







 本文详细介绍了MIMO雷达技术,包括其基本组成、工作原理、多路接收处理、相位法测角以及与单脉冲雷达和DBF雷达相比的优势。MIMO技术通过利用多个天线实现空间复用,增强信号质量和系统性能,尤其在空间分辨率、系统容量、目标检测及能量利用等方面表现出色。
本文详细介绍了MIMO雷达技术,包括其基本组成、工作原理、多路接收处理、相位法测角以及与单脉冲雷达和DBF雷达相比的优势。MIMO技术通过利用多个天线实现空间复用,增强信号质量和系统性能,尤其在空间分辨率、系统容量、目标检测及能量利用等方面表现出色。
目录
引言
多输入多输出(Multiple Input Multiple Output, MIMO)技术是一种无线通信技术,通过在发送端和接收端使用多个天线来增加通信系统的容量和效率,同时提高信号的质量和传输速率。MIMO技术能够利用多径传播的特性来实现空间复用,从而大幅提升无线信道的数据吞吐量和系统性能。这种技术在现代无线通信系统中得到了广泛应用,特别是在Wi-Fi(IEEE 802.11n/ac/ax)、蜂窝移动通信(4G LTE、5G)以及其他无线通信标准中。
单脉冲雷达
单脉冲雷达通过发射单一种类的信号波形,并通过特定的接收处理方式,能够在单次脉冲返回内实现目标的方位或高度信息测量。它通常使用两路接收信号:和波束(Sum beam)与差波束(Difference beam)或左波束(Left beam)和右波束(Right beam)。这种设计使单脉冲雷达在简化测量过程的同时,能够快速准确地估计目标的角度位置。
- 和波束输出用于测量目标的距离和速度信息。
- 差波束输出则用于测量目标的角度信息。
由于其单输入双输出(SISO)的特性,单脉冲雷达在目标定位方面具有较高的精度和效率。
相控阵数字波束形成雷达(DBF雷达)
DBF雷达通过多个发射天线同时发射相同的信号波形,并利用多个接收天线对返回信号进行接收。通过数字化处理,DBF雷达能够在不同方向上形成多个波束,实现对目标的高精度定位和跟踪,以及优化的信号处理性能。
- 单输入多输出(SIMO):虽然所有发射天线发射相同的波形,但由于接收端具有多个天线,因此可以视为SIMO系统。
- 灵活的波束管理:DBF雷达能够动态调整波束的方向和形状,优化覆盖范围和信号接收质量。
MIMO雷达
MIMO雷达系统通过在发射端和接收端分别使用多个天线,可以在同一时间频率资源上传输和接收多个独立信号,从而显著增加雷达系统的空间分辨率和性能。
- 分布式MIMO雷达:收发天线物理上分布较广,每个天线可以视为一个独立的雷达系统,能够提高对目标的探测范围和减小目标雷达截面积(RCS)的闪烁效应,从而提高探测性能。
- 集中式MIMO雷达:收发天线距离相对较近,通过构造大量虚拟天线对,增强了雷达系统的空间分辨能力,提高了测角精度、杂波抑制效果和能量利用率。
MIMO(多输入多输出)雷达系统相较于单脉冲雷达和数字波束形成(DBF)雷达,拥有若干显著优势,主要体现在以下几个方面:
增强的空间分辨率
MIMO雷达通过在发送端和接收端使用多个天线,能够在相同的时间频率资源下传输和接收多个独立的数据流。这一特性允许MIMO雷达利用空间复用来增加系统的空间分辨率,即在相同的频带宽度内,MIMO雷达可以获得比单脉冲雷达和DBF雷达更细致的空间信息,提高对目标的定位精度和识别能力。
提高系统容量
MIMO雷达的多天线架构可以在不增加额外频谱资源的情况下,显著增加雷达系统的信息传输能力。这种空间复用的能力使得MIMO雷达在处理复杂场景或多目标环境时,能够提供更高的数据处理能力和系统容量。
改善信号质量
MIMO雷达能够通过分集增益和波束成形技术来改善信号质量。分集增益可以增强信号的可靠性,减少由于信道衰落引起的信号丢失。波束成形技术则可以集中信号能量,提高特定方向上的信号接收质量,同时减少对其他方向的干扰。
灵活的目标检测和跟踪
MIMO雷达系统可以灵活地调整其发射和接收模式,以适应不同的探测和跟踪需求。无论是分布式MIMO雷达还是集中式MIMO雷达,都可以通过调整天线阵列的工作模式,优化对特定目标或场景的检测性能。
减少闪烁效应
分布式MIMO雷达,由于其收发天线之间较大的物理间隔,可以有效减少目标雷达截面积(RCS)的闪烁效应。这一特性使得MIMO雷达在探测具有变化RCS特性的目标时,能够提供更稳定和可靠的检测性能。
高效的能量利用
集中式MIMO雷达由于天线间距较近,可以通过构造虚拟天线对,实现虚拟孔径的扩展,从而提高雷达系统对信号能量的利用效率。这种高效的能量利用能够提高雷达系统的探测范围和测角精度。
总结而言,MIMO雷达相比于单脉冲雷达和DBF雷达,提供了更高的空间分辨率、系统容量、信号质量以及对复杂目标环境的适应性。这些优势使MIMO雷达在现代雷达系统中扮演着越来越重要的角色,特别是在要求高性能和灵活性的军事和民用领域。
MIMO雷达
MIMO(多输入多输出)雷达系统是一种先进的雷达技术,它通过使用多个发射天线和多个接收天线来提高雷达性能。这种配置允许系统在相同的时间频率资源上传输和接收多个独立的信号,从而实现高空间分辨率和增强的目标检测能力。
基本组成
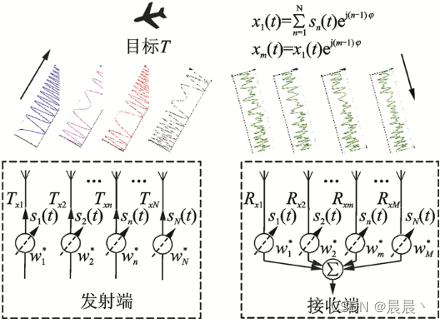
MIMO雷达通常包含多个发射天线和多个接收天线(天线也可以收发共用), 各发射天线发射不同的信号波形, 各发射信号经过目标反射后被多个接收天线接收, 并经过多路接收机后送给信号处理进行后续处理。
多个发射天线
发射天线用于发送不同的信号波形。在MIMO雷达系统中,这些波形被设计为相互正交或部分相关,以减少不同信号间的相互干扰,允许雷达同时覆盖更大的空间范围。
多个接收天线
接收天线用于捕捉目标反射回来的信号。多个接收天线可以从不同的空间角度接收反射信号,提供额外的角度信息,从而增强目标定位和识别的能力。
工作原理
在MIMO雷达系统中,由于发射的信号波形之间是相互正交或部分相关的,这使得雷达不再依赖于形成高增益的窄波束来进行目标探测,而是能够覆盖更大的空间范围,实现对多目标的同时跟踪和搜索。这种工作模式在需要同时监视广阔区域中的多个目标时非常有用。
在MIMO雷达系统中各阵元各发射信号不再是一组相干信号, 而是一组相互正交或部分相关信号。此时各信号在空间叠加后不会形成高增益的窄波束, 而是会形成低增益的宽波束, 对较大的空域范围同时实现能量覆盖, 从而实现对大空域范围内的目标同时进行跟踪和搜索。当MIMO雷达各发射信号相互正交时, 则其发射能量覆盖没有方向性(假设单个天线单元没有方向性), 在所有方向增益相同; 当各发射信号部分相关时, 则其发射能量覆盖为低增益的宽波束, 波束指向和波束宽度由发射信号波形及其相位决定; 当各发射信号完全相关(即相干)时, 则其发射能量覆盖为高增益的窄波束, 波束指向由发射信号相位决定, 此时等效于各发射信号完全相同, 只是相位不同, 这时就变成了常规的相控阵雷达(更准确地说是数字阵列雷达)。
MIMO处理流程

MIMO相位法测角
MIMO(多输入多输出)雷达的相位法测角是一种利用MIMO雷达系统中多个天线元素接收到的信号相位差异来确定目标方位的技术。这种方法基于的核心原理是:当一个远场信号从特定方向到达MIMO雷达的天线阵列时,不同天线元素接收到的信号之间会存在一定的时间延迟,这导致了相位上的差异。通过测量这些相位差异,可以推算出信号的到达角度(方位角或仰角)。
相位法测角的基本原理
在一个典型的MIMO雷达系统中,假设有N个发射天线和M个接收天线。当这些天线均匀排列时,任意两个相邻天线之间的距离是相等的。如果一个信号从某个方向到达,那么不同的接收天线将会在不同的时间接收到这个信号,产生了相位差。这个相位差与信号的到达角度、天线之间的距离以及信号的波长有关。
设在𝜃方向有远区目标,则到达接收点的目标所反射的电波近似为平面波。由于两天线间距为𝑑,故它们所收到的信号由于存在的波程差𝛥𝑅而产生一相位差𝛥𝜑.
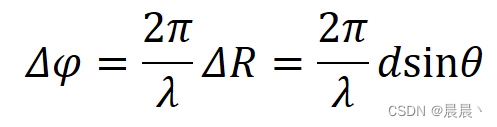
其中,𝛥𝜑表示相位差,λ表示波长,d表示相邻天线之间的距离,𝜃表示信号的达到角度。
用相位计进行比相,测出相位差𝜑,就可以确定目标方向的𝜃。
注:通常两天线的间距𝑑较小,使得相位差𝜑的值不超过2𝜋。因此短基线可保证较大的无模糊测角范围。
优势
- 相位法测角提供了一种简单直接的方式来估算目标的方位,尤其是在目标位置相对于雷达系统发生变化时。
- 适用于处理高速移动的目标。
限制
- 测量的精度受到天线间距和信号波长的限制。如果天线间距过大,可能会导致相位模糊,即相同的相位差对应多个可能的到达角度。
- 在多径环境下,不同路径的信号叠加可能会影响测量的准确性。
测角误差与多值性问题
相位差𝜑值测量不准将产生测角误差,将上式两边微分,则它们之间的关系为:
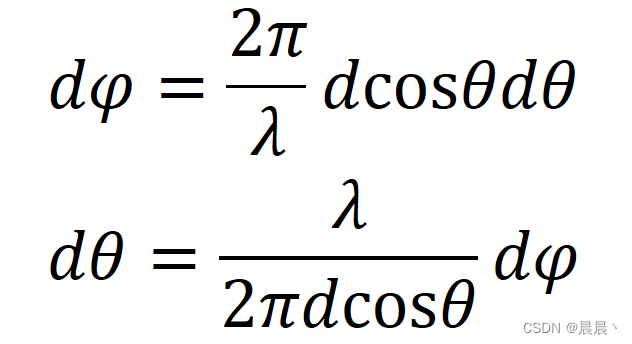
采用读数精度高的相位计(𝑑𝜑小),或者增大𝑑/𝜆的比值,均可提高测角精度。
注意:当𝑑/𝜆增大到一定时,𝜑的值可能超过2𝜋,这时𝜑=2𝜋𝑁+𝜓,其中𝑁为正整数;
𝜓<2𝜋,而相位计实际读数为𝜓。由于未𝑁知,因此无法计算真实值𝜑,故会出现模糊。
解决:采用多天线测角,间距大的天线用来提高测角精度,间距小的天线用来解决多值性问题。



















 8234
8234

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











