







 本文介绍了狄洛尼三角剖分的概念、特性及生成算法,包括Lawson算法和Bowyer-Watson算法。此外,还提及了与之相关的沃罗诺伊图,它在多个学科中有广泛应用。最后,提到了openCV库在实现这些算法上的应用。
本文介绍了狄洛尼三角剖分的概念、特性及生成算法,包括Lawson算法和Bowyer-Watson算法。此外,还提及了与之相关的沃罗诺伊图,它在多个学科中有广泛应用。最后,提到了openCV库在实现这些算法上的应用。
一,狄洛尼三角剖分
1.1 三角剖分(triangulation)
给定平面上的一组点,将平面细分成以这些点为顶点的三角形。
假设V是二维实数域上的有限点集,边e是由点集中的点作为端点构成的封闭线段,E为e的集合。那么该点集V的一个三角剖分T=(V,E)是一个平面图G,该平面图满足条件:
(1)除了端点,平面图中的边不包含点集中的任何点。
(2)没有相交边。
(3)平面图中所有的面都是三角面,且所有三角面的合集是散点集V的凸包。
1.2 狄洛尼三角剖分(Delaunay Triangulation)
狄洛尼三角剖分准则
1)空圆特性:狄洛尼三角网是唯一的(任意四点不能共圆),在狄洛尼三角形网中任一三角形的外接圆范围内不会有其它点存在。
2)最大化最小角特性
在散点集可能形成的三角剖分中,狄洛尼三角剖分所形成的三角形的最小角最大。从这个意义上讲,狄洛尼三角网是“最接近于规则化的”三角网(在两个相邻的三角形构成凸四边形的对角线,在相互交换后,两个内角的最小角不再增大)。
3)狄洛尼三角剖分特性
(1)最接近:以最接近的三点形成三角形,且各线段(三角行的边)皆不相交。
(2)唯一性:不论从区域何处开始构建,最终都将得到一致的结果。
(3)最优性:任意两个相邻三角形构成的凸四边形的对角线如何可以互换的话,那么两个三角形六个内角中最小角度不会变化。
(4)最规则:如果将三角网中的每个三角形的最小角进行升序排列,则狄洛尼三角网的排列得到的数值最大。
(5)区域性:新增、删除、移动某一个顶点只会影响邻近的三角形。
(6)具有凸边形的外壳:三角网最外层的边界形成一个凸多边形的外壳。
4)生成狄洛尼三角剖分的算法
Lawson算法:
逐点插入Lawson算法是Lawson在1977年提出的。该算法思路简单,易于编程实现。
(1)建立一个大的三角形或多边形,把所有数据点包围起来;
(2)向其中插入一点,该点与包含它的三角形三个顶点相连,形成三个新的三角形;
(3)逐个对它们进行空外接圆检测,同时用LOP进行优化,即通过交换对角线的方法来保证所形成的三角网为狄洛尼三角网。
Bowyer-Watson算法:
目前广泛采用的生成狄洛尼三角剖分的算法是Bowyer-Watson算法,这是一种逐点插入方式生成狄洛尼三角网的算法,主要步骤如下:
(1)建立初始三角网格:针对给定的点集V,找到一个包含该点集的矩形R,称R为辅助窗口。连接R的任意一条对角线,形成两个三角形,作为初始狄洛尼三角网格。
(2)逐点插入:假设已经有一个狄洛尼三角网格TT TT,在其内部再插入一个点P,找到点P所在三角形。从P所在的三角形开始,搜索该三角形的邻近三角形,并进行空外接圆检测。找到外接圆包含点P的所有的三角形并删除这些三角形,形成一个包含P的多边形空腔,称之为狄洛尼空腔。然后连接P与狄洛尼腔的每一个顶点,形成新的狄洛尼三角网格。
(3)删除辅助窗口R:重复(2),当点集V中所有点都已经插入到三角形网格中后,将顶点包含辅助窗口R的三角形全部删除。
1.3 沃罗诺伊图
沃罗诺伊图(Voronoi Diagram,也称作Dirichlet tessellation,狄利克雷镶嵌)由俄国数学家格奥尔吉·沃罗诺伊建立的空间分割算法。灵感来源于笛卡尔用凸域分割空间的思想。在几何,晶体学建筑学,地理学,气象学,信息系统等许多领域有广泛的应用。
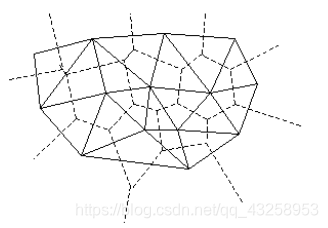
对三角剖分中的所有三角形各边做垂直平分线,将各相邻三角形三边的垂直平分线的交点(即外接圆圆心)连接起来得到一个多边形,称这个多边形为沃罗诺伊图。
二,openCV的代码实现
# !/usr/bin/python
import cv2
import numpy as np
import random
import dlib # 人脸识别的库 dlib
# Check if a point is inside a rectangle
def rect_contains(rect, point):
if point[0] < rect[0]:
return False
elif point[1] < rect[1]:
return False
elif point[0] > rect[2]:
return False
elif point[1] > rect[3]:
return False
return True
# Draw a point
def draw_point(img, p, color):
cv2.circle(img, p, 2, color, -1, cv2.LINE_AA, 0)
# Draw delaunay triangles
def draw_delaunay(img, subdiv, delaunay_color):
triangleList = subdiv 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1875
1875

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









