






点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达一.焦距的测量
1. 放大倍率法测焦距

被测光学系统放置在已知焦距为f0的平行光管的物镜前,平行光管物镜焦平面上放置玻罗板(一组已知刻线间隔的精密分划板);在被测光学系统焦面上用显微镜瞄准玻罗板的像,设玻罗板某一对线宽为d,在被测光学系统的焦面上所成像的线宽为d`,则被测系统的焦距f为

平行光管的焦距f0为被测光学系统的焦距f的3~5倍。
2. 精密测角法测焦距
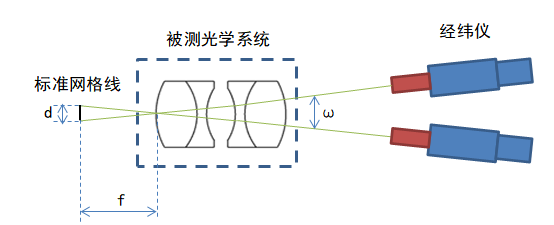
分划板放置在被测平行光管的焦面上,经经纬仪放置在被检光学系统的前面,用经纬仪测量某一线对(线对宽度为L)对应的夹角为ω,则被测光学系统的焦距f为

二.视场的测量
1. 运用精密测角装置测量视场
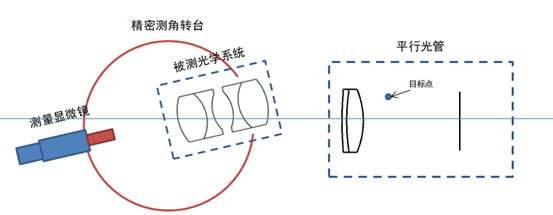
将测量显微镜放置在被测光学系统的像方并与被测光学系统一并安放在转台上。被测光学系统的物方安放带目标点的平行光管。将转台转到一边缘能看到目标像,记下转台的角度值ω1,再转到另一边缘能看到目标像,记下转台的角度值ω2,则被测光学系统的视场为
2. 运用大视场平行光管测量视场
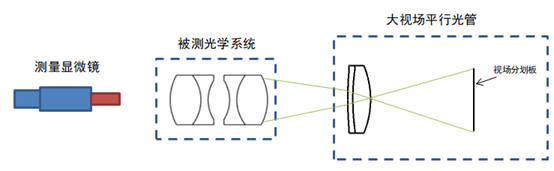
大视场平行光管主要用于角度测量,在大视场平行光管的焦面处放置一刻有角度值的分划板。检测视场时,将被测光学系统瞄准大视场平行光管,能看清分划板上标有的视场角度值,就是被测光学系统的视场。
三.像质的测量
1. 分辨率的检测
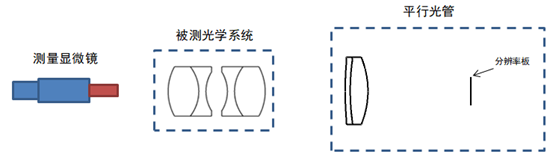
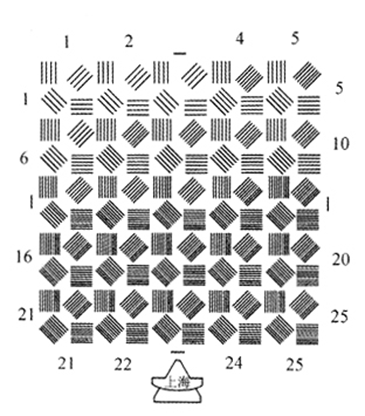
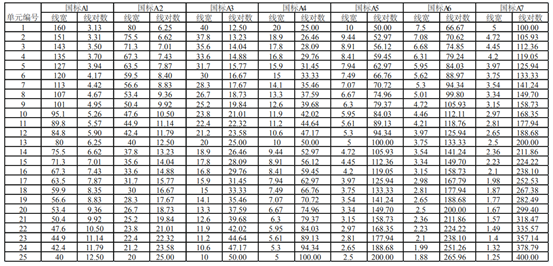
照相系统空间分辨率用平行光管加分辨率板进行测量。在平行光管的焦面上放置对应板号的栅格分辨率板,在平行光管的物方放置被测光学系统,在被测光学系统的像方用测量显微镜观察,能将分辨率板最小栅格四个方向上的条纹看清楚,记下分辨率板板号和单元号,再查表找到相应的条纹线宽b和空间频率N0。
被测光学系统的空间分辨率N可表示为
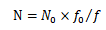
上式中,f0为平行光管的焦距,f为被测光学系统的焦距。
被测光学系统的角分辨率α为
分辨率检测还用到了其他很多种分辨率板,也可以定制分辨率板。
2. 畸变检测
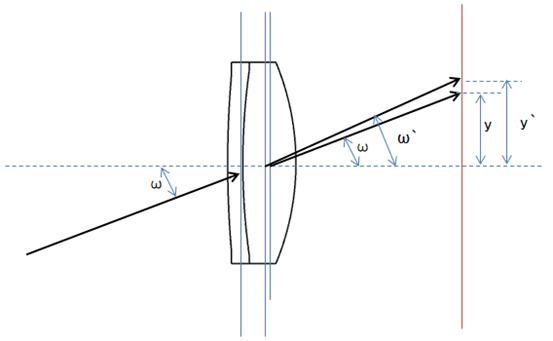
对于无限远视场角为ω的目标经被测光学系统后成像在焦面F处,对应的像高为y`,若近轴焦距为f,相应的理论像高y为

则绝对畸变δd为
视场角ω定义了光学系统的实际焦距f`,则有
畸变δd为
上式表明,畸变定义为各视场角下实际像高与理论像高的差值,同时也可定义为各视场角下实际焦距与近轴理论算出的焦距的差值。
畸变的检测方法有两种:
一种是按被测光学系统工作光路的逆向光路检测畸变;
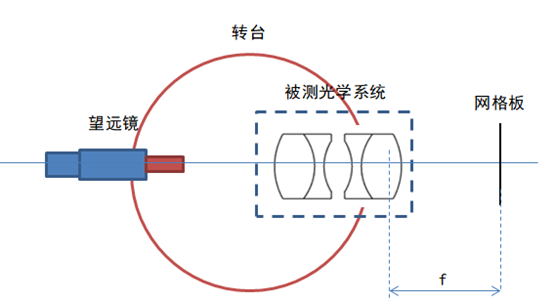
另一种是按被测光学系统工作光路方向检测畸变。
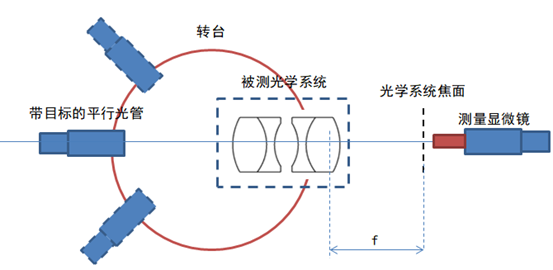
这两种检测方法只是检测光路相反,在畸变计算上是一样的。
3. 星点检测法
由于任意物的分布都可以看成无数个具有不同强度的、独立发光点的集合;任意物的像就是这无数个星点像的集合。因此,星点像的光强分布函数就决定了该系统的成像质量。
另外,星点像的光强分布比较易于描述,所以星点检测法是检测成像光学系统质量时最基本、最简单的一种方法。
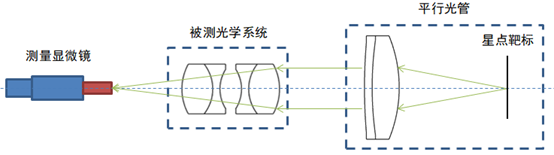
光源通过聚光镜照亮位于平行光管焦面的星点板小孔,从平行光管出射的平行光经待测物镜,在其焦面上成像,然后用目镜(测量显微镜)对所成的像进行观察。
根据星点衍射图的特征准确可靠地判断光学系统的像质及影响像质的主要因素。
星点检测法对检测人员要求比较高,除了要求检测人员掌握星点检测的基本原理外,还必须了解单独具有某种像差或缺陷的星点衍射镜的特征。
星点检测法可以检测光学系统的共轴性、球差、位置色差、彗差、像散及其客观存在的工艺。
随着CCD和计算机技术的发展,光学图像数字化已成为现实,可以用计算机采集星点图像,而且可以同时再现焦前、焦面和焦后的星点图像,判断像差的性质与大小。
4. 干涉仪法
光学系统的波像差是指通过被检光学系统后的实际波面相对于理想波面的偏差,最常用的测量方法为干涉法。
干涉法的原理为被测光学系统的实际波面与参考波面(理想波面)之间相互干涉,从干涉图中求出实际波面的形状和理想波面的偏差。
参考波面(理想波面)可有参考镜产生,如泰曼-格林干涉仪、菲佐干涉仪;
参考波面由像面上小孔衍射形成,如点衍射干涉仪;
参考波面由被测光学系统本身不同部分产生,如波面剪切干涉仪。
5. 哈特曼法测量
几何像差是指测量被检光学系统对不同色光、不同视场、不同入射高度的细光束在光轴上交点位置来评价成像质量,较常用的方法为哈特曼法。
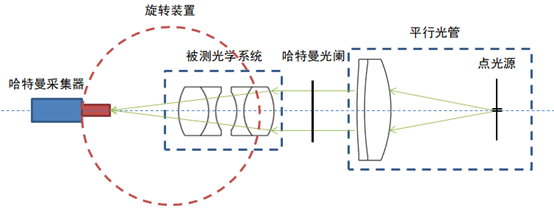
哈特曼法是检测远摄光学系统几何像差的常用方法,其特点是借助一米字形排列的小孔光阑,在被检光学系统的物方形成采样光束,在被检光学系统的焦面用哈特曼采集器采集焦前、焦后两截面的光斑间距确定成像系统的像差。
哈特曼法可检测光学系统的球差、位置色差、彗差、场曲和像散。
四.光学传递函数的测量
光学传递函数是指以空间频率为变量,表征成像过程中调制度和横向位移的相对变化的函数。
光学传递函数是光学系统对空间频谱的滤波变换。
一个非相干照明的光学成像系统,像的强度也是线性的,满足叠加原理。
观察到的各类物体,通过光学仪器(如照相机、显微镜、望远镜)和光学系统看到、探测到的图像和目标,通过CCD、CMOS等获得的图形、图像,具有颜色和亮度两个重要的参数。
一幅单色光图像总是由缓慢变化的背景,粗大的物体和急剧变化的边缘、局部细节构成。
傅里叶光学中用空间频率v来描述光强变化的快慢程度,把图像中缓慢变化的成分看作图像的“低频”,而把急剧变化的成分看作图像的“高频”,单位是mm-1,即每毫米中光强变化的周期数。
空间频率等于0表明图像中没有光强变化(如一张白纸)。
一幅图像中既有零频分量,又有非零频分量,后者包含了各种空间频率的分量。
零频分量代表平均光强,称图像的直流分量;非零频分量又称图像的交流分量。
光学成像系统对于各种空间频率成分的传递性能反映了该系统的成像质量,可借助于系统对于不同空间频率余弦光栅的传递特性来表征。
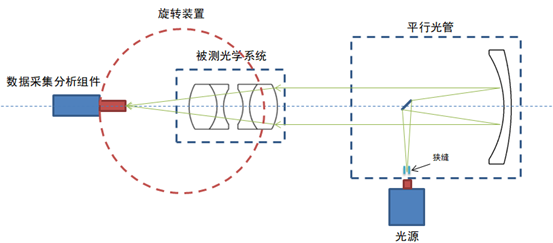
测量时,先将被测光学系统放置在调整装置上,调整被测光学系统使光轴与平行光管的光轴重合,旋转装置的转轴与被测光学系统和入瞳中心(主点)重合,平行光管发出的光经被测光学系统后成像在数据采集单元上。
计算时,需要知道被测系统的焦距,然后根据平行光管和被测系统的倍率关系,求取狭缝在被测系统焦面的大小,此时需保证狭缝像的截止频率高于被测系统的截止频率。对数据采集分析组件的图像进行一次傅里叶变换,然后每个空间频率的幅值相对于零频归一化;再根据数据采集分析组件的放大倍率及CCD大小对横坐标进行赋值;最后狭缝的影响通过对MTF进行修正实现,最终修正值即为系统某一视场角位置一系列不同空间频率的MTF。
转动被测光学系统及数据采集单元,按上述方法测量另一视场角位置不同空间频率的MTF。
本文仅做学术分享,如有侵权,请联系删文。
好消息!
小白学视觉知识星球
开始面向外开放啦👇👇👇
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









