






My implement of LeNet. Using cifar10 dataset.
参考了https://github.com/OUCTheoryGroup/colab_demo,多看看官方文档对学习pytorch也有好处,之前一直看代码,没有动手写,这次还是熟悉了一些api用法
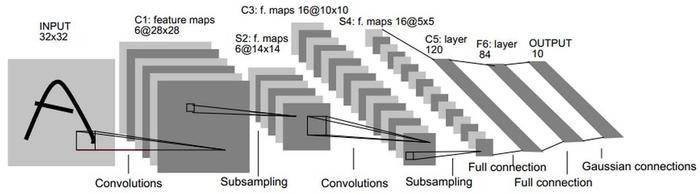
LeNet的网络结构,其中C5使用了55的卷积核将尺度下降为11,也有其他人用(400,120)的全连接层,不过由于此时尺度只有5*5,卷积和全连接也可以视为类似操作,其余改动便是LeNet使用tanh作为activation,这里使用relu
import torch
import torchvision
from torchvision import transforms
# import torchvision.transforms as transforms
from torch import nn
# import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
# 使用GPU训练,可以在菜单 "代码执行工具" -> "更改运行时类型" 里进行设置
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
# device = ="cuda:0" if torch.cuda.is_available() else "cpu"
# 加载数据集
transform_train = transforms.Compose([
transforms.RandomCrop(32, padding=4),
transforms.RandomHorizontalFlip(p = 0.5),
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))])
transform_test = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))])
# cifar10 dataset
# - train: True = 训练集, False = 测试集
trainset = torchvision.datasets.CIFAR10(root='./data', train=True, transform=transform_train, target_transform=None, download=True)
testset = torchvision.datasets.CIFAR10(root='./data', train=False, transform=transform_test, target_transform=None, download=True)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=128, shuffle=True, num_workers=2)
testloader = torch.utils.data.DataLoader(testset, batch_size=128, shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
class LeNet(nn.Module):
def __init__(self):
super(LeNet, self).__init__()
# BCHW [batch_size, channels, height, weight]
# [128, 3, 32, 32]
# [128, 6, 28, 28]
# [128, 16, 10, 10]
# [128, 16, 5, 5]
# [128, 120, 1, 1]
# [128, 84]
# [128, 10]
# nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding)
self.conv1 = nn.Conv2d(3, 6, 5)
# nn.MaxPool2d(kernel_size=2, stride=2, padding=0)
self.pool2 = nn.MaxPool2d(2, 2)
self.conv3 = nn.Conv2d(6, 16, 5)
self.pool4 = nn.MaxPool2d(kernel_size=2, stride=2, padding=0)
self.conv5 = nn.Conv2d(in_channels=16, out_channels=120, kernel_size=5, stride=1, padding=0)
# self.fc5= nn.Linear(400, 120) 400=16*5*5
self.fc6 = nn.Linear(in_features=120, out_features=84, bias=True)
self.fc7 = nn.Linear(in_features=84, out_features=10, bias=True)
# [batch_size, channels, height, weight] [128, 3, 32, 32]
def forward(self, x):
x = F.relu(self.conv1(x))
x = self.pool2(x)
x = F.relu(self.conv3(x))
x = self.pool4(x)
x = F.relu(self.conv5(x))
x = x.view(x.size(0), -1)
# x = F.relu(self.fc5(x))
x = F.relu(self.fc6(x))
out = self.fc7(x)
return out
# 网络放到GPU上
net = LeNet().to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(net.parameters(), lr=0.001)
for epoch in range(10): # 重复多轮训练
for i, (inputs, labels) in enumerate(trainloader):
inputs = inputs.to(device)
labels = labels.to(device)
# print(inputs.shape, labels.shape)
# torch.Size([128, 3, 32, 32]) torch.Size([128])
# 优化器梯度归零
optimizer.zero_grad()
# 正向传播 + 反向传播 + 优化
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# 输出统计信息
if i % 100 == 0:
print('Epoch: %d Minibatch: %5d loss: %.3f' %(epoch + 1, i + 1, loss.item()))
print('Finished Training')
correct = 0
total = 0
for data in testloader:
images, labels = data
images, labels = images.to(device), labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %.2f %%' % (
100 * correct / total))















 1709
1709











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









