






以turtlesim功能包为例:
【STEP 1 】在package.xml文件中分别添加【编译】与【可执行】标签
<build_depend>turtlesim</build_depend>
<exec_depend>turtlesim</exec_depend>如下图: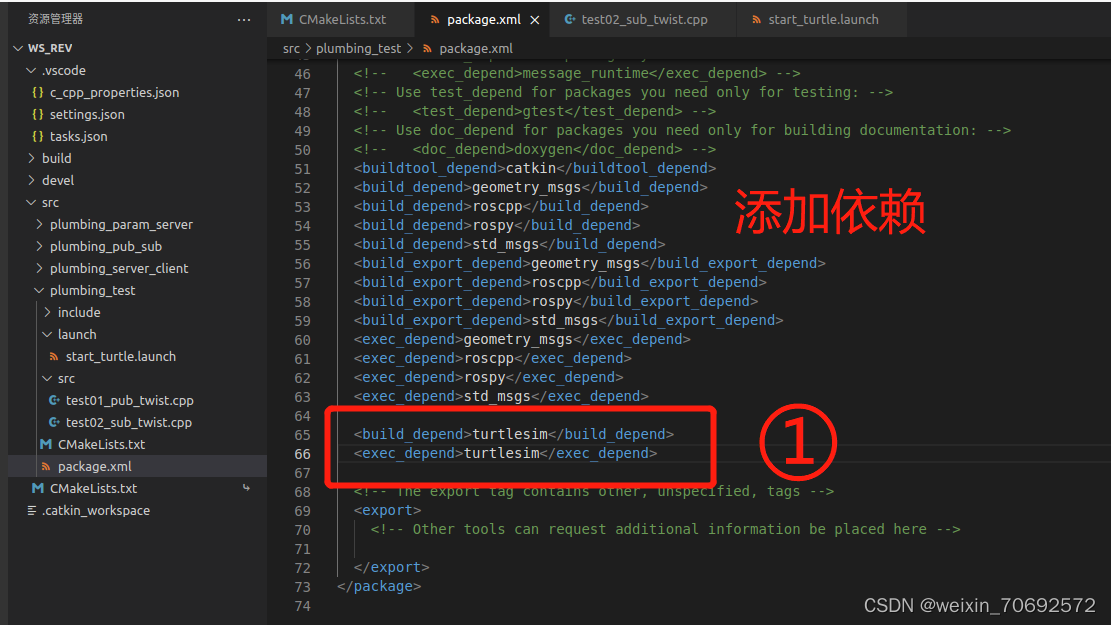
【STEP 2】在 CMakeLists.txt 文件 find package 中添加turtlesim功能包
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
std_msgs
turtlesim
)
如下图: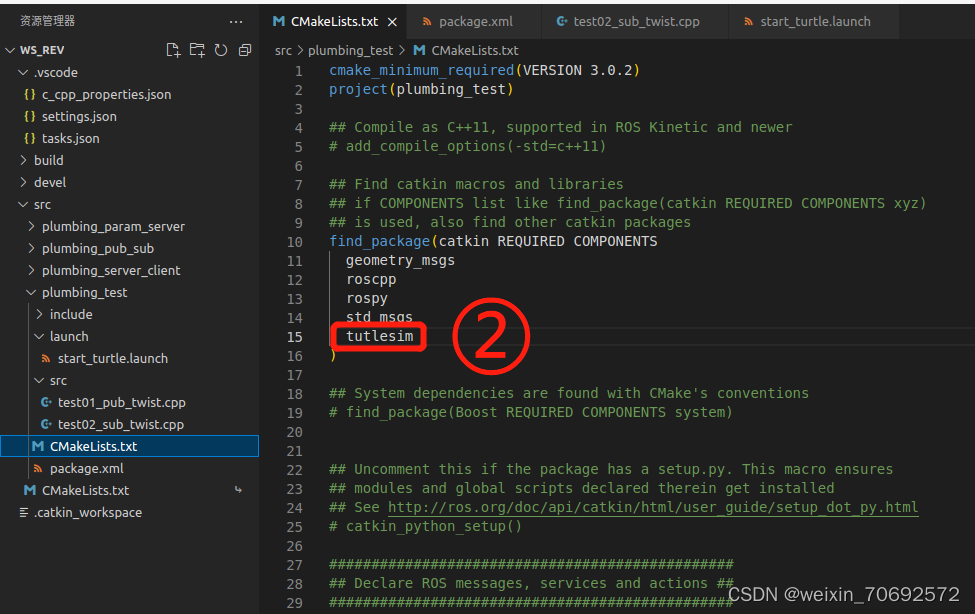















 140
140











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









