






 本文档介绍了二阶低通滤波的原理、MATLAB实现以及阻尼比和截止频率的理解,随后深入探讨了卡尔曼滤波的工作原理、示例代码,并分享了几个关键知识点和实用技巧。通过实例演示,帮助读者掌握这两种滤波技术在工程实践中的应用。
本文档介绍了二阶低通滤波的原理、MATLAB实现以及阻尼比和截止频率的理解,随后深入探讨了卡尔曼滤波的工作原理、示例代码,并分享了几个关键知识点和实用技巧。通过实例演示,帮助读者掌握这两种滤波技术在工程实践中的应用。
目录
1.引言
相比于上一篇,这篇会写的简单很多,可能因为难度略低吧。
还是工程化,不大篇幅抄理论,直接上可落地的干货。
2.理解与demo
2.1 二阶低通滤波
2.1.1 LP_2Order的个人理解
低通滤波比较常用,原理不甚了了,至于为什么用二阶而不用一阶三阶一百阶,你懂的。
很容易理解也很容易做,照着公式写就行,下一节会给出参考链接。
要实现二阶低通滤波器,有几个很重要的概念,也是必要的参数,一定要掌握并知道怎么赋值,这些也是《自动控制原理》课程里讲到的传递函数里面的概念:
阻尼比epsilon、截止频率、采样时间T。
阻尼比一般就是,截止频率看你想让不超过多大频率的信号通过了,采样时间就是你的功能的执行周期。
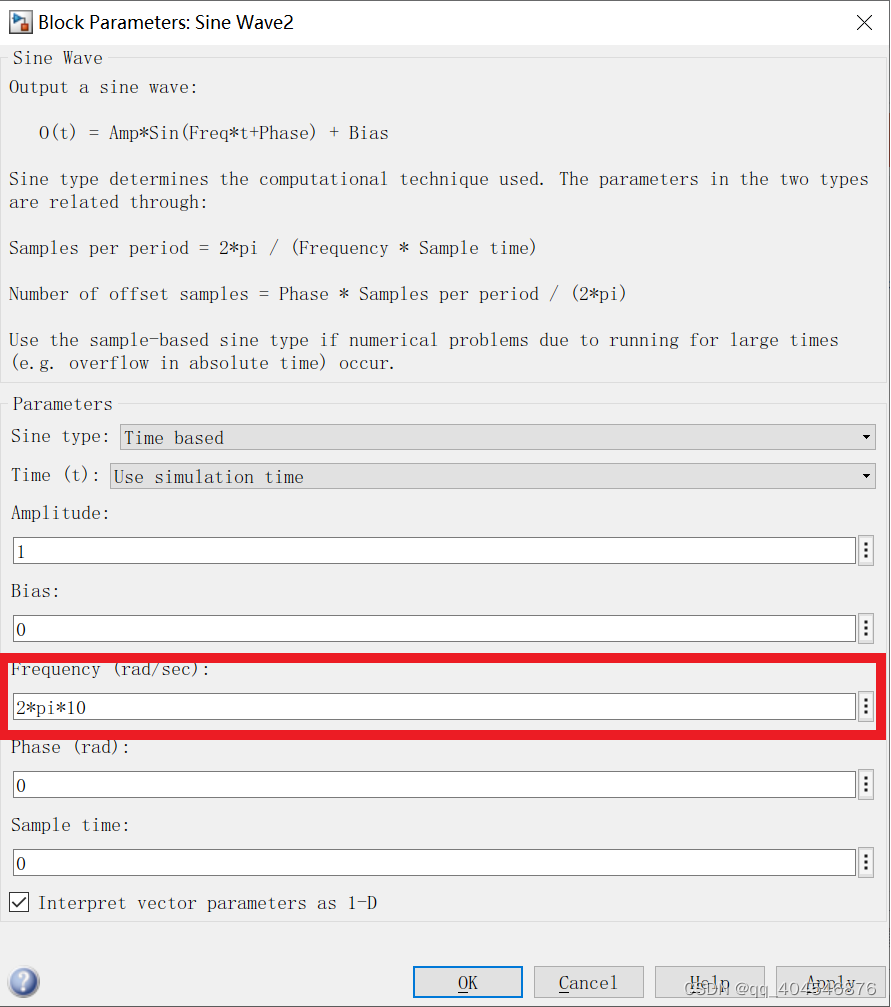
要特别注意的是,这里边提到的频率,包括matlab中的实现,都是rad制,而通常我们拿到的都是s制的采样时间T或者Hz制的频率f,这里要注意做转换:
看下matlab中的sine wave模块,注意Frequency参数那里的单位是rad/sec,所以你如果想要个10Hz或者叫周期0.1s的正弦波,你得按图里我那样写:2*pi*10。
2.1.2 refer
下面几个链接是二阶的理论推导还有人家写的demo代码,借鉴度很高,致谢。
二阶滤波器原理及算法程序_tuxinbang1989的博客-CSDN博客_二阶滤波算法
数字二阶低通滤波器公式推导及代码实现_苏箭的博客-CSDN博客_二阶低通滤波器公式
2.1.3 demo
代码奉上,很简单,对着上边的讲解一看便知。
function y = fcn_filter_Order2(x, omega_c, epsilon, Tsw)
%二阶低通滤波器,采样频率50Hz,截止频率暂定f=50Hz
%ω=2*pi*f
b0 = omega_c*omega_c * Tsw*Tsw;
a0 = b0 + 4*epsilon*omega_c*Tsw + 4;
a1 = 2*b0 - 8;
a2 = b0 - 4*epsilon*omega_c*Tsw + 4;
persistent p_x;
if isempty(p_x)
p_x = zeros(2,1);
end
persistent p_y;
if isempty(p_y)
p_y = zeros(2,1);
end
y = (b0*x + 2*b0*p_x(1) + b0*p_x(2) - a1*p_y(1) - a2*p_y(2)) / a0;
p_x(2) = p_x(1);
p_x(1) = x;
p_y(2) = p_y(1);
p_y(1) = y;
2.2 卡尔曼滤波
2.2.1 理解
kalman filter,神一般的存在,究其本质也是一种低通滤波,甚至极端场景下退化成加权平均,所以不用害怕,花时间啃一啃就懂了。
首先,经典五部曲奉上:
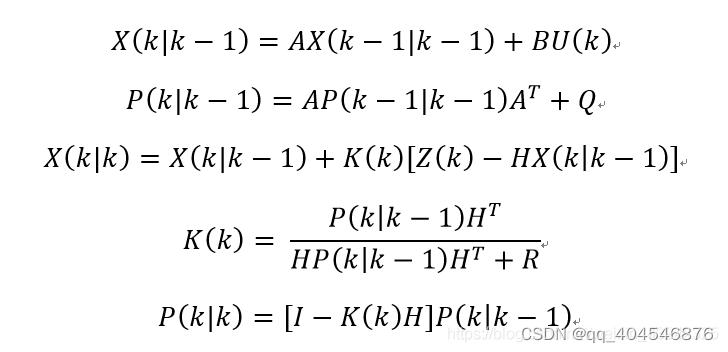
- 第一步,利用上一次的KF结果,根据模型预测/估计当前状态。这个是篇理论的模型计算,要对功能建模的,比如经典的
,一定要有个这样的公式,哪怕近似也要近似个出来,把AB矩阵造出来;
- 利用上一次的KF协方差计算当前预测/估计协方差;
- 利用步骤2得到的协方差更新KF增益K,图中公式3、4的顺序颠倒了,怎么可能KF都完了才去计算K;
- 利用步骤3得到的KF增益K,结合步骤1里的预测/估计值和当前测量值,做滤波,本次卡尔曼滤波状态最优估计结束;这里有个测量的概念,就是对状态量一下子,比如步骤1里根据模型/公式估计出来走了1米,你噶尺子一量走了9.99米,这个9.99米就是测量值,这是现实世界中物理看得见摸得着的东西,不说人话叫“观测量”;
- 最后一步,为了下一循环能继续,需要更新本轮KF最优估计的协方差,over。
2.2.2 refer
参考1:卡尔曼滤波理论
卡尔曼滤波原理详解及系统模型建立(simulink)_Donald�的博客-CSDN博客_卡尔曼滤波simulink
参考2:C代码实现,一维版、矩阵版都有
卡尔曼(Kalman)滤波算法原理、C语言实现及实际应用_Beyonderwei的博客-CSDN博客_kalman算法卡尔曼滤波C语言实现(矩阵版)_Fly_Into_The_Sky的博客-CSDN博客_卡尔曼滤波c语言jjd卡尔曼(Kalman)滤波算法原理、C语言实现及实际应用_Beyonderwei的博客-CSDN博客_kalman算法
矩阵版这个NB大了,还有均匀分布随机数、正态分布随机数 ,可飨!
参考3:一个无敌的讲解,怎么就这么6!
【卡尔曼滤波器】1_递归算法_Recursive Processing_哔哩哔哩_bilibili
2.2.3 卡尔曼滤波的几个tips
- 状态转移矩阵A、观测矩阵H,一般都是单位阵;
- 初始建立,没有“上一次的KF协方差”,这时候差不多给个数就行了,别太大太小别是0,据说随着迭代的进行收敛很快,初值影响不大;
- 对于某些场景,鉴于矩阵乘法的行列特性,B矩阵构造不出来可不予构造,因为B仅在估计的时候使用,可直接用相关公式计算,在其它几个KF算式中用不到B。
2.2.4 demo
为了提高通用性,做了个4维的demo ,不过没考虑控制。
function y = KalmanFilter(measure)
%卡尔曼滤波,通用矩阵形式,未考虑控制u
%measure为当前时刻新的观测值,y为本次KF输出
%维数先固定好
dim = 4;
persistent p_y;
if isempty(p_y)
p_y = zeros(dim,1);
end
persistent p_p;
if isempty(p_p)
p_p = eye(dim)*0.01;
end
% A = eye(dim);
% B = zeros(dim,1);
% H = eye(dim);
Q = eye(dim)*0.01;
R = eye(dim)*0.01;
X_predict = p_y; % 公式1,根据上一步最优结果预测当前状态,A为单位阵,不考虑U
p_predict = p_p + Q; % 公式2,根据上一步最优结果的协方差计算当前预测状态协方差,Q为过程噪声协方差,A为单位阵
K = p_predict / (p_predict+R); % 公式3,计算KF增益K,测量矩阵H为单位阵,R为测量噪声协方差
y = X_predict + K*(measure-X_predict); % 公式4,计算最优输出,H为单位阵
p_p = (eye(dim)-K) * p_predict; % 公式5,计算本次最优结果的协方差,供下一步迭代使用
p_y = y; % 保存本次最优结果,供下一步迭代使用
3.其它
滤波的方法很多,经典的还有中值滤波什么的。
滤波的一大问题:实时滤波会带来相移(后处理没这个问题),时域上看滤波结果会比输入数据有延迟。以一维中值滤波为例,假定滤波窗口大小为5,做实时滤波,假设当前数据是,那么前边几帧的数据是
、
、
、
、
...,此时做滤波实际滤的是
不是
,因为用到的数据是
,
才是中位数据,即延迟两帧,滤波窗口再大,比如我测试过31,很明显就能从波形图上看到一段滞后。
均值滤波会平滑但也导致模糊,并无法去除噪声的影响,滤波结果中糅杂了噪声;参考中值滤波做均值滤波改进,即增加排序、去掉最大值最小值的操作,然后对剩余点做平均,能一定程度上降低噪声的影响。
中值滤波主要为去噪,不是为平滑。

















 653
653

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









