







一、描述
写关于环境搭建的文章,是因为有些环境的安装会占用大量的时间,可能还没入门就放弃了。
曾今的我也以为以后下载东西会越来月容易,结果错了,比如给树莓派,以前树莓派的ubuntu18.04直接的桌面版没有直接下载了,连20.04也没有,然后使用服务器版本,再为其安装桌面,不给力呀,耗时耗力,而且有bug,特别是接大屏幕时。
所以目前这里我建议使用ubuntu mate 20.04版本,然后使用Noetic版本的ROS,直接百度搜索ubuntu mate,找到其官网进入即可。我下面提供ubuntu mate 20.04 百度云连接。
对于树莓派如何使用ubuntu系统,我就不讲解了,我默认你会使用linux常用指令,linux开发环境搭建,使用linux进行项目开发,使用过树莓派,或香橙派等等。
这里我提供一下镜像和工具,因为以后可能下载不到了,当然时代在发展,以后的设备会有更高的性能。
ubuntu mate 20.04 镜像(ARM版本)
链接:https://pan.baidu.com/s/1B2EaDVpMuABO7Fk4RTPH8Q
提取码:phtn其他镜像烧写工具
链接:https://pan.baidu.com/s/1LDfBmiM-b1uoWnRj6ihftQ
提取码:5zcd
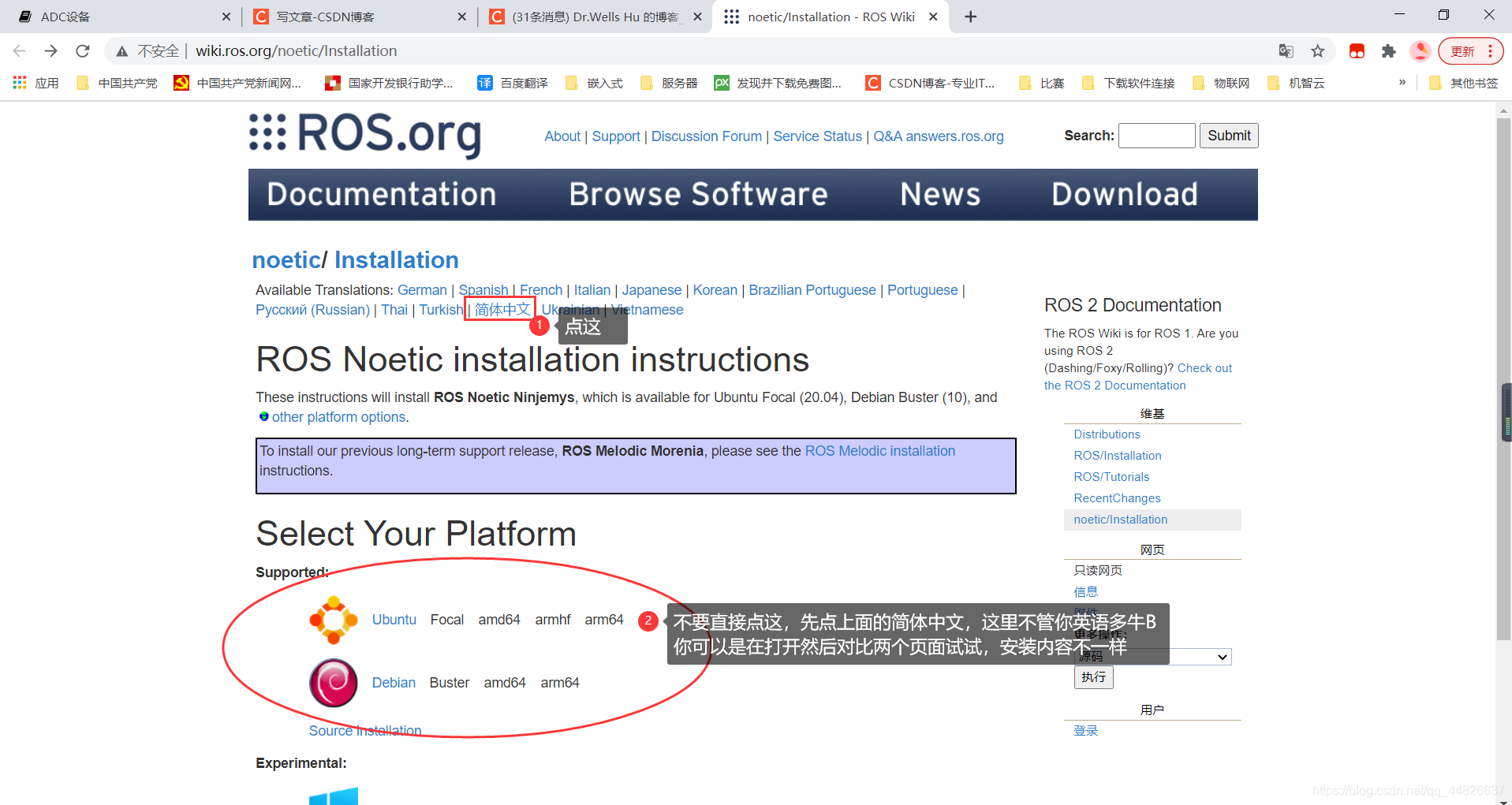
二、树莓派安装ROS Noetic
对于ROS的安装,得特别注意选择 简体中文 页面,然后在在那个中文页面上选择ros版本下载,因为那相当于是适配我们下载的通道,而且还决定着ROS秘钥获取的路径,秘钥获取不成功,那肯定是安装不了ROS的(会一直提示没有找到该软件包)。

三、安装ROS Noetic 过程
设置sources.list
设置电脑以安装来自packages.ros.org的软件。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
开始安装
首先,确保你的Debian软件包索引是最新的:
sudo apt update
然后选择你想安装“多少部分”的ROS:
完整桌面版安装(Desktop-Full,推荐):除了桌面版的全部组件外,还包括2D/3D模拟器(simulator)和2D/3D 感知包(perception package)。
sudo apt install ros-noetic-desktop-full
设置环境
你需要在使用ROS的每个bash终端中source这个脚本。
source /opt/ros/noetic/setup.bash
而下面这些命令可以在每次启动新的shell窗口时很方便地为你自动source一下这个脚本:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
四、小结
简体中文版本安装教程,到此就完成了。详细的可以自己去ROS官网查看,那有许多教程,可以让你入门,还有许多大佬写好的开源软件包可供下载。
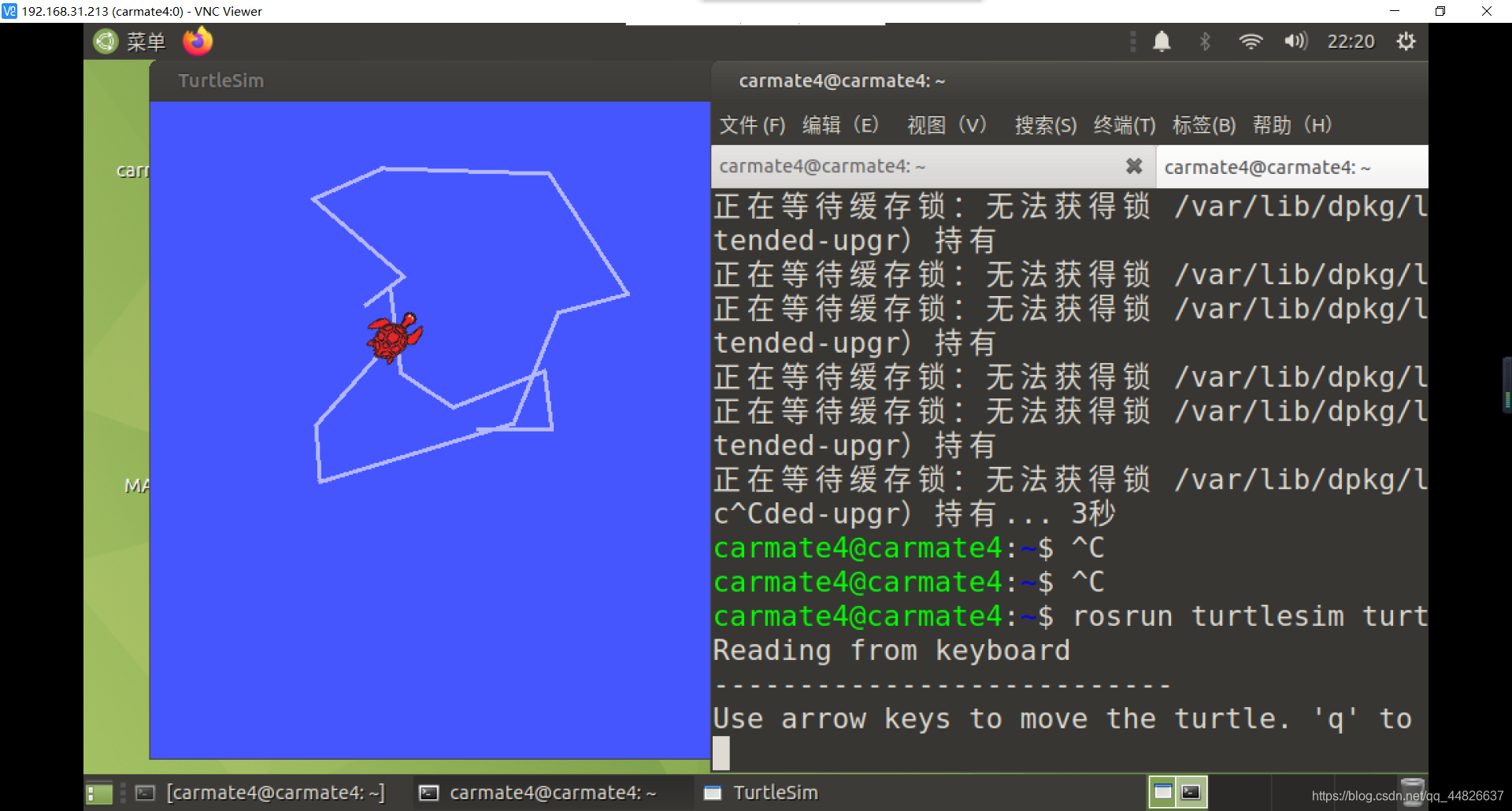
当然,安装好环境以后,你得启动ROS,启动小乌龟和键盘控制节点,这才算是ROS的helloworld。

















 2443
2443

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









