






arduino 与ROS串口通信
1. 编写arduino通信程序
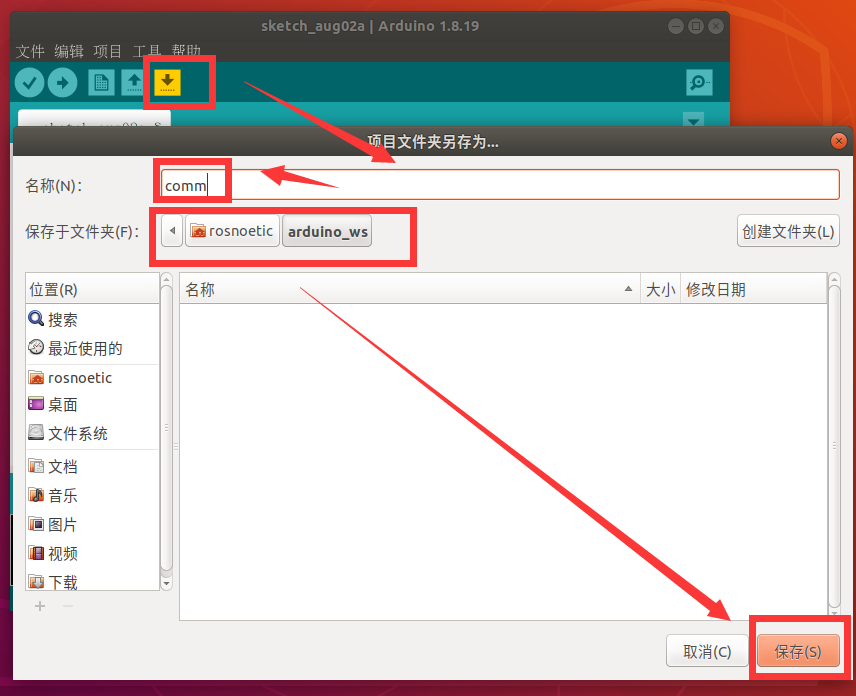
新建arduino代码管理空间,用于存放arduino的串口通信程序。
rosnoetic@rosnoetic-VirtualBox:~$ mkdir arduino_ws
需求:通过串口,由arduino向计算机发送数据
实现:
新建arduino文件
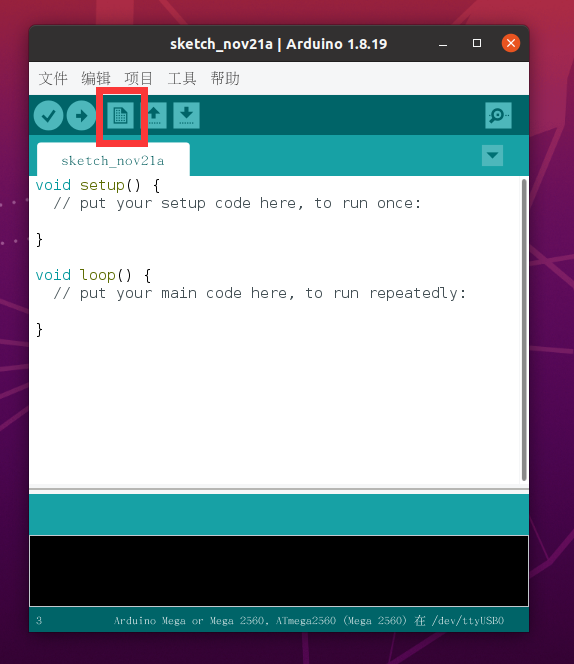
添加如下代码:
/*
* 需求:由arduino向PC发送数据:hello world
* 实现:
* 1.设置波特率
* 2.Serial.print()或println()发送数据
*/
//初始化
void setup() {
// put your setup code here, to run once:
// 设置波特率115200
Serial.begin(115200);
}
// 循环
void loop() {
// put your main code here, to run repeatedly:
// 延迟0.1s
delay(100);
// 打印信息
Serial.print("hello ");
Serial.println("world");
}
-
问答
问:9600的波特率每秒可以传输多少个字节?
答:波特率的单位是bit/s,表示1s的时间可以传输多少比特的数据,一个字节包含8bit(为什么是8bit呢,因为一个字节通常可以表示一个ASCII码),那么直观上来说9600的波特率表示每秒可以传输9600/8=1200的字节数。但是在串口通信传输中传输的不是字节流,而是数据包!所要传输的字节是包含在数据包中的,数据包中还包含了其余的辅助传输位。例如对于UART数据包,其含有1个起始位,数据位的个数一般是5到9个,一个可选的奇偶校验位以及1个或2个停止位,默认是。在UART数据包中起始位和停止位是必须的。那么在只有起始位和1个停止位的情况下,传输一个字节的数据包长度为10bits,在这种情况下,每秒传输的数据包个数为:9600/10=960个,实际上解析之后,收到了960个字节数。
保存为comm文件
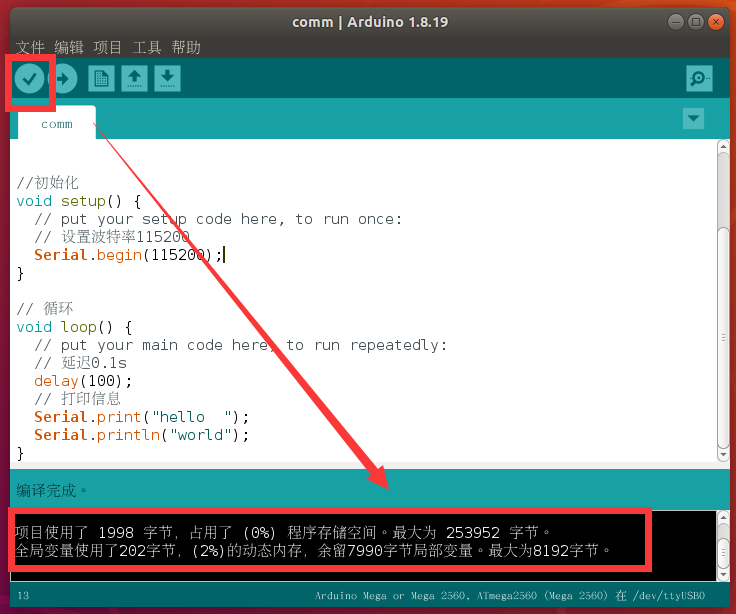
点击验证,没有红色的输出,则表示验证通过
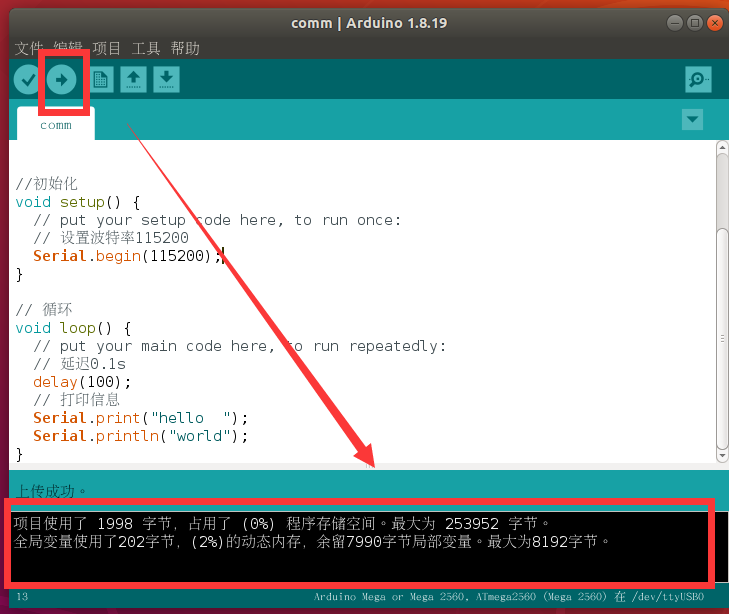
点击上传,没有红色的输出,则表示上传成功
打开串口监视器,选择115200波特率,即可查看得到相应的结果
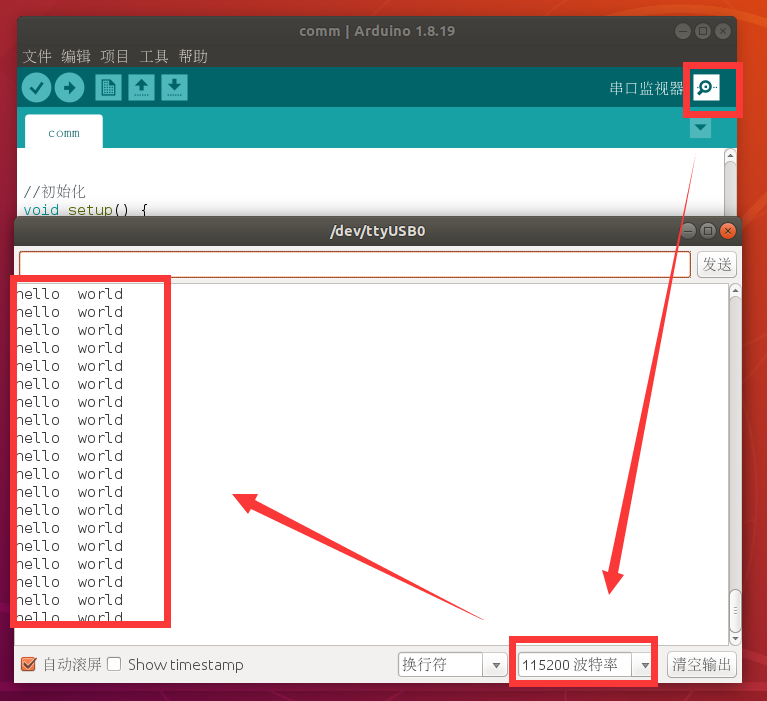
同时观察Arduino,可以看到RX灯在闪烁。
2. 编写上位机接收程序
2.1 创建 ROS 工作空间
rosnoetic@rosnoetic-VirtualBox:~$ mkdir -p communication/src
rosnoetic@rosnoetic-VirtualBox:~$ cd communication/
rosnoetic@rosnoetic-VirtualBox:~/communication$ catkin_make
-
catkin_make

2.2 启动 VSCode
rosnoetic@rosnoetic-VirtualBox:~/communication$ code .
2.3 VSCode 中编译 ROS
快捷键 Ctrl+Shift+B 调用编译,选择:catkin_make:build
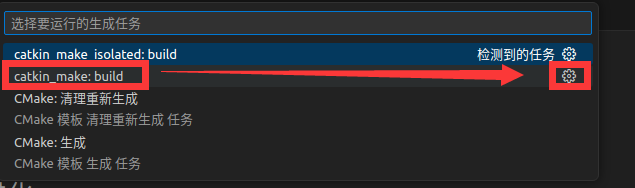
可以点击配置设置为默认
修改.vscode/tasks.json文件
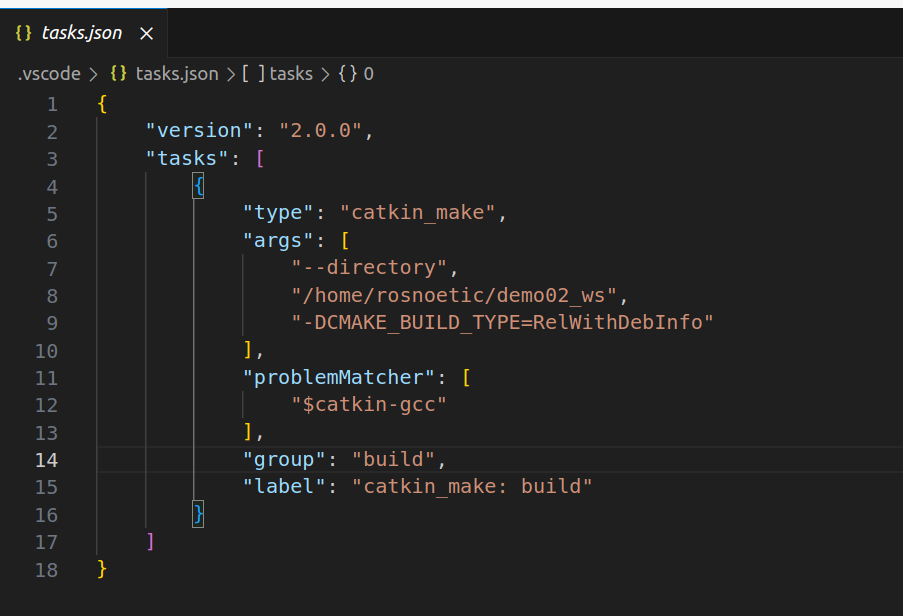
替换成如下内容:
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}

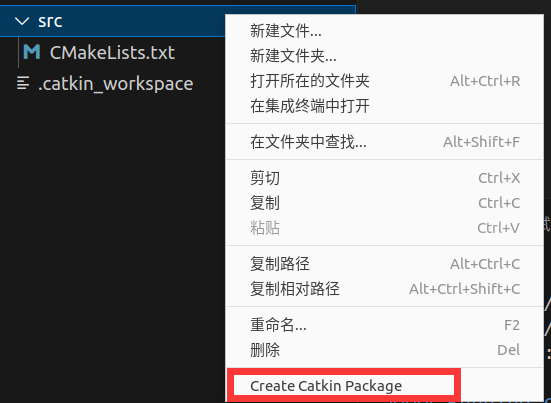
2.4 创建 ROS 功能包
右击工作空间下的src,选择“create catkin package “
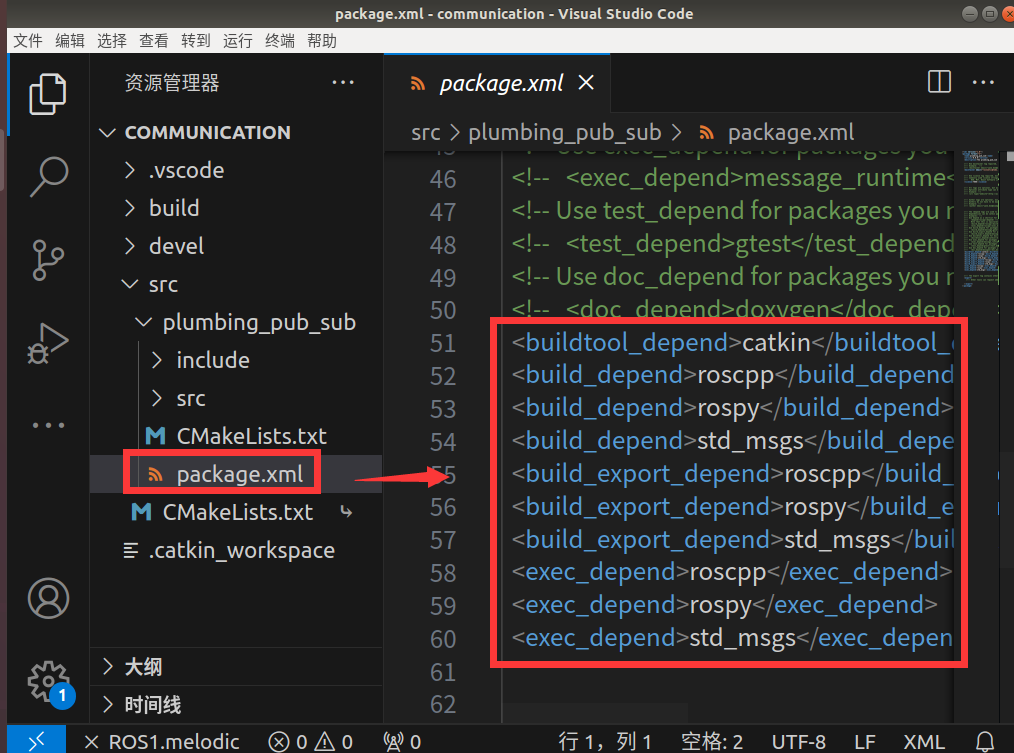
设置包名:plumbing_pub_sub

添加依赖:roscpp rospy std_msgs

2.5 python 实现
右击功能包plumbing_pub_sub ,选择”新建文件夹“
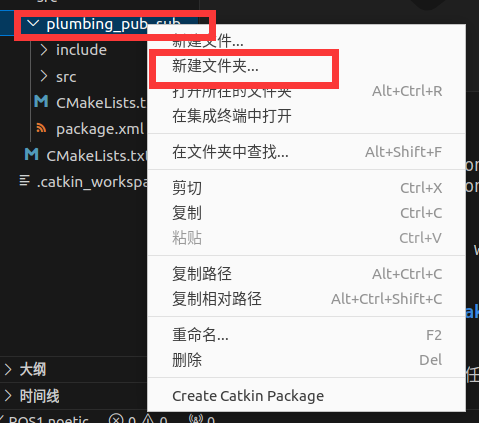
新建文件夹:scripts

右击scripts ,选择“新建文件”
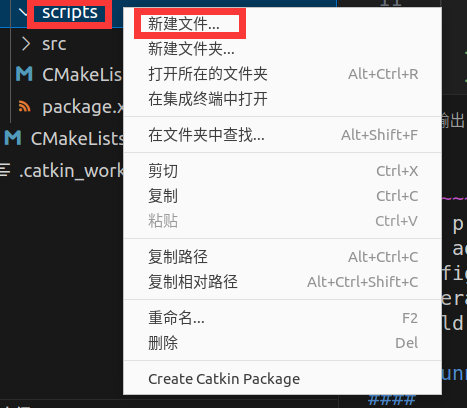
新建python文件:comm.py
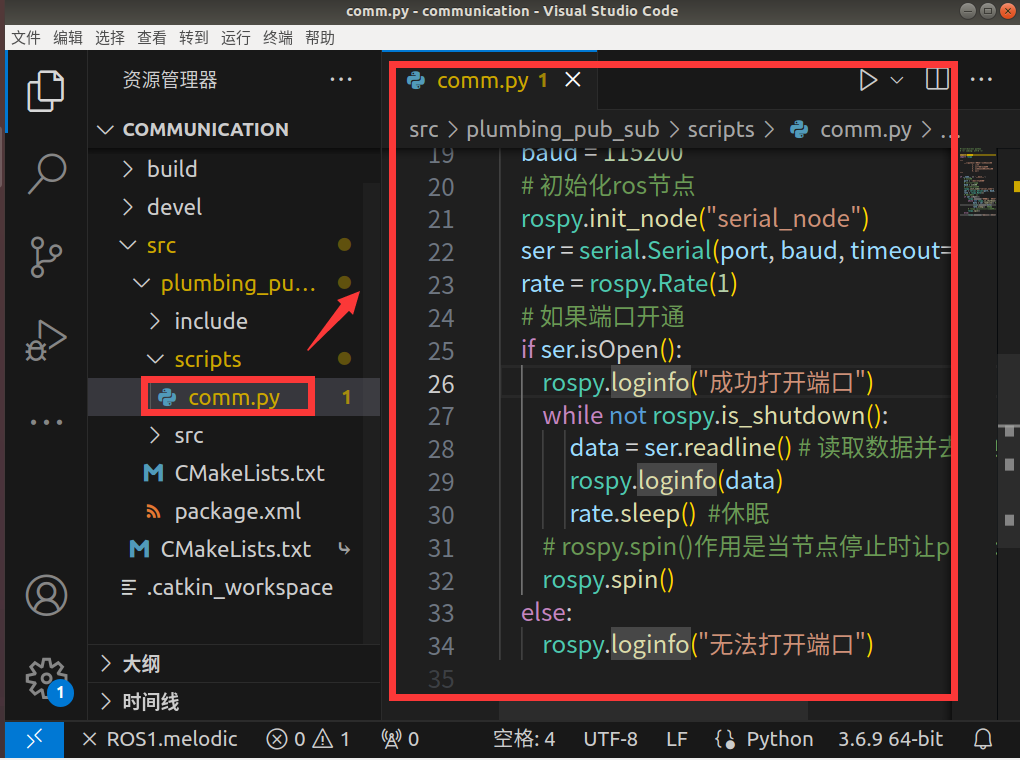
python文件中添加如下内容:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import serial
import rospy
"""
使用python实现下位机消息读取
1. 导包
2. 初始化ros节点
3. 读取串口数据并打印
4. 循环
"""
if __name__ == '__main__':
# 串口号
port = '/dev/ttyUSB0'
# 下位机波特率
baud = 115200
# 初始化ros节点
rospy.init_node("serial_node")
ser = serial.Serial(port, baud, timeout=0.5)
rate = rospy.Rate(1)
# 如果端口开通
if ser.isOpen():
rospy.loginfo("成功打开端口")
while not rospy.is_shutdown():
data = ser.readline() # 读取数据并去掉换行符
rospy.loginfo(data)
rate.sleep() #休眠
# rospy.spin()作用是当节点停止时让python程序退出
rospy.spin()
else:
rospy.loginfo("无法打开端口")
添加可执行权限
右击scripts,选择“在集成终端中打开”

修改 python 文件的可执行权限,在终端执行:chmod +x *.py
rosnoetic@rosnoetic-VirtualBox:~/communication/src/plumbing_pub_sub/scripts$ chmod +x *.py

2.6 配置 CMakeLists.txt
Python配置
修改功能包plumbing_pub_sub下的CMakeLists.txt
CMakeLists.txt 中找到如下部分:
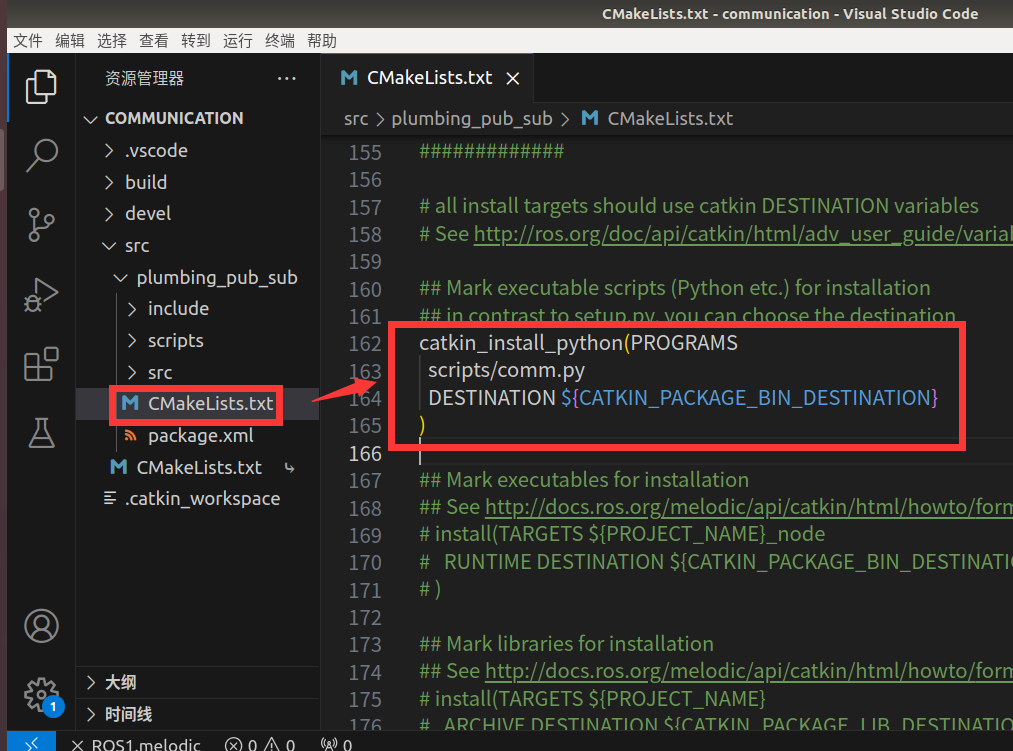
修改为如下内容
catkin_install_python(PROGRAMS
scripts/comm.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
2.7 编译执行
2.7.1 编译
ctrl+alt+T打开终端,执行如下指令进行编译:
rosnoetic@rosnoetic-VirtualBox:~$ cd communication/
rosnoetic@rosnoetic-VirtualBox:~/communication$ catkin_make
-
catkin_make
2.7.2 执行
将arduino连接上虚拟机,注意不要打开arduino串口监视器,因为串口只能给其中的一方发送数据。
ctrl+alt+T打开终端,执行如下指令启动 ros 核心
rosnoetic@rosnoetic-VirtualBox:~$ roscore
ctrl+alt+T打开新的终端,重新刷新我们的环境变量
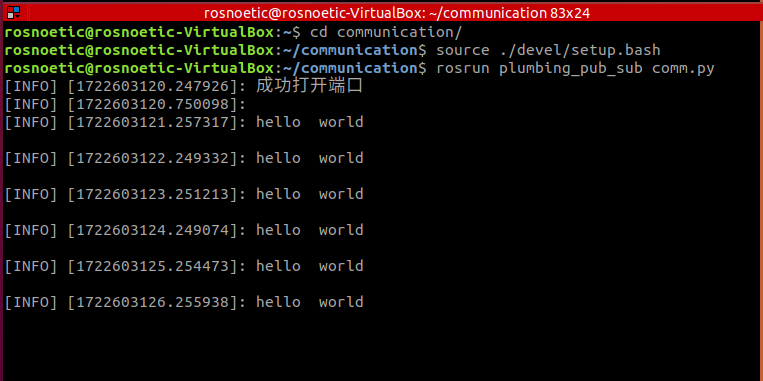
rosnoetic@rosnoetic-VirtualBox:~$ cd communication/
rosnoetic@rosnoetic-VirtualBox:~/communication$ source ./devel/setup.bash
rosnoetic@rosnoetic-VirtualBox:~/communication$ rosrun plumbing_pub_sub comm.py
即可看到如下图所示的hello world输出















 4249
4249

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









