






MLO: Multi-Object Tracking and Lidar Odometry in Dynamic Environment
摘要:当场景中存在大量的运动目标时,基于静态的场景假设的SLAM系统会存在较大的误差估计,语义对象的跟踪和维护有利于场景理解,为规划控制模块提供丰富的决策信息,本文介绍了MLO,一种仅使用激光雷达传感器跟踪ego-motion和语义对象的多目标激光雷达里程计,为了达到准确和鲁棒的多目标跟踪结果,提出了一种融合3d-box和几何点云的最小二乘估计器用于目标状态更新,通过分析跟踪队列中的目标对象的运动状态,在建图模块利用静态的object和环境特征来消除累计误差,同时,提供map坐标下连续的object轨迹,在kitti公开数据集的不同场景下进行了定量和定性的实验评估。实验结果表明MLO在高动态、非结构化和未知的语义场景中得到的ego-motion精度优于其他算法,同时,与基于滤波的多目标跟踪方法相比,基于语义几何融合的多目标跟踪方法在跟踪精度和一致性方面也具有明显优势
目前,在3D激光雷达SLAMMOT技术领域,大部分工作都集中在环境信息和语义对象的分离和跟踪上,然而对于obj的绝对运动估计和obj在mapping模块的作用少有研究,因此本文的另一个目的是恢复每一个obj在map坐标下的绝对轨迹,并且通过利用静态objs和环境特征来提高SLAM系统的精度和鲁棒性。(做跟踪和去除动态点)
METHOD
系统流程图
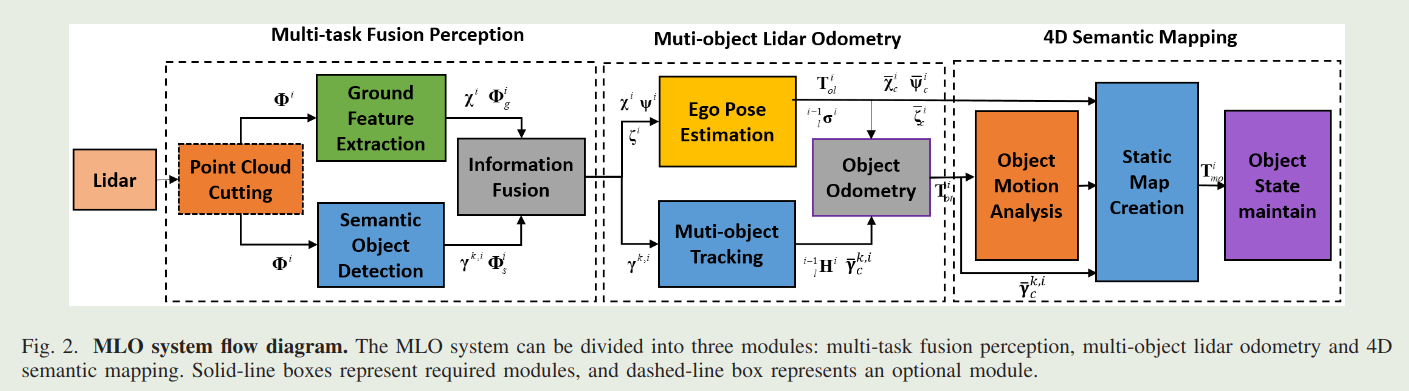
Multi-task Fusion Perception
选择感兴趣区域ROI的点云后,提取地面特征点和初步检测的obj内点云,信息融合模块通过相互校正的步骤,可以得到更准确的目标点分割和环境特征
-
Ground feature extraction.
PCA分析法拟合地面(label 0),为地面点加上标签 ,非地面点加上标签1,得到两类点集ground container 和background container
地面点处理:根据曲率在
中提取地面特征点
,并计算曲率先验值
用于后续非地面点的特征点提取,所有地面特征点曲率的平均值 
对地面点下采用获取候选地面点 (其实就是用来给特征点找对应点的)
非地面点处理:只计算曲率值并排序
-
Semantic object detection
利用3DSSD来进行点云目标检测,检测的得到的结果为obj位置,box长宽高,box朝向角

在obj内的点云加上标签 ,每一个box点云集为 ,box的置信度
-
Information fusion.
对于即属于box又属于地面点的点剔除调,对于有 标签且跑到box内的点也是如此(最后相当于三类标签:地面点、obj点、普通点)
对于非地面点 :
-
提取obj中的角点 -
提取普通点中曲率极端的角点和面点 -
曲率一般的less角点和面点 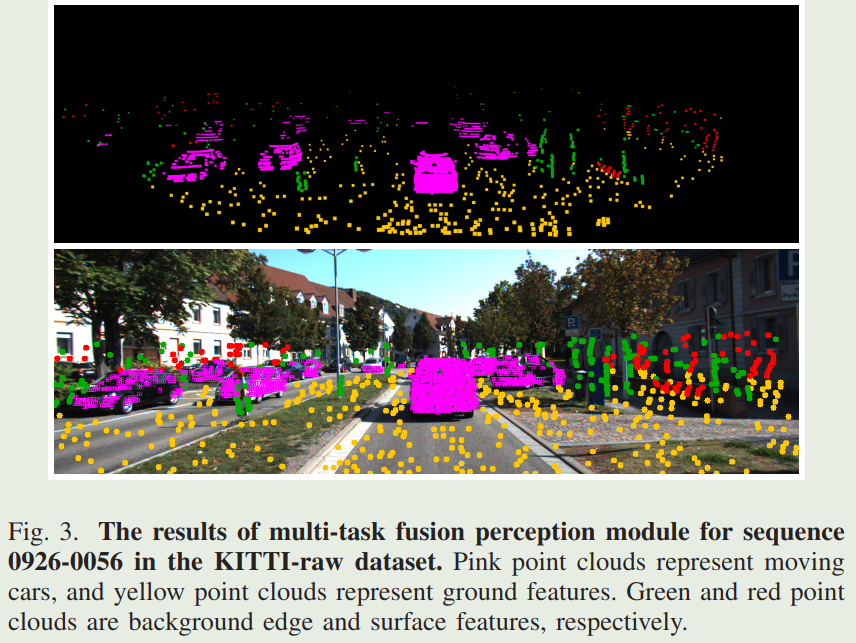
Multi-object Lidar Odometry
-
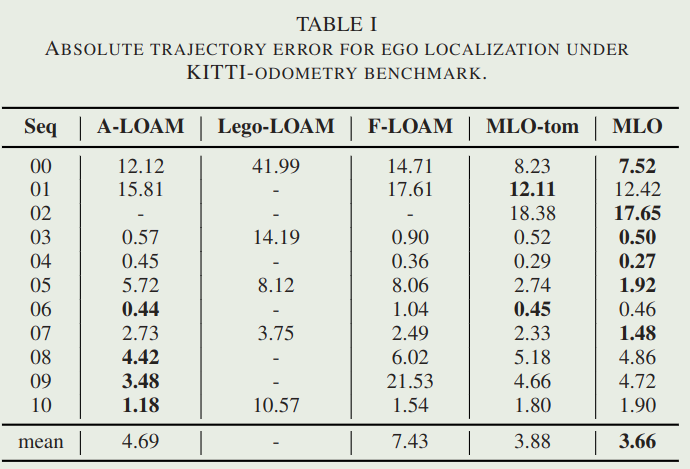
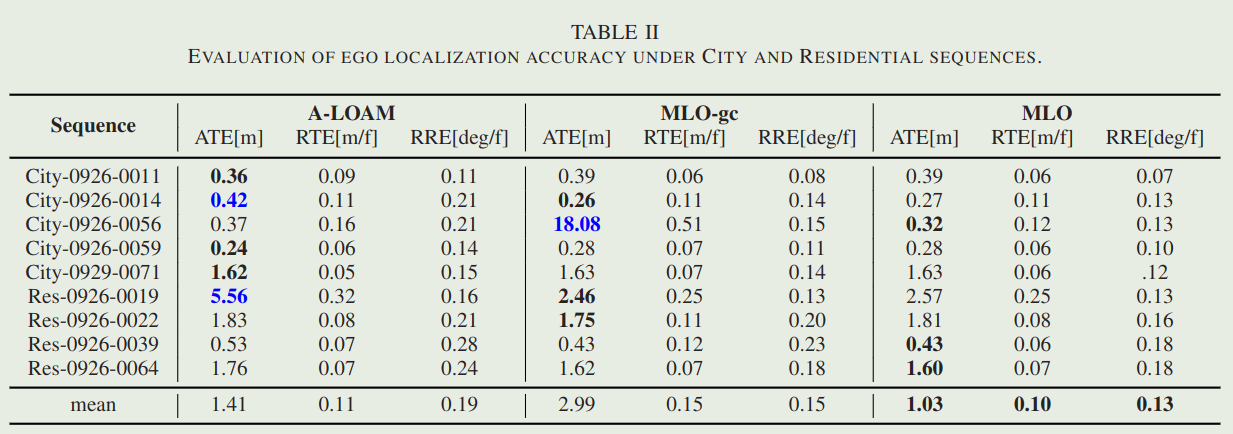
Robust ego odometry
采用lego-loam的两步法,但前面这个算法1是如何消除目标检测模块无法识别未知动态物体的影响的?实现地面和背景特征的几何一致性检查???
-
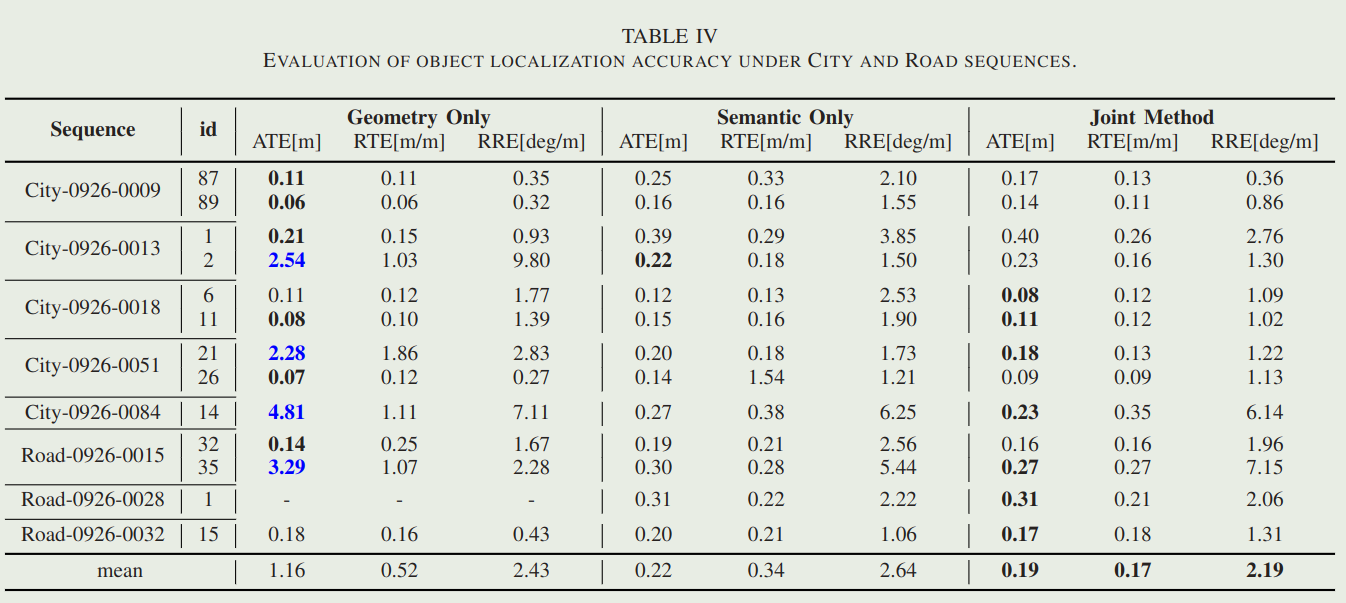
Multi-object tracking.
MOT包括obj的点、在box框上的采样点、雷达坐标系下的pose、跟踪状态
利用KM算法作匹配,代价函数的构造(位置误差、方向误差、box尺度误差???)
用最小二乘法来优化每个obj的相对运动,有内点和box上册采样点组成

-
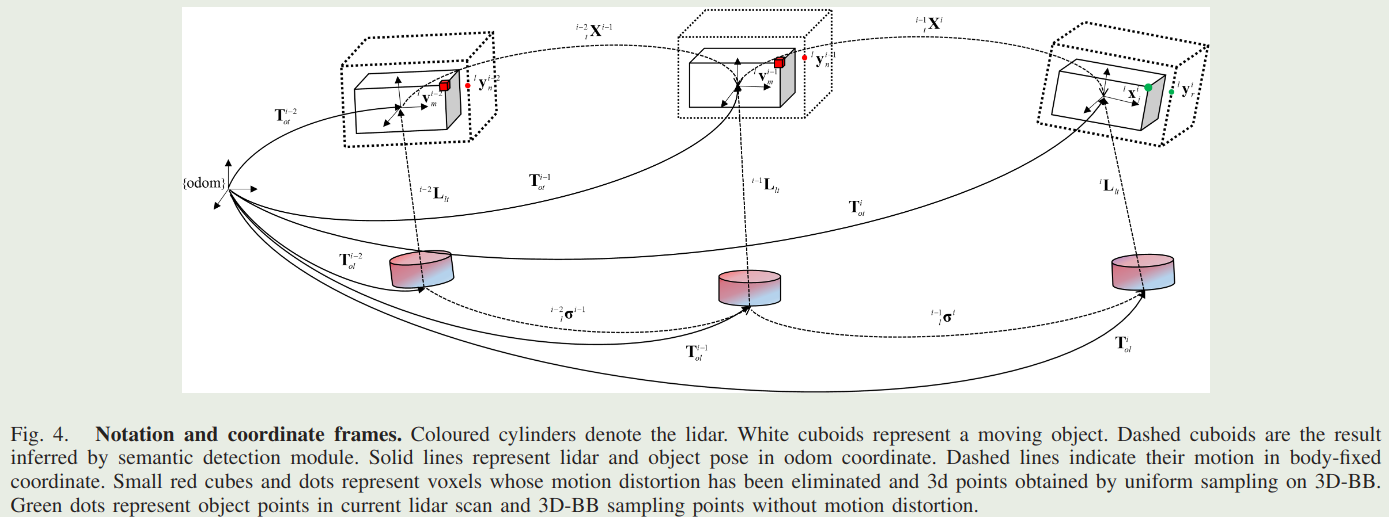
Object odometry.
根据雷达在map坐标系下位姿、obj在雷达坐标系下位姿,计算出obj在map下位姿
4D Semantic Object Mapping
-
Object motion analysis.
对比在跟踪列表中有相同ID的最老的静态obj位姿来判断是否移动
-
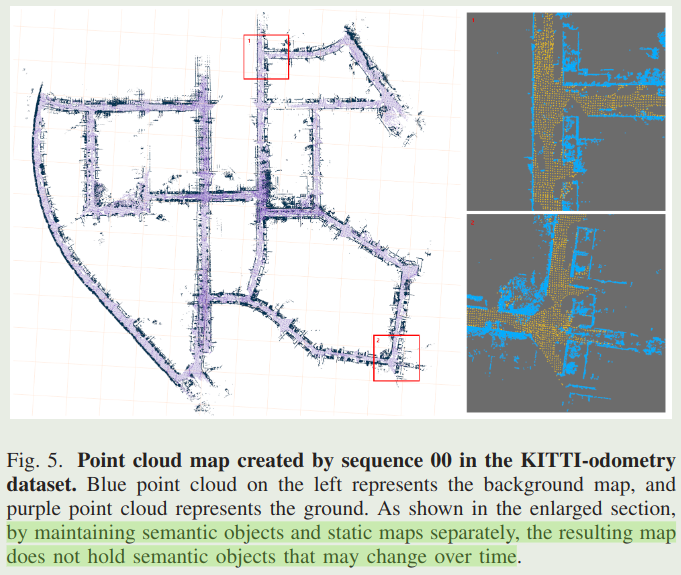
Static map creation.
用未包含语义obj的特征点创建静态地图
-
Object state maintaining
临时的obj地图,移除动态点,静态点后面会回到静态地图里面???还是说只是用来local map匹配用的??? 这个图里面说静态地图是没有语义obj的
EXPERIMENT
本文由 mdnice 多平台发布















 2632
2632











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









