






一、创建工作空间
1、新建文件夹
2、在工作空间中创建src文件夹
3、进入src文件夹,打开终端
4、输入 catkin_init_workspace 初始化工作空间,产生一个文件,告诉系统这是一个工作空间
5、回到总文件(src上一级),使用指令catkin_make进行编译,产生 build,devel(存放可执行文件),在进行编译的时候,注意python版本的对应问题,如果是安装了anaconda,则版本较高,需改成python2.7.12版本,方法是注释掉.bashrc里的相关路经
6、设置环境变量,让系统找到功能包 source devel/setup.bash(setup.zsh)
这种方法只适用于当前的终端,打开另一个终端时需要重新 source,为了解决该问题,可以打开.bashrc文件,在最后一行加入该命令行,代码如下:
(1)打开.bashrc vi ~/bashrc
(2) 编辑 进入编辑模式 o
(3) 输入代码 source setup.bash路径
(4) esc 退出编辑模式
(5) :wq 保存退出
7、查看功能包路经 echo $ROS_PACKAGE_PATH 出现刚开始创建的src路经
8、创建功能包
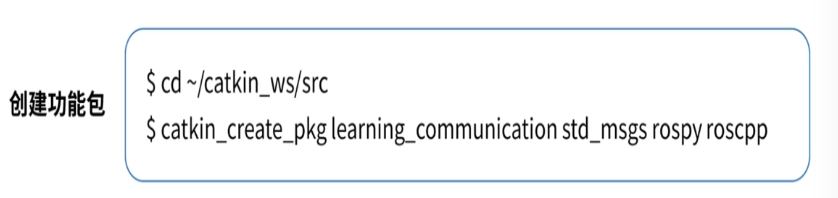

添加依赖,主要是包括该功能包用到的一些接口,完成后,src中产生如下:

9、编译功能包
 10、工作空间的覆盖
10、工作空间的覆盖
 在ros系统中,系统会根据ROS_PACKAGE_PATH中的路经寻找功能包,新创间的功能包会被放到最前面,使用:
在ros系统中,系统会根据ROS_PACKAGE_PATH中的路经寻找功能包,新创间的功能包会被放到最前面,使用:
env | grep ros 可以查看ros中的功能包路经,
如果想查看功能报包的路经,可以使用命令:rospack find 功能包
上述步骤主要是为了解决不同路经下相同功能包的问题















 3430
3430











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









