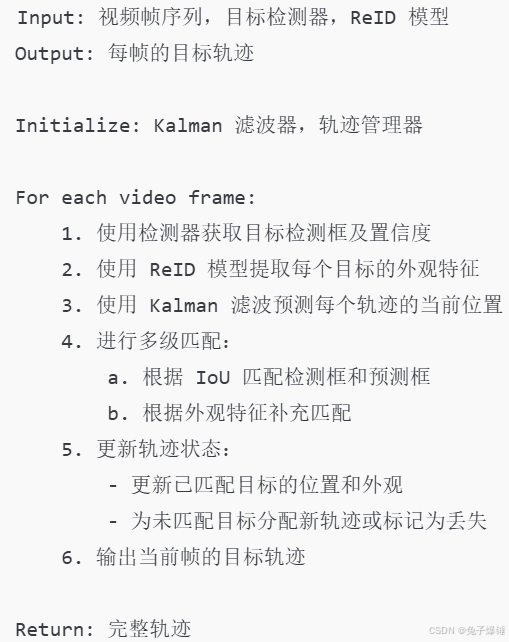
1. 伪代码
2. STrack 类
# 这个类是用来存放轨迹的,每个轨迹都有一些自己的属性,例如id、边界框、预测框、状态等等
# 继承 BaseTrack 的单个 track 类
class STrack(BaseTrack):
shared_kalman = KalmanFilter()
def __init__(self, tlwh, score, feat=None, feat_history=50): # bboxs score 得分
# wait activate
# 初始化 track 全部都是 False 的状态
# 一般是第一次出现某个 track 的情景
self._tlwh = np.asarray(tlwh, dtype=np.float)
self.kalman_filter = None
self.mean, self.covariance = None, None
self.is_activated = False
self.score = score
self.tracklet_len = 0
self.smooth_feat = None
self.curr_feat = None
if feat is not None:
self.update_features(feat)
self.features = deque([], maxlen=feat_history)
self.alpha = 0.9
def update_features(self, feat):
feat /= np.linalg.norm(feat)
self.curr_feat = feat
if self.smooth_feat is None:
self.smooth_feat = feat
else:
self.smooth_feat = self.alpha * self.smooth_feat + (1 - self.alpha) * feat
self.features.append(feat)
self.smooth_feat /= np.linalg.norm(self.smooth_feat) # 用于求范数,linalg本意为linear(线性) + algebra(代数),norm则表示范数
# 预测这个 track 下一次的位置,其实就是调用自身卡尔曼的 predict 函数更新均值和方差
def predict(self):
mean_state = self.mean.copy()
if self.state != TrackState.Tracked:
mean_state[6] = 0
mean_state[7] = 0
self.mean, self.covariance = self.kalman_filter.predict(mean_state, self.covariance)
@staticmethod
# 这个就是 predict 函数的矩阵版本,做的事情是一样的
def multi_predict(stracks):
if len(stracks) > 0:
multi_mean = np.asarray([st.mean.copy() for st in stracks]) # mean的值是从哪里来的???????????
multi_covariance = np.asarray([st.covariance for st in stracks])
for i, st in enumerate(stracks):
if st.state != TrackState.Tracked:
multi_mean[i][6] = 0
multi_mean[i][7] = 0
multi_mean, multi_covariance = STrack.shared_kalman.multi_predict(multi_mean, multi_covariance)
for i, (mean, cov) in enumerate(zip(multi_mean, multi_covariance)):
stracks[i].mean = mean
stracks[i].covariance = cov
@staticmethod
def multi_gmc(stracks, H=np.eye(2, 3)): # 得到仿射矩阵后, 修正Kalman的结果
if len(stracks) > 0:
multi_mean = np.asarray([st.mean.copy() for st in stracks])
multi_covariance = np.asarray([st.covariance for st in stracks])
R = H[:2, :2]
R8x8 = np.kron(np.eye(4, dtype=float), R)
t = H[:2, 2]
for i, (mean, cov) in enumerate(zip(multi_mean, multi_covariance)):
mean = R8x8.dot(mean)
mean[:2] += t
cov = R8x8.dot(cov).dot(R8x8.transpose())
stracks[i].mean = mean
stracks[i].covariance = cov
# 新激活一个轨迹,用轨迹的初始框来初始化对应的卡尔曼滤波器的参数,并且记录下 track 的 id
# 这个是新建一个 track 调用的函数,并且如果是视频刚开始的话,直接会将 track 的状态变成激活态
# 不是在视频刚开始激活的框的状态为未激活,需要下一帧还有检测框与其进行匹配才会变成激活状态
def activate(self, kalman_filter, frame_id):
"""Start a new tracklet"""
self.kalman_filter = kalman_filter
self.track_id = self.next_id()
# self.mean, self.covariance = self.kalman_filter.initiate(self.tlwh_to_xywh(self._tlwh))
self.mean, self.covariance = self.kalman_filter.initiate(self.tlwh_to_xywh(self._tlwh), self.score)
self.tracklet_len = 0
self.state = TrackState.Tracked
if frame_id == 1:
self.is_activated = True
self.frame_id = frame_id
self.start_frame = frame_id
# 这个应该是轨迹被遮挡或者消失之后重新激活轨迹调用的函数
def re_activate(self, new_track, frame_id, new_id=False):
# self.mean, self.covariance = self.kalman_filter.update(self.mean, self.covariance, self.tlwh_to_xywh(new_track.tlwh))
self.mean, self.covariance = self.kalman_filter.update(self.mean, self.covariance, self.tlwh_to_xywh(new_track.tlwh), new_track.score) # ???????????????????
if new_track.curr_feat is not None:
self.update_features(new_track.curr_feat)
self.tracklet_len = 0
self.state = TrackState.Tracked
self.is_activated = True
self.frame_id = frame_id
if new_id:
self.track_id = self.next_id()
self.score = new_track.score
# 更新轨迹的位置
def update(self, new_track, frame_id): # self本身就是 轨迹
"""
Update a matched track
:type new_track: STrack 其实就是检测的 new_track
:type frame_id: int
:type update_feature: bool
:return:
"""
self.frame_id = frame_id
self.tracklet_len += 1
new_tlwh = new_track.tlwh
self.mean, self.covariance = self.kalman_filter.update(self.mean, self.covariance, self.tlwh_to_xywh(new_tlwh), new_track.score) # ?????????????????
if new_track.curr_feat is not None:
self.update_features(new_track.curr_feat)
self.state = TrackState.Tracked
self.is_activated = True
self.score = new_track.score
@property
# @jit(nopython=True)
# 这个函数很重要,在进行匹配的时候会调用到他,指的是 track 在经过卡尔曼预测之后在当前帧的位置
# 所以这里用了 mean,因为卡尔曼经过 predict 之后会更新 mean 和 covariance 的状态,mean 是
# [cx, cy, w, h, vx, vy, vw, vh],所以 self.mean[:4] 指的就是预测框的坐标信息
def tlwh(self):
"""Get current position in bounding box format `(top left x, top left y,
width, height)`.
"""
if self.mean is None:
return self._tlwh.copy()
ret = self.mean[:4].copy()
ret[:2] -= ret[2:] / 2 # 相当于是 中心点xy - 宽高的一半 = tl
return ret
@property
def tlbr(self):
"""Convert bounding box to format `(min x, min y, max x, max y)`, i.e.,
`(top left, bottom right)`.
"""
ret = self.tlwh.copy()
ret[2:] += ret[:2]
return ret
@property
def xywh(self):
"""Convert bounding box to format `(min x, min y, max x, max y)`, i.e.,
`(top left, bottom right)`.
"""
ret = self.tlwh.copy()
ret[:2] += ret[2:] / 2.0
return ret
@staticmethod
def tlwh_to_xyah(tlwh):
"""Convert bounding box to format `(center x, center y, aspect ratio,
height)`, where the aspect ratio is `width / height`.
"""
ret = np.asarray(tlwh).copy()
ret[:2] += ret[2:] / 2
ret[2] /= ret[3]
return ret
@staticmethod
def tlwh_to_xywh(tlwh):
"""Convert bounding box to format `(center x, center y, width,
height)`.
"""
ret = np.asarray(tlwh).copy()
ret[:2] += ret[2:] / 2
return ret
def to_xywh(self):
return self.tlwh_to_xywh(self.tlwh)
@staticmethod
def tlbr_to_tlwh(tlbr):
ret = np.asarray(tlbr).copy()
ret[2:] -= ret[:2]
return ret
@staticmethod
def tlwh_to_tlbr(tlwh):
ret = np.asarray(tlwh).copy()
ret[2:] += ret[:2]
return ret
def __repr__(self):
return 'OT_{}_({}-{})'.format(self.track_id, self.start_frame, self.end_frame)
3. BoTSORT类
# 正片开始
class BoTSORT(object):
def __init__(self, args, frame_rate=30):
self.tracked_stracks = [] # type : list[STrack] 已追踪轨迹:在前一帧成功追踪的轨迹
self.lost_stracks = [] # type : list[STrack] 失追轨迹:在前n帧失去追踪的轨迹(n<=30)
self.removed_stracks = [] # type : list[STrack] 已删除轨迹:在前n帧失去追踪的轨迹(n>30)
BaseTrack.clear_count() # 应该是初始跟踪,所以清零
self.frame_id = 0
self.args = args
self.track_high_thresh = args.track_high_thresh
self.track_low_thresh = args.track_low_thresh
self.new_track_thresh = args.new_track_thresh
# 缓冲的帧数,超过这么多帧丢失目标才算是真正丢失
self.buffer_size = int(frame_rate / 30.0 * args.track_buffer)
self.max_time_lost = self.buffer_size
self.kalman_filter = KalmanFilter()
# ReID module
self.proximity_thresh = args.proximity_thresh
self.appearance_thresh = args.appearance_thresh
if args.with_reid:
self.encoder = FastReIDInterface(args.fast_reid_config, args.fast_reid_weights, args.device)
if args.benchmark in ["MOT16", "dancetrack"]:
pass
else:
self.gmc = GMC(method=args.cmc_method, verbose=[args.name, args.ablation])
# 追踪主要逻辑函数
def update(self, output_results, img): # 检测输出结果 原图
self.frame_id += 1
activated_starcks = [] # 保存当前帧匹配到持续追踪的轨迹
refind_stracks = [] # 保存当前帧匹配到之前目标丢失的轨迹
lost_stracks = [] # 保存当前帧没有匹配到目标的轨迹
removed_stracks = [] # 保存当前帧
if len(output_results):
# 第一步:将objects转换为x1,y1,x2,y2,score的格式,并构建strack
# output_results 是 [xyxy,score] 或者 [xyxy, score, conf] 的情况
if output_results.shape[1] == 5:
scores = output_results[:, 4]
bboxes = output_results[:, :4]
classes = output_results[:, -1]
else:
# scores = output_results[:, 4] * output_results[:, 5] # [left,top,right,bottom,obj_conf,cls_conf,cls_id]
scores = output_results[:, 4] # [left,top,right,bottom,cls_conf,cls_id]
bboxes = output_results[:, :4] # x1y1x2y2
classes = output_results[:, -1]
# 第二步:根据scroe和track_thresh将strack分为detetions(dets)(>=)和detections_low(dets_second)
# Remove bad detections 移除效果比较差的检测,置信度低于0.1
lowest_inds = scores > self.track_low_thresh
bboxes = bboxes[lowest_inds]
scores = scores[lowest_inds]
classes = classes[lowest_inds]
# Find high threshold detections 高置信度检测 0.65
remain_inds = scores > self.args.track_high_thresh
dets = bboxes[remain_inds]
scores_keep = scores[remain_inds]
classes_keep = classes[remain_inds]
else:
bboxes = []
scores = []
classes = []
dets = []
scores_keep = []
classes_keep = []
'''Extract embeddings '''
if self.args.with_reid:
features_keep = self.encoder.inference(img, dets) # 获得检测框中,经过 ReID提取得到的特征向量
if len(dets) > 0:
'''Detections'''
if self.args.with_reid:
# 结果很特殊,因为类中实现了__repr__(self):
# 'OT_{}_({}-{})'.format(self.track_id, self.start_frame, self.end_frame)
# [OT_1_(1 - 20), OT_2_(1 - 20), OT_3_(1 - 20)......]
# 把初始框封装成 STrack 的格式
detections = [STrack(STrack.tlbr_to_tlwh(tlbr), s, f) for
(tlbr, s, f) in zip(dets, scores_keep, features_keep)]
else:
detections = [STrack(STrack.tlbr_to_tlwh(tlbr), s) for
(tlbr, s) in zip(dets, scores_keep)]
else:
detections = []
''' Add newly detected tracklets to tracked_stracks. 将新检测到的轨迹添加到tracked_stracks'''
# 遍历tracked_stracks(所有的轨迹),如果track还activated,加入tracked_stracks(继续匹配该帧),否则加入unconfirmed
unconfirmed = [] # 未确定的轨迹
tracked_stracks = [] # 确定轨迹 # type: list[STrack]
# is_activated表示除了第一帧外中途只出现一次的目标轨迹(新轨迹,没有匹配过或从未匹配到其他轨迹)
for track in self.tracked_stracks: # self.tracked_stracks : [OT_1_(1-20), OT_2_(1-20), OT_3_(1-20), OT_4_(1-20), OT_5_(1-20), OT_6_(1-20), OT_7_(1-20), OT_8_(1-20), OT_9_(3-20)]
# 当 track 只有一帧的记录时,is_activated=False
if not track.is_activated: # track.is_activated 为 True表示,该轨迹是确定轨迹
unconfirmed.append(track)
else:
tracked_stracks.append(track)
''' Step 2: First association, with high score detection boxes 高分检测框进行第一次关联'''
# 第一次匹配
# 将track_stracks和lost_stracks合并得到track_pool
# 丢失的 track 代表某一帧可能丢了一次,但是仍然在缓冲帧范围之内,所以依然可以用来匹配
strack_pool = joint_stracks(tracked_stracks, self.lost_stracks) # OT_1_(1-20),'OT_{}_({}-{})'.format(self.track_id, self.start_frame, self.end_frame) strack_pool : [OT_1_(1-20), OT_2_(1-20), OT_3_(1-20), OT_4_(1-20), OT_5_(1-20), OT_6_(1-20), OT_7_(1-20), OT_8_(1-20), OT_9_(3-20)]
# Predict the current location with KF 用卡尔曼滤波预测
# 将strack_pool送入muti_predict进行预测(卡尔曼滤波)
STrack.multi_predict(strack_pool)
# Fix camera motion 这一块先不管哈!!!!!!!!!!!!!!!
warp = self.gmc.apply(img, dets)
STrack.multi_gmc(strack_pool, warp)
STrack.multi_gmc(unconfirmed, warp)
# Associate with high score detection boxes 确定轨迹与丢失轨迹 与 高分检测框先进性匹配
# 让预测后的 track 和当前帧的 detection 框做 cost_matrix,用的方式为 IOU 关联
# 这里的 iou_distance 函数中调用了 track.tlbr,返回的是预测之后的 track 坐标信息
ious_dists = matching.iou_distance(strack_pool, detections) # 已计算出 IOU损失
ious_dists_mask = (ious_dists > self.proximity_thresh) # self.proximity_thresh = 0.5
if not self.args.mot20:
ious_dists = matching.fuse_score(ious_dists, detections) # 我的理解:IOU结果与检测score结合了
if self.args.with_reid:
emb_dists = matching.embedding_distance(strack_pool, detections) / 2.0
raw_emb_dists = emb_dists.copy()
emb_dists[emb_dists > self.appearance_thresh] = 1.0 # 外观损失 大于 0.25,直接把损失定为 1
emb_dists[ious_dists_mask] = 1.0 # 把 IOU损失过大的,直接定为 1 (ps:IOU与检测未结合的损失哈)
dists = np.minimum(ious_dists, emb_dists) # IOU与嵌入损失,取最小值
# Popular ReID method (JDE / FairMOT)
# raw_emb_dists = matching.embedding_distance(strack_pool, detections)
# dists = matching.fuse_motion(self.kalman_filter, raw_emb_dists, strack_pool, detections)
# emb_dists = dists
# IoU making ReID
# dists = matching.embedding_distance(strack_pool, detections)
# dists[ious_dists_mask] = 1.0
else:
dists = ious_dists
# 用match_thresh = 0.8(越大说明iou越小)过滤较小的iou,利用匈牙利算法进行匹配,得到matches, u_track, u_detection
matches, u_track, u_detection = matching.linear_assignment(dists, thresh=self.args.match_thresh) # 返回匹配的轨迹,未匹配轨迹,未匹配高分检测
# 遍历matches,如果state为Tracked,调用update方法,并加入到activated_stracks,否则调用re_activate,并加入refind_stracks
# matches = [itracked, idet] itracked指的是轨迹的索引,idet 指的是当前目标框的索引,意思是第几个轨迹匹配第几个目标框
for itracked, idet in matches:
track = strack_pool[itracked]
det = detections[idet]
# 对应 strack_pool 中的 tracked_stracks
if track.state == TrackState.Tracked:
# 更新轨迹的bbox为当前匹配到的bbox
track.update(detections[idet], self.frame_id)
# activated_starcks是目前能持续追踪到的轨迹
activated_starcks.append(track)
# 对应 strack_pool 中的 self.lost_stracks,重新激活 track
else:
track.re_activate(det, self.frame_id, new_id=False)
# refind_stracks是重新追踪到的轨迹
refind_stracks.append(track)
# 第二次匹配:和低分的矩阵进行匹配
''' Step 3: Second association, with low score detection boxes'''
if len(scores):
inds_high = scores < self.args.track_high_thresh
inds_low = scores > self.args.track_low_thresh
inds_second = np.logical_and(inds_low, inds_high) # 筛选分数处于0.1<分数<阈值的
dets_second = bboxes[inds_second]
scores_second = scores[inds_second]
classes_second = classes[inds_second]
else:
dets_second = []
scores_second = []
classes_second = []
# association the untrack to the low score detections
if len(dets_second) > 0:
'''Detections'''
detections_second = [STrack(STrack.tlbr_to_tlwh(tlbr), s) for
(tlbr, s) in zip(dets_second, scores_second)]
else:
detections_second = []
# 找出第一次匹配中没匹配到的轨迹(激活状态) 找出 strack_pool 中没有被匹配到的 track(这帧目标被遮挡的情况)
r_tracked_stracks = [strack_pool[i] for i in u_track if strack_pool[i].state == TrackState.Tracked]
# 计算r_tracked_stracks和detections_second的iou_distance(代价矩阵)
dists = matching.iou_distance(r_tracked_stracks, detections_second)
# 用match_thresh = 0.8过滤较小的iou,利用匈牙利算法进行匹配,得到matches, u_track, u_detection
matches, u_track, u_detection_second = matching.linear_assignment(dists, thresh=0.5) # 分数比较低的目标框没有匹配到轨迹就会直接被扔掉,不会创建新的轨迹
# 遍历matches,如果state为Tracked,调用update方法,并加入到activated_stracks,否则调用re_activate,并加入refind_stracks
# 在低置信度的检测框中再次与没有被匹配到的 track 做 IOU 匹配
for itracked, idet in matches:
track = r_tracked_stracks[itracked]
det = detections_second[idet]
if track.state == TrackState.Tracked:
track.update(det, self.frame_id)
activated_starcks.append(track)
else:
track.re_activate(det, self.frame_id, new_id=False)
refind_stracks.append(track)
# 遍历u_track(第二次匹配也没匹配到的轨迹),将state不是Lost的轨迹,调用mark_losk方法,并加入lost_stracks,等待下一帧匹配
# lost_stracks加入上一帧还在持续追踪但是这一帧两次匹配不到的轨迹
# 如果 track 经过两次匹配之后还没有匹配到 box 的话,就标记为丢失了
for it in u_track:
track = r_tracked_stracks[it]
if not track.state == TrackState.Lost:
track.mark_lost()
lost_stracks.append(track)
'''Deal with unconfirmed tracks, usually tracks with only one beginning frame'''
# 尝试匹配中途第一次出现的轨迹
# 当前帧的目标框会优先和长期存在的轨迹(包括持续追踪的和断追的轨迹)匹配,再和只出现过一次的目标框匹配
detections = [detections[i] for i in u_detection]
# 计算unconfirmed和detections的iou_distance(代价矩阵)
# unconfirmed是不活跃的轨迹(过了30帧)
ious_dists = matching.iou_distance(unconfirmed, detections)
ious_dists_mask = (ious_dists > self.proximity_thresh)
if not self.args.mot20:
ious_dists = matching.fuse_score(ious_dists, detections)
if self.args.with_reid:
emb_dists = matching.embedding_distance(unconfirmed, detections) / 2.0
raw_emb_dists = emb_dists.copy()
emb_dists[emb_dists > self.appearance_thresh] = 1.0
emb_dists[ious_dists_mask] = 1.0
dists = np.minimum(ious_dists, emb_dists)
else:
dists = ious_dists
# 用match_thresh = 0.8过滤较小的iou,利用匈牙利算法进行匹配,得到matches, u_track, u_detection
matches, u_unconfirmed, u_detection = matching.linear_assignment(dists, thresh=0.7)
# 遍历matches,如果state为Tracked,调用update方法,并加入到activated_stracks,否则调用re_activate,并加入refind_stracks
# 如果能够匹配上的话,说明这个 track 已经是确定状态了,用当前匹配到的框对卡尔曼的预测进行调节,并且将其加入到 activated_starcks
for itracked, idet in matches:
unconfirmed[itracked].update(detections[idet], self.frame_id)
activated_starcks.append(unconfirmed[itracked])
# 遍历u_unconfirmed,调用mark_removd方法,并加入removed_stracks
for it in u_unconfirmed:
# 中途出现一次的轨迹和当前目标框匹配失败,删除该轨迹(认为是检测器误判)
# 真的需要直接删除吗??????
track = unconfirmed[it]
track.mark_removed()
removed_stracks.append(track)
""" Step 4: Init new stracks"""
# 遍历u_detection(前两步都没匹配成功的目标框),对于score大于high_thresh,调用activate方法,并加入activated_stracks
# 此时还没匹配的u_detection将赋予新的id
# 经过上面这些步骤之后,如果还有没被匹配的检测框,说明可能画面中新来了一个物体
# 那么就直接将他视为一个新的 track,但是这个 track 的状态并不是激活态
# 在下一次循环的时候会先将他放到 unconfirmed_track 中去,然后根据有没有框匹配他来决定是激活还是丢弃
for inew in u_detection:
track = detections[inew]
if track.score < self.new_track_thresh:
continue
# 只有第一帧新建的轨迹会被标记为is_activate=True,其他帧不会
track.activate(self.kalman_filter, self.frame_id)
# 把新的轨迹加入到当前活跃轨迹中
activated_starcks.append(track)
# 遍历lost_stracks,对于丢失超过max_time_lost(30)的轨迹,调用mark_removed方法,并加入removed_stracks
""" Step 5: Update state"""
# 对于丢失目标的 track 来说,判断他丢失的帧数是不是超过了 buffer 缓冲帧数,超过就删除
for track in self.lost_stracks:
if self.frame_id - track.end_frame > self.max_time_lost:
track.mark_removed()
removed_stracks.append(track)
""" Merge """
# print('Ramained match {} s'.format(t4-t3))
# 遍历tracked_stracks,筛选出state为Tracked的轨迹,保存到tracked_stracks
# 指上一帧匹配上的 track
self.tracked_stracks = [t for t in self.tracked_stracks if t.state == TrackState.Tracked]
# 将activated_stracks,refind_stracks合并到track_stracks
# 加上这一帧新激活的 track(两次匹配到的 track,以及由 unconfirm 状态变为激活态的 track)
self.tracked_stracks = joint_stracks(self.tracked_stracks, activated_starcks)
# 加上丢帧目标重新被匹配的 track
self.tracked_stracks = joint_stracks(self.tracked_stracks, refind_stracks)
# 遍历lost_stracks,去除tracked_stracks和removed_stracks中存在的轨迹
# self.lost_stracks 在经过这一帧的匹配之后如果被重新激活的话就将其移出列表
self.lost_stracks = sub_stracks(self.lost_stracks, self.tracked_stracks)
# 将这一帧丢失的 track 添加进列表
self.lost_stracks.extend(lost_stracks)
# self.lost_stracks 如果在缓冲帧数内一直没有被匹配上被 remove 的话也将其移出 lost_stracks 列表
self.lost_stracks = sub_stracks(self.lost_stracks, self.removed_stracks)
# 更新被移除的 track 列表
self.removed_stracks.extend(removed_stracks)
# 调用remove_duplicate_stracks函数,计算tracked_stracks,lost_stracks的iou_distance,对于iou_distance<0.15的认为是同一个轨迹,
# 对比该轨迹在track_stracks和lost_stracks的跟踪帧数和长短,仅保留长的那个
# 将这两段 track 中重合度高的部分给移除掉(暂时还不是特别理解为啥要这样)
self.tracked_stracks, self.lost_stracks = remove_duplicate_stracks(self.tracked_stracks, self.lost_stracks)
# get scores of lost tracks
# 遍历tracked_stracks,将所有的is_activated为true的轨迹输出 得到最终的结果,也就是成功追踪的 track 序列
# output_stracks = [track for track in self.tracked_stracks if track.is_activated]
output_stracks = [track for track in self.tracked_stracks]
return output_stracks
4. 方法
# 将 tlista 和 tlistb 的 track 给合并成一个大的列表
def joint_stracks(tlista, tlistb): # 确定轨迹 + 丢失轨迹
exists = {}
res = []
for t in tlista:
exists[t.track_id] = 1
res.append(t)
for t in tlistb:
tid = t.track_id
if not exists.get(tid, 0):
exists[tid] = 1
res.append(t)
return res
# 取两个 track 的不重合部分
def sub_stracks(tlista, tlistb):
stracks = {}
for t in tlista:
stracks[t.track_id] = t
for t in tlistb:
tid = t.track_id
if stracks.get(tid, 0):
del stracks[tid]
return list(stracks.values())
# 如果两段 track 离得很近的话,就要去掉一个
# 根据时间维度上出现的帧数多少来决定移除哪一边的 track
def remove_duplicate_stracks(stracksa, stracksb): # self.tracked_stracks, self.lost_stracks
pdist = matching.iou_distance(stracksa, stracksb)
pairs = np.where(pdist < 0.15)
dupa, dupb = list(), list()
for p, q in zip(*pairs):
timep = stracksa[p].frame_id - stracksa[p].start_frame
timeq = stracksb[q].frame_id - stracksb[q].start_frame
if timep > timeq:
dupb.append(q)
else:
dupa.append(p)
resa = [t for i, t in enumerate(stracksa) if not i in dupa]
resb = [t for i, t in enumerate(stracksb) if not i in dupb]
return resa, resb

























 7887
7887

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









