






Ceres::AutoDiffCostFunction拟合曲线
基本思路:通过生成带有高斯噪声的数据,学习使用ceres拟合曲线。
结论:AutoDiffCostFunction只能拟合一些低阶线性和非线性的曲线。
参考:
http://www.ceres-solver.org/nnls_tutorial.html#curve-fitting
//https://stackoverflow.com/questions/32889309/adding-gaussian-noise
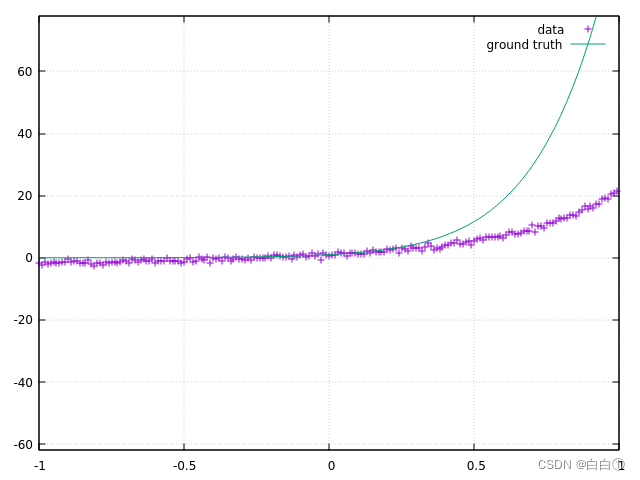
生成数据
在ground truth上加上噪声作为原始数据,曲线方程为 y = e 3 x + 2 s i n ( x ) y=e^{3x}+2sin(x) y=e3x+2sin(x)
#include<random>
\\...
const double mean = 0.0;
const double stddev = 0.5;
std::default_random_engine generator;
std::normal_distribution<double> dist(mean, stddev);
\\...
double y_=exp(3.0*x_)+2.0*sin(x_)+dist(generator);
构建ceres求解器
构建以ceres::AutoDiffCostFunction为求解方式的ceres求解器主要包含两个步骤:构建ceres::Problem对象、构建目标成本函数ceres::CostFunction
1)构建ceres::CostFunction
第一步是定义结构体,在结构体中重载括号运算符“()”,在重载函数中定义残差计算方式,实际上就是变量之间应该是什么样的关系,比如说要拟合的曲线的参数是 y = e a x + b s i n ( x ) y=e^{ax}+bsin(x) y=eax+bsin(x)中的 a a a和 b b b的值,那么结构体中的重载函数就直接写成 r e s i d u a l = y − [ e a x + b s i n ( x ) ] residual=y-[e^{ax}+bsin(x)] residual=y−[eax+bsin(x)]:
struct curve_fitting
{
curve_fitting(const double x,const double y):x_(x),y_(y){
}
template<typename T>
bool operator()(const T* const a,const T* const b,T* residual)const{
residual[0]=y_-exp(a[0]*x_)-b[0]*sin(x_);
return true;
}
private:
const double x_;
const double y_;
};
在这个地方我尝试了一些高阶的方程,发现都没有办法求解,可能是ceres::AutoDiffCostFunction只能求解一些低阶的方程。
2)构建ceres::Problem
有了函数对象,就可以结合函数对象和数据构建ceres的Problem类。
Problem problem;
for(int i=0;i<x_num;i++){
CostFunction * costf = new AutoDiffCostFunction<curve_fitting,1,1,1>(
new curve_fitting(data_x.at(i),data_y.at(i)));
problem.AddResidualBlock(costf,nullptr,&a,&b);
}
这里就解释了为什么在 1) 里面写结构体的时候需要定义两个私有成员变量x_ 和 y_,因为一共需要往Problem里面放x_num(x_num是数据的个数)个残差(residual),每一组残差由一组数据得到,那么x_ 和 y_ 就分别存放某一个残差对应的数据。
上述代码可以理解为ceres::AutoDiffCostFunction是ceres::CostFunction的一个派生类
CostFunction * costf = new AutoDiffCostFunction<curve_fitting,1,1,1>(
new curve_fitting(data_x.at(i),data_y.at(i)));
这部分代码可以理解为用 1) 中定义好的结构体作为模板,实例化一个AutoDiffCostFunction类,用AutoDiffCostFunction类实例化一个CostFunction类。
CostFunction * costf = new AutoDiffCostFunction<curve_fitting,1,1,1>(
^__实例化一个AutoDiffCostFunction类,以curve_fitting为模板,第一个1代表残差项个数为1,第二个1代表待优化变量1的个数为1,第三个1代表待优化变量2的个数为1
new curve_fitting(data_x.at(i),data_y.at(i)));
^__实例化一个curve_fitting类,构造函数列表参数为data_x.at(i)和data_y.at(i)
向ceres::Problem中放入构建好的CostFunction
problem.AddResidualBlock(costf,nullptr,&a,&b);
求解
求解过程主要的步骤是调用ceres::Solve方法,往其中传入求解对象(ceres::Problem)和求解过程中的一些配置,比如要用什么方法求解,求解过程中允许的最大迭代次数是多少,求解过程中是不是详细输出每一步的求解结果等等。
Solver::Options option;
option.minimizer_progress_to_stdout=true;
option.max_num_iterations=100;
option.linear_solver_type;ceres::DENSE_QR;
Solver::Summary summary;
Solve(option,&problem,&summary);
结果
代码
#include<ceres/ceres.h>
#include<iostream>
#include <random>
#include<fstream>
using ceres::AutoDiffCostFunction;
using ceres::CostFunction;
using ceres::Problem;
using ceres::Solve;
using ceres::Solver;
static int x_num=0;
std::string prefix_path{"/home/user/C++Project/ceres_use/data/"};
void generate_seq(std::vector<double>& x,std::vector<double>& y){
const double mean = 0.0;
const double stddev = 0.5;
std::default_random_engine generator;
std::normal_distribution<double> dist(mean, stddev);
//https://stackoverflow.com/questions/32889309/adding-gaussian-noise
std::ofstream file;
file.open(prefix_path+"data.txt");
if(file.is_open()){
for(double x_=-1.;x_<1.;x_=x_+0.01){
x_num++;
//double y_=(exp(3.0*pow(x_,3))-1.)/(x_-sin(x_))+dist(generator);
double y_=exp(3.0*x_)+2.0*sin(x_)+dist(generator);
x.push_back(x_);
y.push_back(y_);
file<<std::to_string(x_);
file<<" ";
file<<std::to_string(y_);
file<<"\n";
}
}
file.close();
}
struct curve_fitting
{
curve_fitting(const double x,const double y):x_(x),y_(y){
}
template<typename T>
bool operator()(const T* const a,const T* const b,T* residual)const{
//residual[0]=y_*(b[0]*x_-sin(x_))-(exp(a[0]*pow(x_,3))-1.);
//residual[0]=y_-(exp(a[0]*pow(x_,3))-1.0)/(b[0]*x_-sin(x_));
residual[0]=y_-exp(a[0]*x_)-b[0]*sin(x_);
return true;
}
private:
const double x_;
const double y_;
};
int main(int argc,char** argv){
std::vector<double> data_x;
std::vector<double> data_y;
double a{0.0};
double b{0.0};
generate_seq(data_x,data_y);
std::cout<<"x_num => "<<x_num<<std::endl;
Problem problem;
for(int i=0;i<x_num;i++){
CostFunction * costf = new AutoDiffCostFunction<curve_fitting,1,1,1>(
new curve_fitting(data_x.at(i),data_y.at(i)));
problem.AddResidualBlock(costf,nullptr,&a,&b);
}
Solver::Options option;
option.minimizer_progress_to_stdout=true;
option.max_num_iterations=100;
option.linear_solver_type;ceres::DENSE_QR;
Solver::Summary summary;
Solve(option,&problem,&summary);
std::cout<<summary.BriefReport()<<std::endl;
std::cout<<"final a => "<<a<<std::endl<<"final b => "<<b<<std::endl;
return 0;
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(main)
find_package(Ceres REQUIRED)
add_executable(curfitting curve_fitting.cpp)
target_link_libraries(curfitting Ceres::ceres)














 3728
3728











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









