






这里写自定义目录标题
1 更改Ubuntu软件源
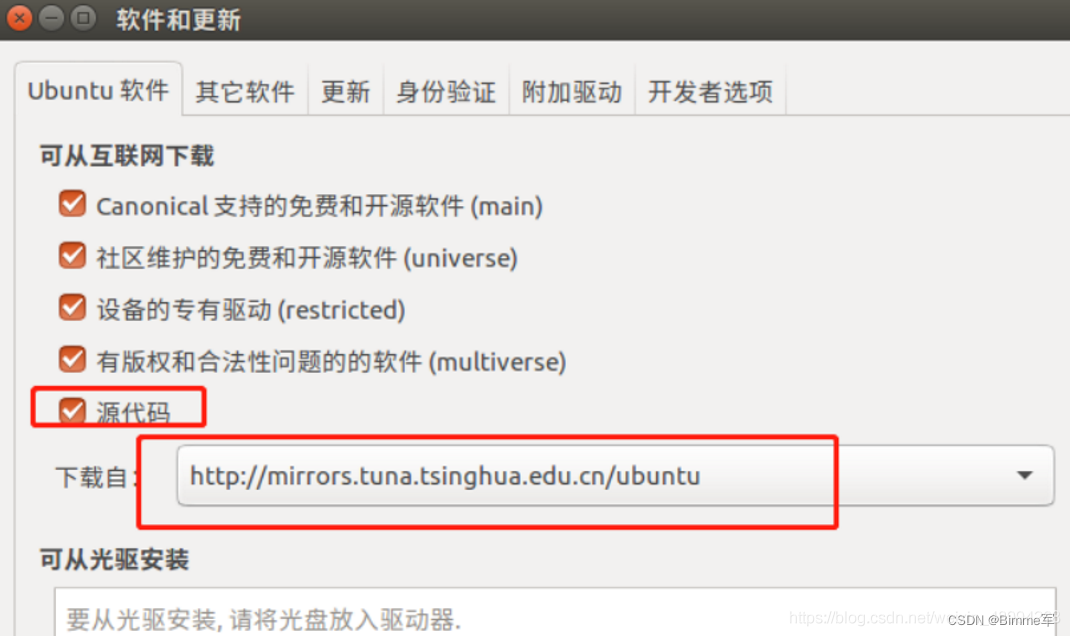
打开软件和更新,将下载源设为清华源:
2 设置软件源
清华源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
3 设置密钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
4 安装过程及问题解决
4.1 安装
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
sudo apt-get install ros-melodic-rqt*
4.2 初始化
sudo apt-get install python-rosdep
sudo rosdep init
4.3 更新
rosdep update
4.4 构建工厂依赖
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
4.5 创建并初始化工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_make
4.5 设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
echo "source /home/llj/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
5 测试
roscore

















 9937
9937

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









