







上次说了cartographer的基本配置及如何跑起来,今天就说说它的处理流程,先来一个框架图(自己画了一遍,理解了一下):
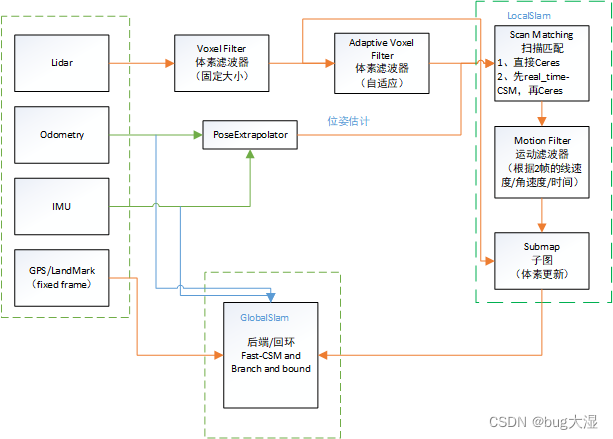
处理流程
多传感器(lidar、imu、odom)作为数据源,首先将IMU数据和里程计给位置外推器,为接下来的相关性匹配提供初始值。同时,激光雷达点云经过体素滤波器进行处理,进行SLAM前端的匹配(ceres)。如果,位置外推器此时没有提供位姿初始值,应该使用相关性匹配(CSM)进行初值的计算,在进行ceres匹配。 接下来根据一系列策略更新submap。
后端采用fastCSM+分支定界加速(基于多分辨率地图),进行回环检测,最后将所有约束条件(这里我认为GPS应该也是为后端提供了约束),进行非线性最小二乘优化。
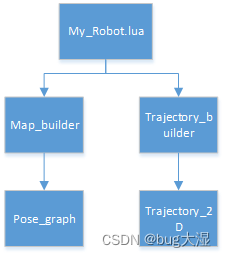
配置文件结构如下,没啥好说的:
位姿外推器
对于激光匹配,首先要有一个初始的位姿,在此基础上进行优化:有IMU,则采纳其角速度积分作为初始姿态,不信任IMU任何加速度信息;有里程计,则采纳里程计的线速度积分作为初始平移; 二者都没有,则根据匀速运动模型预测。
==》可以看出,cartographer的多传感器融合是一个松耦合,主要依赖激光来定位。IMU和里程计数据并没有被构建到真正优化的目标函数中。
注意:松耦合imu的SLAM框架,imu部分一般都是没有真正构建到优化的目标函数之中的;紧耦合,eg:lio_sam,则是采用imu预积分的形式,将imu信息一同构建到优化函数中。
相关扫描匹配
构建似然场。即对原先的地图进行高斯模糊,让它膨胀一些,然后把激光在一个搜索窗口内暴力匹配,计算得分(前端是在小窗口内进行匹配,后端因为要与大地图匹配,采用了分支定界加速)。
-得分如何计算?
如果scan的点落在障碍物模糊区域内,落的越多,得分越高。
-地图不是无限大的吗,你怎么保证在搜索窗口里就能找到位姿呢?
因为有初始位姿。误差肯定在一个范围内而不会马上发散到很远,所以可以在一个位姿的窗口内,对位姿进行暴力匹配搜索。
这部分在前端是可以选择不开启的。(算力要求高)
非线性优化(前端)
CSM解算中,暴力搜索如果设置的搜索窗(步长)不合适,会造成累计误差。eg:如果角度步长设为1度,但如果刚好真正的角度是5.5度,那么CSM只能搜索到5或6度,而无法进一步细化,逐步累积将会造成误差。 因此,引入前端引入非线性优化ceres;
在配置文件中调参:
2D:三个误差项:位姿转换误差+ 旋转惩罚+平移惩罚 ,后二者限制了旋转和平移的修改不能距离初始位姿太大(越相信初始位姿,设置越大)。
3D:四个误差项:低分辨率位姿转换误差+ 高分辨率位姿转换误差+旋转惩罚+平移惩罚。低分辨率位姿转换误差权重低于高分辨率。
分支定界
非线性优化(后端)
前端不断维护当前激光帧与submap的位姿,后端在维护每个submap的位姿,也是构建图优化模型(Ceres)去调整个个submap的位姿,使它尽量满足约束(前端位姿约束、回环约束、gps观测约束)。















 7193
7193











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









