







论文名称: YOLOv3: An Incremental Improvement
论文下载地址: https://arxiv.org/abs/1804.02767
参考代码: yolov3_spp
YOLOv3 整体网络结构
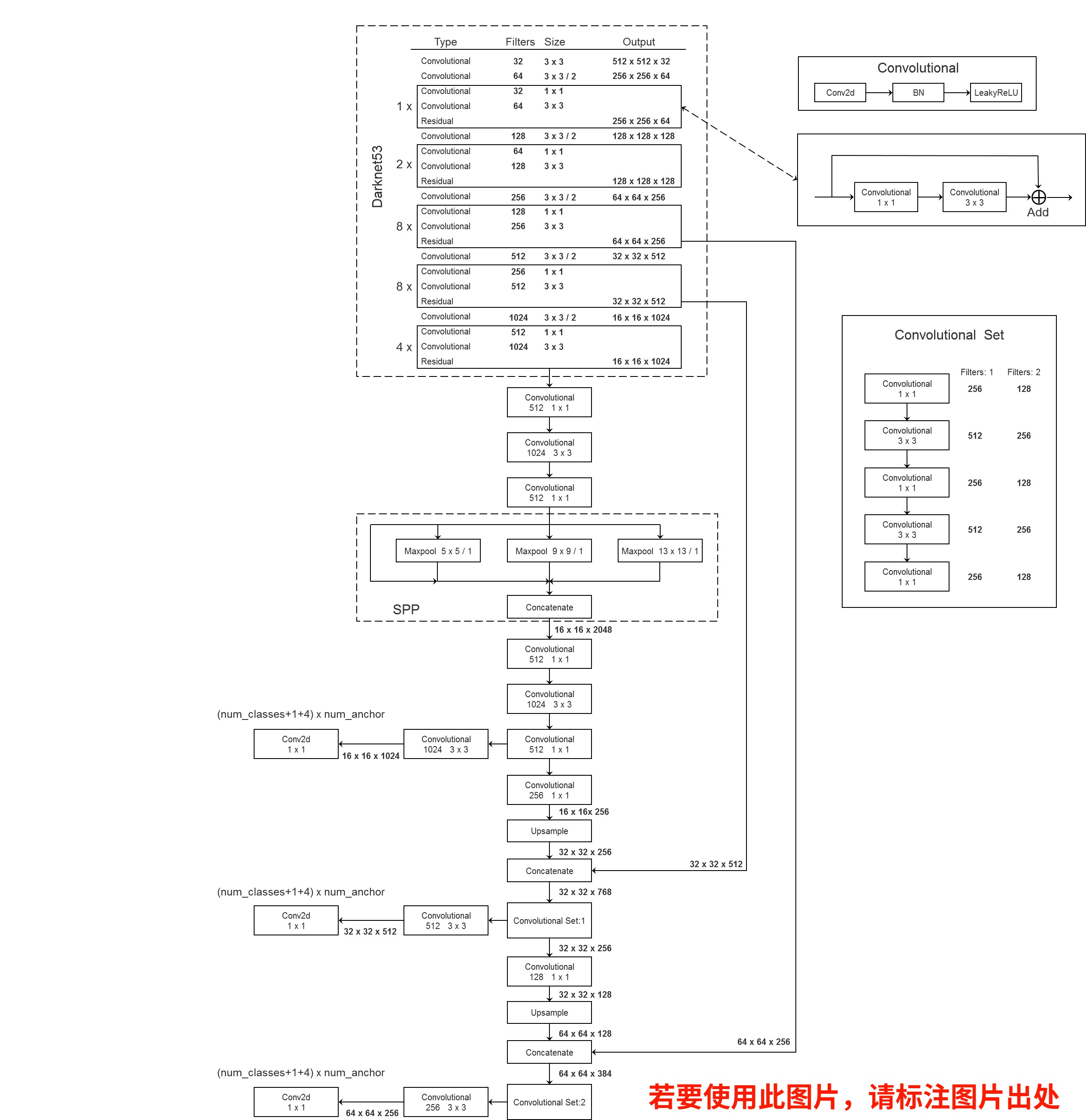
下图是yolov3-SPP的网络结构图,相比于论文的yolov3也有了一些变化,例如网络结构,正负样本匹配方式等,不过这都不是啥大问题,就顺着源码继续学习吧。
网络的Backbone采用的是Darknet-53,此名得益于53个convolutional layers(最后的Connected是全连接层也算卷积层,一共53个);Neck层采用类似特征金字塔FPN结构;Head采用经典的yoloHead,输出为3个尺度的特征图,分别为13×13、26×26、52×52,对应着9个anchor,每个尺度均分3个anchor, 最后一个维度对应[x,y,w,h,c]和num_class个的one-hot类别标签,以13x13特征图为例,它的shape大小是[B, 3, 13, 13, 4+1+class]
每一层预测anchor的数量对应特征图的大小和分配的anchor模板数量,以13x13特征图为例,数量为13x13x3。
最小的13×13的特征图上由于其感受野最大,应该使用大的anchor(116x90),(156x198),(373x326),这几个坐标是针对原始输入的,因此要除以32把尺度缩放到13×3下使用,适合较大的目标检测。中等特征图26*26适合检测中等目标。52x52的特征图感受野较小,应用最小的anchor box(10x13),(16x30),(33x23),适合检测较小的目标。
预测结果解码
下图展示了目标边界框的回归过程。图中虚线矩形框为Anchor模板宽
p
w
p_w
pw和高
p
h
p_h
ph,实线矩形框为通过网络预测的偏移量(相对Grid Cell的左上角)计算得到的预测边界框,(
c
x
c_x
cx,
c
y
c_y
cy)为对应Grid Cell的左上角坐标, (
t
x
t_x
tx,
t
y
t_y
ty,
t
w
t_w
tw,
t
h
t_h
th)分别为网络预测的边界框中心偏移量以及宽高缩放因子, (
b
x
b_x
bx,
b
y
b_y
by,
b
w
b_w
bw,
b
h
b_h
bh$)为最终预测的目标边界框。

代码实现:
io = p.clone() # [bs, anchor, grid, grid, xywh + obj + classes]
io[..., :2] = torch.sigmoid(io[..., :2]) + self.grid # xy 计算在feature map上的xy坐标
io[..., 2:4] = torch.exp(io[..., 2:4]) * self.anchor_wh # wh yolo method 计算在feature map上的wh
io[..., :4] *= self.stride # 换算映射回原图尺度
torch.sigmoid_(io[..., 4:])
正负样本匹配
原版yolov3中正负样本的匹配策略是max iou,对于训练图片中的ground truth,若其中心点落在某个cell内,那么该cell内的3个anchor box负责预测它,具体是哪个anchor box预测它,需要在训练中确定,即由那个与ground truth的IOU最大的anchor box预测它,而剩余的2个anchor box不与该ground truth匹配。
新版中的匹配方法为大于设定阈值即匹配为正样本。
def build_targets(p, targets, model):
# Build targets for compute_loss(), input targets(image_idx,class,x,y,w,h)
nt = targets.shape[0]
tcls, tbox, indices, anch = [], [], [], []
gain = torch.ones(6, device=targets.device).long() # normalized to gridspace gain
multi_gpu = type(model) in (nn.parallel.DataParallel, nn.parallel.DistributedDataParallel)
for i, j in enumerate(model.yolo_layers): # j: [89, 101, 113]
# 获取该yolo predictor对应的anchors
# 注意anchor_vec是anchors缩放到对应特征层上的尺度
anchors = model.module.module_list[j].anchor_vec if multi_gpu else model.module_list[j].anchor_vec
# p[i].shape: [batch_size, 3, grid_h, grid_w, num_params]
gain[2:] = torch.tensor(p[i].shape)[[3, 2, 3, 2]] # xyxy gain
na = anchors.shape[0] # number of anchors
# [3] -> [3, 1] -> [3, nt]
at = torch.arange(na).view(na, 1).repeat(1, nt) # anchor tensor, same as .repeat_interleave(nt)
# Match targets to anchors
a, t, offsets = [], targets * gain, 0
if nt: # 如果存在target的话
# 通过计算anchor模板与所有target的wh_iou来匹配正样本
# j: [3, nt] , iou_t = 0.20 anchors.shape: [3,2] 给每一个GT分配多个的anchor 由阈值决定
j = wh_iou(anchors, t[:, 4:6]) > model.hyp['iou_t'] # iou(3,n) = wh_iou(anchors(3,2), gwh(n,2))
# t.repeat(na, 1, 1): [nt, 6] -> [3, nt, 6]
# 获取正样本对应的anchor模板与target信息
a, t = at[j], t.repeat(na, 1, 1)[j] # filter a[n] t[n ,6] n = sum(j)
# Define
# long等于to(torch.int64), 数值向下取整
b, c = t[:, :2].long().T # image_idx, class
gxy = t[:, 2:4] # grid xy
gwh = t[:, 4:6] # grid wh
gij = (gxy - offsets).long() # 匹配targets所在的grid cell左上角坐标
gi, gj = gij.T # grid xy indices
# Append
# gain[3]: grid_h, gain[2]: grid_w
# image_idx, anchor_idx, grid indices(y, x)
indices.append((b, a, gj.clamp_(0, gain[3]-1), gi.clamp_(0, gain[2]-1)))
tbox.append(torch.cat((gxy - gij, gwh), 1)) # gt box相对anchor的x,y偏移量以及w,h
anch.append(anchors[a]) # anchors
tcls.append(c) # class
if c.shape[0]: # if any targets
# 目标的标签数值不能大于给定的目标类别数
assert c.max() < model.nc, 'Model accepts %g classes labeled from 0-%g, however you labelled a class %g. ' \
'See https://github.com/ultralytics/yolov3/wiki/Train-Custom-Data' % (
model.nc, model.nc - 1, c.max())
return tcls, tbox, indices, anch
损失函数的计算
YOLOv3的损失函数主要分为三个部分:目标定位偏移量损失(只有正样本,GIOU),目标置信度损失(正负样本都参与,BCELoss | FocalLos),目标分类损失(只有正样本,BCELoss | FocalLoss)。
def compute_loss(p, targets, model): # predictions, targets, model
device = p[0].device
lcls = torch.zeros(1, device=device) # Tensor(0)
lbox = torch.zeros(1, device=device) # Tensor(0)
lobj = torch.zeros(1, device=device) # Tensor(0)
tcls, tbox, indices, anchors = build_targets(p, targets, model) # targets
h = model.hyp # hyperparameters
red = 'mean' # Loss reduction (sum or mean)
# Define criteria
BCEcls = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['cls_pw']], device=device), reduction=red)
BCEobj = nn.BCEWithLogitsLoss(pos_weight=torch.tensor([h['obj_pw']], device=device), reduction=red)
# class label smoothing https://arxiv.org/pdf/1902.04103.pdf eqn 3
cp, cn = smooth_BCE(eps=0.0)
# focal loss
g = h['fl_gamma'] # focal loss gamma
if g > 0:
BCEcls, BCEobj = FocalLoss(BCEcls, g), FocalLoss(BCEobj, g)
# per output
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image_idx, anchor_idx, grid_y, grid_x
tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
nb = b.shape[0] # number of positive samples
if nb:
# 对应匹配到正样本的预测信息
ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
# GIoU
pxy = ps[:, :2].sigmoid()
pwh = ps[:, 2:4].exp().clamp(max=1E3) * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
giou = bbox_iou(pbox.t(), tbox[i], x1y1x2y2=False, GIoU=True) # giou(prediction, target)
lbox += (1.0 - giou).mean() # giou loss
# Obj
tobj[b, a, gj, gi] = (1.0 - model.gr) + model.gr * giou.detach().clamp(0).type(tobj.dtype) # giou ratio
# Class
if model.nc > 1: # cls loss (only if multiple classes)
t = torch.full_like(ps[:, 5:], cn, device=device) # targets
t[range(nb), tcls[i]] = cp
lcls += BCEcls(ps[:, 5:], t) # BCE
# Append targets to text file
# with open('targets.txt', 'a') as file:
# [file.write('%11.5g ' * 4 % tuple(x) + '\n') for x in torch.cat((txy[i], twh[i]), 1)]
lobj += BCEobj(pi[..., 4], tobj) # obj loss
# 乘上每种损失的对应权重
lbox *= h['giou']
lobj *= h['obj']
lcls *= h['cls']
# loss = lbox + lobj + lcls
return {"box_loss": lbox,
"obj_loss": lobj,
"class_loss": lcls}
小tips
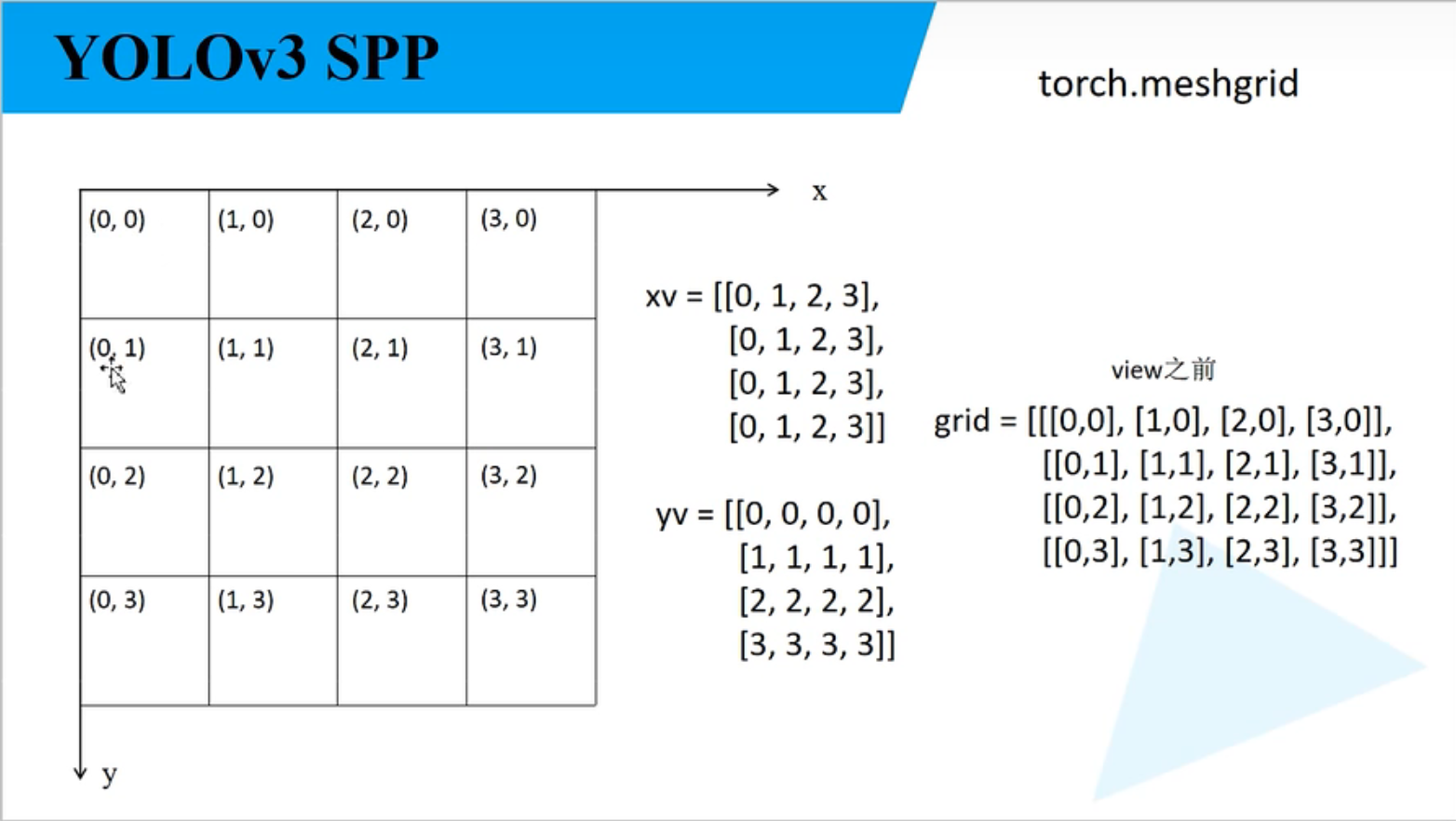
create_grids
self.ny, self.nx = 4 # 特征图大小
# yv [4,4] xv [4,4]
yv, xv = torch.meshgrid([torch.arange(self.ny, device=device),
torch.arange(self.nx, device=device)])
# torch.stack((xv, yv), 2) => [4, 4, 2]
# batch_size, na, grid_h, grid_w, wh
self.grid = torch.stack((xv, yv), 2).view((1, 1, self.ny, self.nx, 2)).float()
广播机制的用法
通过计算anchor模板与所有target的wh_iou来匹配正样本(粗略计算,左上角对齐算IOU),但是巧妙使用了广播机制。
def wh_iou(wh1, wh2):
# Returns the nxm IoU matrix. wh1 is nx2, wh2 is mx2
wh1 = wh1[:, None] # [N,1,2]
wh2 = wh2[None] # [1,M,2]
# 在1维复制M份, 在0维复制N份 取最小
inter = torch.min(wh1, wh2).prod(2) # [N,M] prod(2)在第二个维度上相乘
return inter / (wh1.prod(2) + wh2.prod(2) - inter) # iou = inter / (area1 + area2 - inter)















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









