







分享自己几个月以前从零开始搭建的激光slam框架,imu+lidar+gps松耦合,框架扩展性比较好。特地分享出来大家相互交流学习(麻雀虽小、五脏俱全):
qqngwzlb/0_1SLAM (github.com)![]() https://github.com/qqngwzlb/0_1SLAMgit克隆地址: git@github.com:qqngwzlb/0_1SLAM.git
https://github.com/qqngwzlb/0_1SLAMgit克隆地址: git@github.com:qqngwzlb/0_1SLAM.git
代码主要模块:
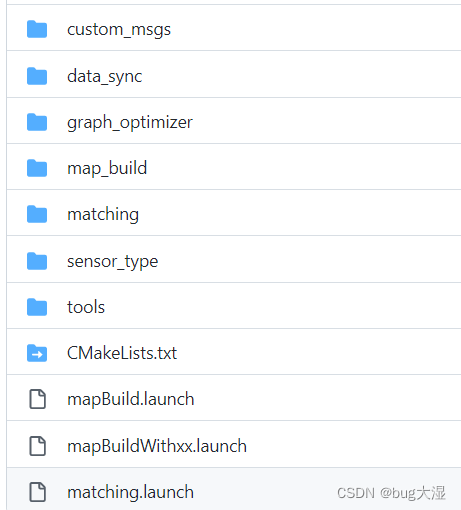
custom_msg: 自定义消息/服务类型;
data_sync: 数据预处理节点(畸变之类);(跑kitti直接不用启动这个节点,kitti是做好畸变和数据对准的);
graph_optimizer: 后端优化库;
map_build: 前端里程计、后端优化、回环检测三大模块;
matching:用于已知地图的匹配;
sensor_type:自定义便于内部传输的传感器消息类型;
tools:通用的工具类;
参考的任大佬的博客(在此特别感谢!!!),自己从零开始搭,对代码框架进行的大肆修改(面目全非,哈哈,按照自己的意思分的模块,改成了自己喜欢的模样),自己增加了很多功能,比如,离线构建地图offlineComposeMap.sh等;
代码主要基于:ros1、pcl、eigen、g2o等库。欢迎大家相互学习交流,新手建议大家还是自己搭建一遍,了解激光SLAM的全貌。。。















 1581
1581











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









