






挑战赛复现-SCIT-MCMT-Tracking
[CVPRW2023] “Leveraging Future Trajectory Prediction for Multi-Camera People Tracking”
NVIDIA城市应用挑战赛
原始地址:https://github.com/yuntaeJ/SCIT-MCMT-Tracking#cvprw2023-leveraging-future-trajectory-prediction-for-multi-camera-people-tracking
本地只做验证,由于数据集不够,故训练略:
第一步:克隆对应库
git clone https://github.com/yuntaeJ/SCIT-MCMT-Tracking.git
第二步:按照教程所示:
以原始的ervironment.yaml为根,用conda创建虚拟环境和对应的依赖
conda env create --file environment.yaml
conda activate scit
执行 sh setup.sh
sh setup.sh
这里有几个点需要注意:
- setup.sh中使用到了
pip3 install 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
但是在国内网中发现这个文件访问失败,疑似是国内网的原因。因此,我们将它通过其它手段克隆下来
git clone https://github.com/cocodataset/cocoapi.git
随后cd 到cocoapi/PythonAPI中
pip install .
执行安装,这样就能成功安装
- 安装mmcv-full
pip3 install mmcv-full==1.7.1
无法直接安装,会提示报错
应该按照这样的方式安装
pip install -U openmim
mim install mmcv-full==1.7.0
这样就成功安装了
第三步:下载对应的权重文件
分别是pretrained-YOLOX-X.pth,yolov7-pose-estimation、pretrained-social-implicit.pth和 homography_list.pkl
如果需要用自己的数据训练的话:
则根据目标检测训练pretrained-YOLOX-X.pth
根据姿态估计训练yolov7-pose-estimation
根据Social-Implicit上提供的轨迹姿态训练进行训练
第四步:执行单摄像头跟踪
sh run_scmt.sh

执行后命令行:
原始文本下出现了track_vis文件夹,这是处理后的文件夹
里面存放标签文本和预测后的视频文件
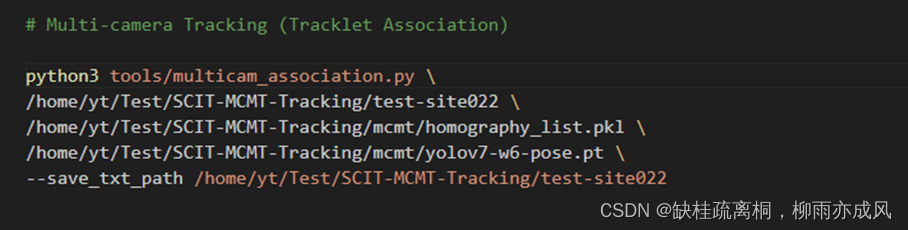
第五步:执行多摄像机跟踪
sh run_mcmt.sh
将第一步得到的标签文件改成label.txt
这里需要下载 https://github.com/RizwanMunawar/yolov7-pose-estimation 并将其文件合并到项目主路径下
需要将权重文件复制到 tools文件夹下
执行后
最后得到了sorted_associated.txt

后续 得到的这个sorted_associated.txt
可以得到多个摄像机的关联目标写一个cv脚本,将这个数据关联起来,就可以得到切换的数据了















 849
849











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









