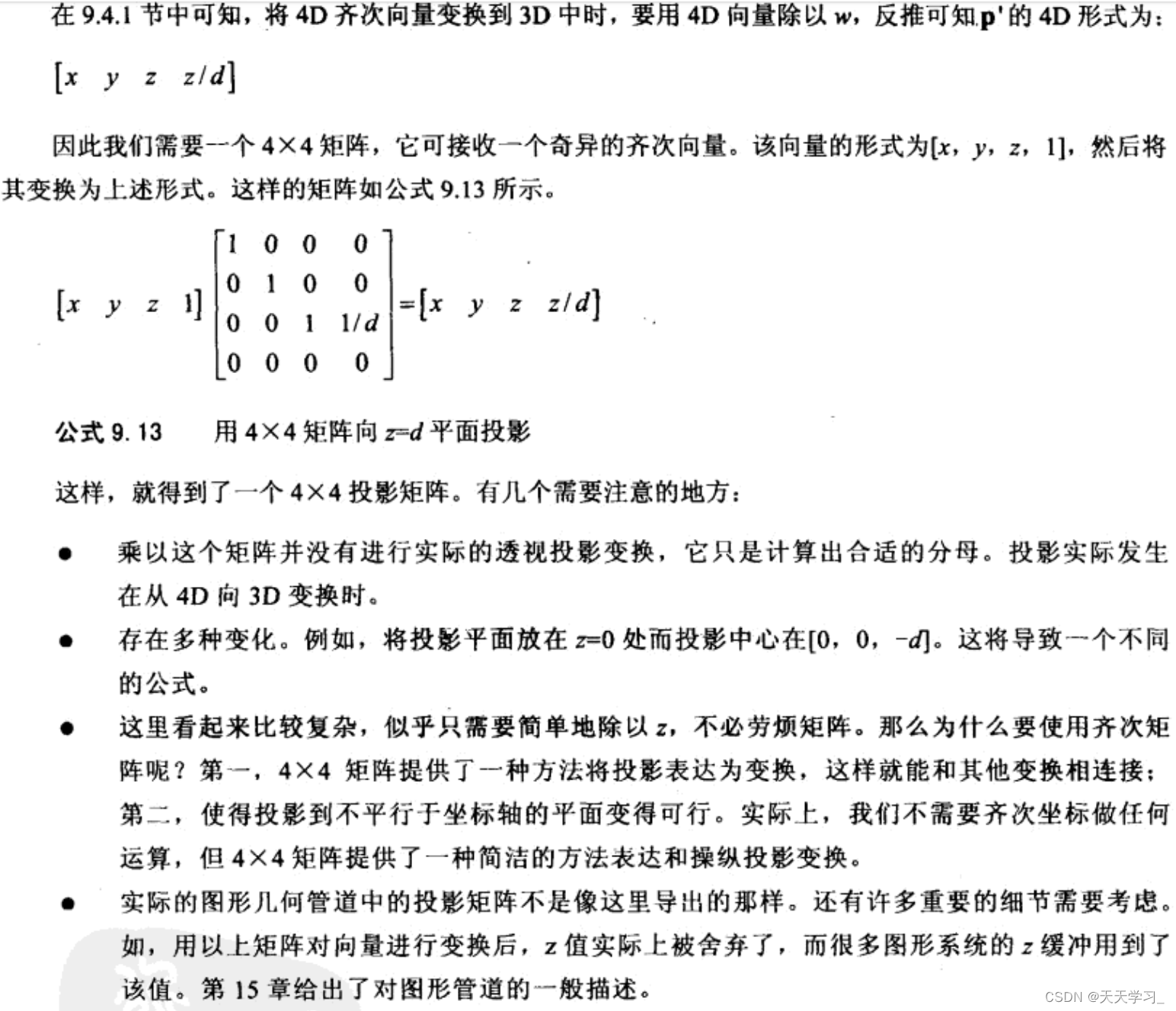
投影矩阵
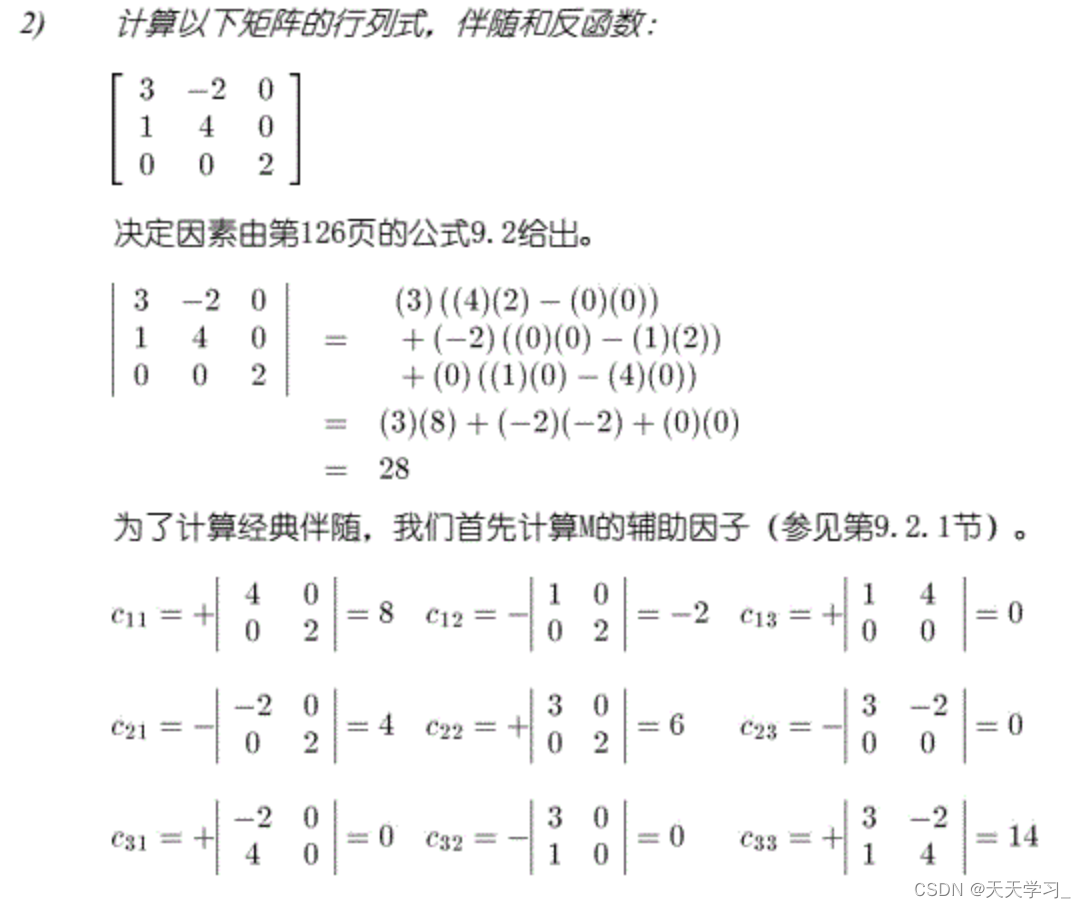
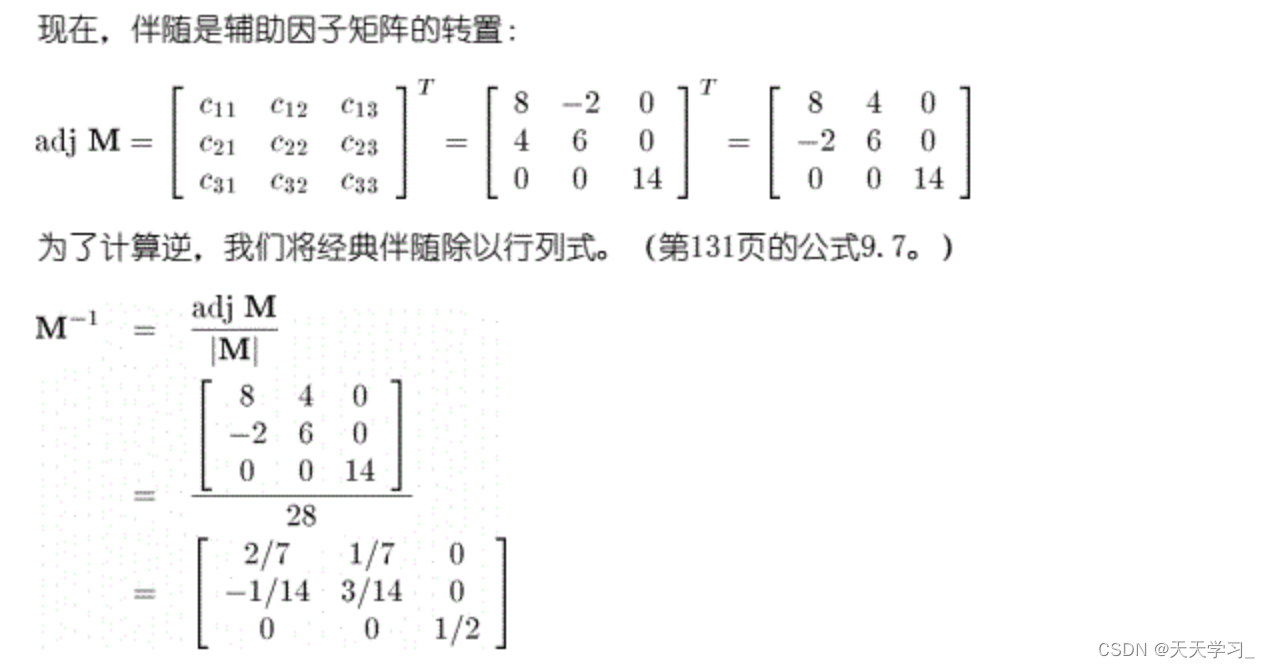
逆矩阵
1.正交矩阵 MM转置 = 1 。 MM逆 = 1 。-> M转置 = M逆
2.计算行列式逆矩阵:1.计算M辅助因子 2.伴随是辅助因子的转置3.经典伴随/行列式















 3636
3636











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









