







 本文详细介绍了如何使用STM32F407通过CubeMX配置RCC和时钟,设置SYSDebug,UART通讯,TIM定时器和GPIO,特别是针对连接DRV8323S的GPIO端口。然后,重点讲述了SPI通信设置,包括SPI3的配置和SPI读写函数,以及SPI与DRV8323S的交互,以实现芯片的初始化和状态检查。最后,提供了Keil中的SPI通信相关代码片段。
本文详细介绍了如何使用STM32F407通过CubeMX配置RCC和时钟,设置SYSDebug,UART通讯,TIM定时器和GPIO,特别是针对连接DRV8323S的GPIO端口。然后,重点讲述了SPI通信设置,包括SPI3的配置和SPI读写函数,以及SPI与DRV8323S的交互,以实现芯片的初始化和状态检查。最后,提供了Keil中的SPI通信相关代码片段。
文章概览
😶🌫️说在最前面 + 实现功能
最近在埋头搞STM32 + 无刷直流电机控制,想实现用自己的STM32F407VGT6芯片板子,外加一块驱动板(目前选用到TI的DRV8302或者DRV8323驱动芯片),搞定电机驱动,最后实现比较好的控制效果。如果不是同一块芯片的同学也不用急着走,大体上都是可借鉴哒~
本文主要实现使用SPI通信,通过STM32F407控制芯片来对DRV8323S驱动芯片进行配置,为使用DRV8323做好准备。
目标操作: 不启动电机,仅使能DRV8323S芯片。使用SPI朝DRV8323S芯片写几个地址的配置,然后再读取这几个位置的状态,检查是否通信正常。调试过程借助Keil的Debug功能中 watch变量的值,或使用UASRT串口通信打印出信息,来检查。
如果文章中有什么错误和待改进的地方,欢迎在评论区指出交流,共同学习和进步!✊
首先是一系列用CubeMX的配置操作。
👀 1 CubeMX - RCC & Clock Configuration时钟配置
🥽 1.1 【System Core】 – 【RCC】
HSE – Crystal/Ceramic Resonator
高速时钟源 – 外部晶振
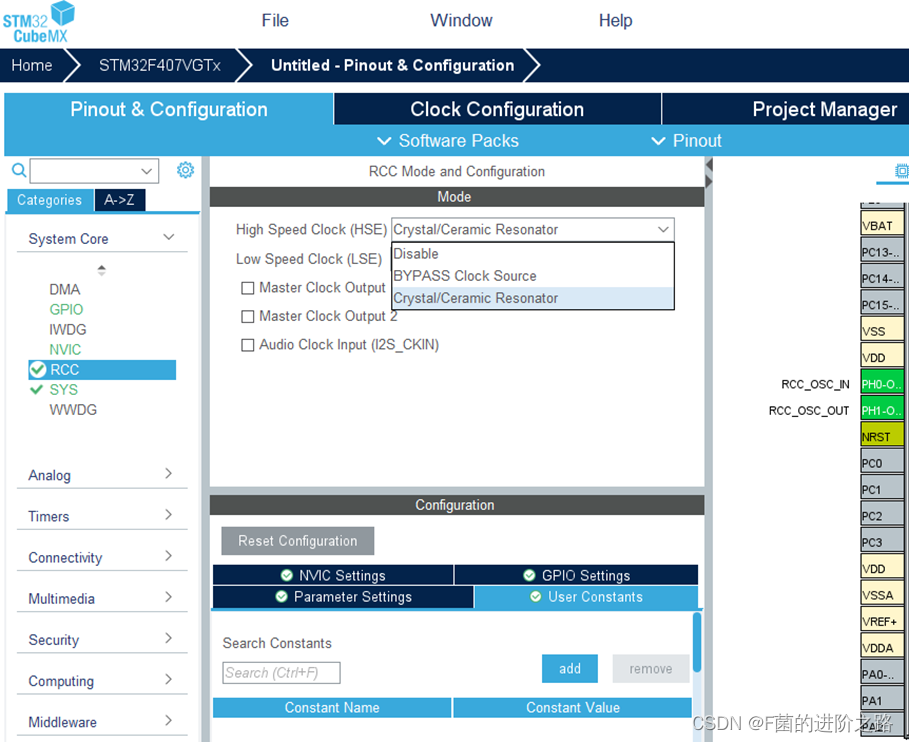
会自动分配好管脚RCC_OSC_IN & RCC_OSC_OUT:
PH0 – RCC_OSC_IN
PH1 – RCC_OSC_OUT.
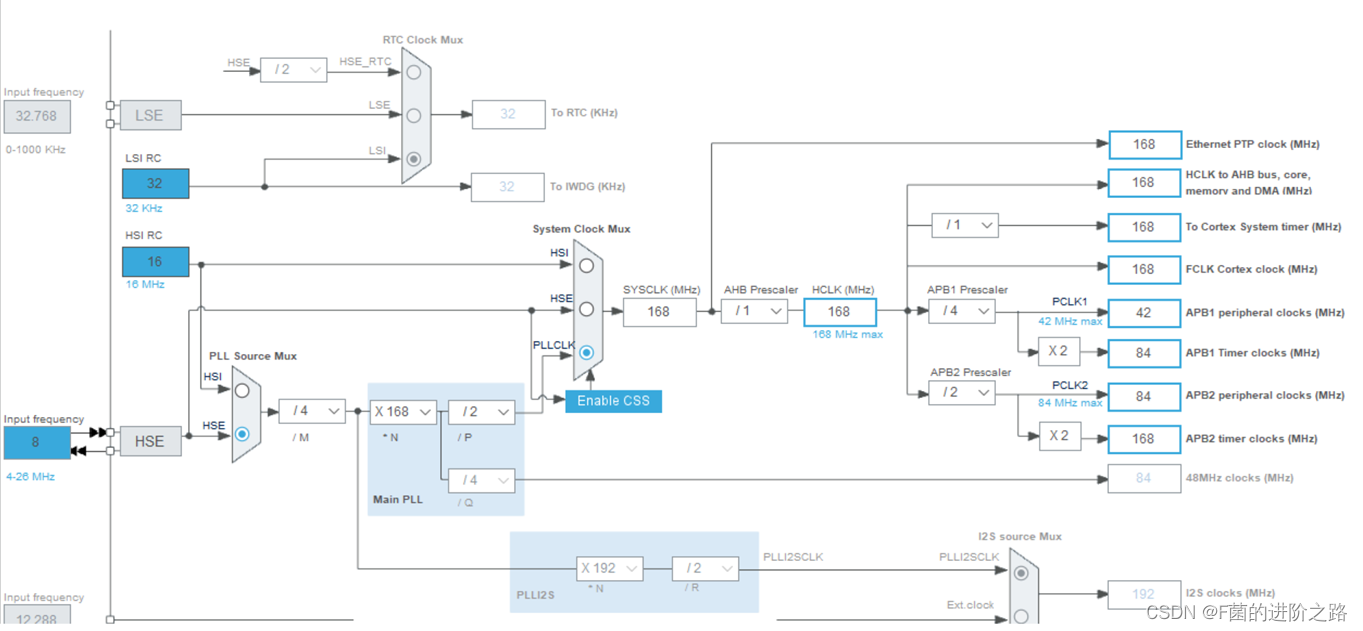
🥽 1.2 【Clock Configuration】
系统定时器配置Cortex System timer – 168MHz
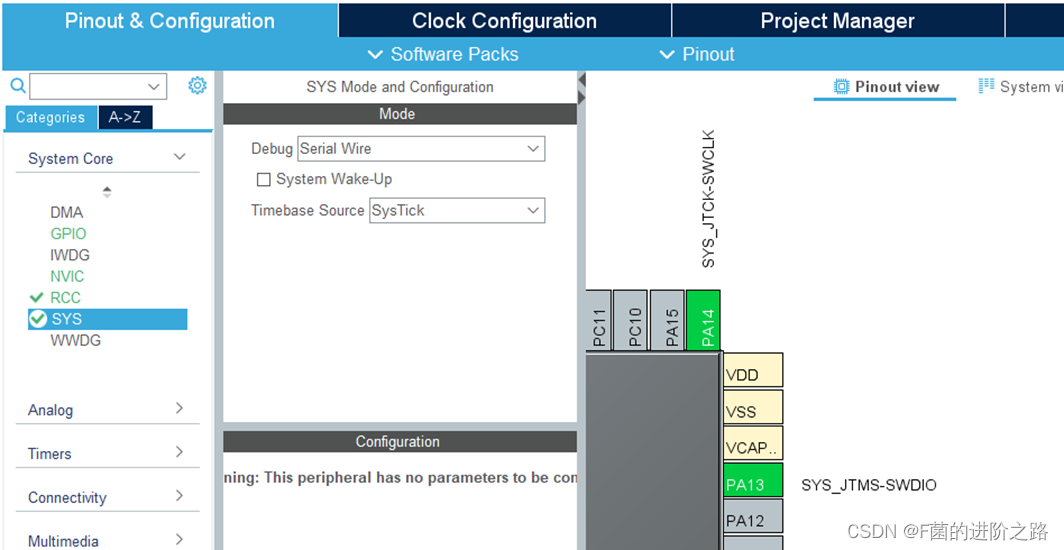
👀 2 CubeMX -SYS Debug设置
🌠>> SYS Mode and Configuration
Debug – Serial Wire
Timebase Source – SysTick(后续若使用到RTOS,则需改成如TIM7的没用到的定时器!)
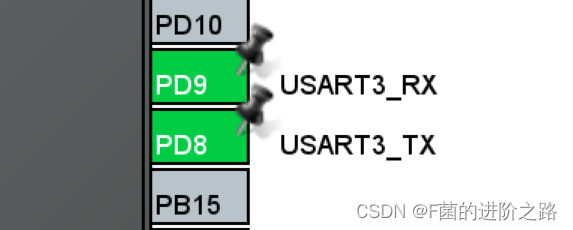
👀 3 CubeMX -UART通讯设置
USART3 —— 暂定用它接收(来自上位机的)控制电机指令
PD8-USART3_TX
PD9-USART3_RX
🌠>> USART3 – Mode
| Item | Setting |
|---|---|
| Mode | Asynchronous异步模式 |
| Hardware Flow Control (RS232) | Disable |
🌠>> Parameter Settings – Basic Parameters
| Item | Setting |
|---|---|
| Baud Rate | 115200 Bits/s |
| Word Length | 8 Bits (including Parity) |
| Parity | None |
| Stop Bits | 1 |
🌠>> Parameter Settings – Advanced Parameters
| Item | Setting |
|---|---|
| Data Direction | Receive and Transmit |
| Over Sampling | 16 Samples |
🌠>> NVIC Settings
中断使能,优先级(0,0)。

🌠>> GPIO Settings
| Item | Setting |
|---|---|
| GPIO mode | Alternate Function Push Pull |
| GPIO Pull-up/Pull-down | Pull-up 注意⭐ |
| Maximum output speed | Very high |
👀 4 CubeMX - TIM定时器设置
TIM8-PWM+TIM4-HALL+TIM6简单定时
本文暂时略
👀 5 CubeMX - GPIO设置
KEY+LED+PWM低桥臂
本文暂时略
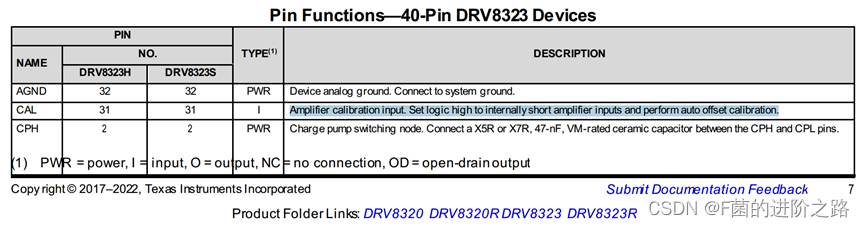
👀 6 CubeMX - GPIO设置:连接DRV8323S的一些端口⭐


🥽 6.1 (STM32 - out) PA9 👈–👉 CAL (DRV8323S - in)
放大器校准输入。设置逻辑高时,内部短接放大器输入,并执行自动偏移校准。完成校准后引脚还要恢复低位,才能正常执行后续测量操作。
🪜详见数据手册【8.3.4.3 Auto Offset Calibration – P44】
🌠>> GPIO Settings
| Item项目 | Setting设定 |
|---|---|
| GPIO Output Level | Low(引脚低电平) |
| GPIO mode | Output Push Pull(输出推挽模式) |
| GPIO Pull-up/Pull-down | No pull-up and no pull-down |
| Maximum output speed | High(引脚高速) |
暂时不用自动校准功能!因此初始就让PA9输出低电平。
🥽6.2 (STM32 - out) PA10 👈–👉 ENABLE (DRV8323S – in,EN_GATE)
栅极驱动器启用。当该引脚为逻辑低时,设备进入低功率睡眠模式。8至40µs的低脉冲可用于重置故障条件。
🪜详见数据手册【8.4.1.1 Sleep Mode – P50】

🌠>> GPIO Settings
| Item项目 | Setting设定 |
|---|---|
| GPIO Output Level | Low(引脚低电平) |
| GPIO mode | Output Push Pull(输出推挽模式) |
| GPIO Pull-up/Pull-down | No pull-up and no pull-down |
| Maximum output speed | High(引脚高速) |
初始让PA10输出低电平,要使能DRV8323S芯片时,把引脚输出改为高电平。
🥽6.3 (STM32 - X) 无 👈–👉 nFAULT (DRV8323S – open-drain output) – 单片机连D11发光二极管
暂时不额外连STM32引脚来读状态(应该也可以连?目前我的板子版本未连),如果发光二极管D11亮了,则说明出故障了。
🪜详见数据手册【8.3.6 Gate Driver Protective Circuits – P47】

外部硬件电路给他上拉了,出现故障时,nFAULT pin输出逻辑低,对应发光二极管D11亮。
👀 7 CubeMX - SPI通信设置:用来和DRV8323通讯,配置PWM+发送错误信息⭐
🪜相关寄存器的配置备忘详见我的另一篇Blog:【DRV8323】电机驱动芯片寄存器配置指南,通过STM32F407的SPI通信配置。
SPI - Serial Peripheral Interface串行外围设备接口
SPI3是APB1上的设备,APB1 peripheral clocks = 42MHz,最高通信速率为 21Mbits/s。
SPI3_nSCS需要用GPIO单独配置,另外三个是SPI3自动配置的。
| 引脚名 | STM32自命名 | 原理图中引脚命名 |
|---|---|---|
| PD1 | SPI3_nSCS | NSCS(片选)【❗这个是GPIO_Output单独设!】 |
| PC10 | SPI3_SCK | SPI_SCLK (时钟) |
| PC11 | SPI3_MISO | SPI_SDO (从机DRV8323输出数据,主机STM32输入。连DRV8323的SDO口) |
| PC12 | SPI3_MOSI | SPI_SDI (主机STM32输出数据,发给从机DRV8323。连DRV8323的SDI口) |


🥽7.1 Connectivity – SPI 3
🌠>> SPI3 – Mode
| Item项目 | Setting设定 |
|---|---|
| Mode | Full-Duplex Master (全双工主机模式) |
| Hardware NSS Signal | Disable(不是硬件控制) |
🌠>> Parameter Settings – Basic Parameters
| Item项目 | Setting设定 |
|---|---|
| Frame Format | Motorola |
| Data Size | 16 Bits |
| First Bit | MSB First |
🌠>> Parameter Settings – Clock Parameters
| Item项目 | Setting设定 |
|---|---|
| Prescaler (for Baud Rate) | 16 (❗一定要至少选16,稍微小一点都会因为太快了数据出错!) |
| Baud Rate | 2.625 MBits/s |
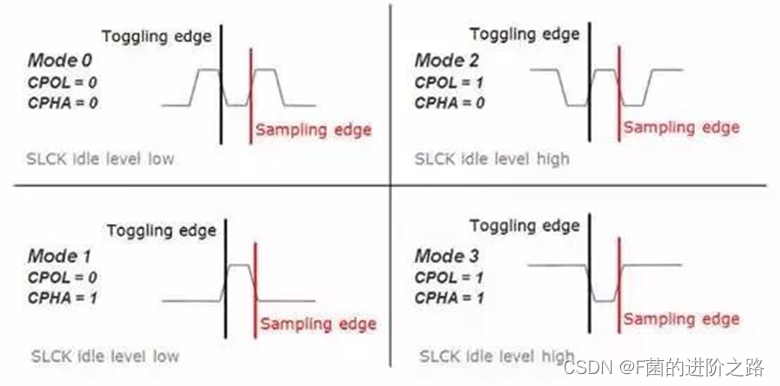
| Clock Polarity (CPOL) | Low (空闲态时,SCLK处于低电平) |
| Clock Phase (CPHA) | 2 Edge(CPHA=1) |
🌠>> Parameter Settings – Advanced Parameters
| Item项目 | Setting设定 |
|---|---|
| CRC Calculation | Disabled |
| NSS Signal Type | Software |
🥽7.2 System Core – GPIO
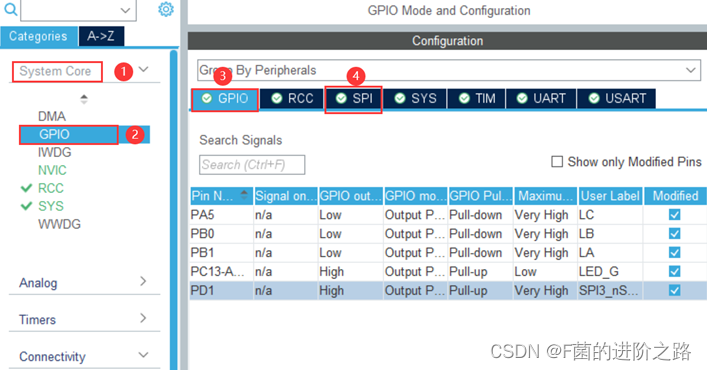
🌠>> GPIO - PD1 Configuration
| Item项目 | Setting设定 |
|---|---|
| GPIO Output Level | High(初始状态引脚高电平,低电平有效) |
| GPIO mode | Output Push Pull(输出推挽模式) |
| GPIO Pull-up/Pull-down | No pull-up and no pull-down |
| Maximum output speed | Very High |
| User Label | SPI3_nSCS |
🌠>> GPIO - SPI - PC10&PC11&PC12 Configuration
(?作者存疑点:PC11在CubeMX默认是输出状态?实现功能来说应该是输入)
| Item项目 | Setting设定 |
|---|---|
| GPIO mode | Alternate Function Push Pull |
| GPIO Pull-up/Pull-down | No Pull-up and no Pull-down |
| Maximum output speed | Very High |
👀 8 Keil - SPI通信相关代码摘录
【motor_drv8323.c】代码(含寄存器和HAL库函数对比的详细版本)👇
/**
******************************************************************************
* @file motor_drv8323.c
* @date 2023-05-08
* @brief 驱动芯片DRV8323相关 - STM32 F407
******************************************************************************
*/
#include "motor_drv8323.h"
uint16_t TIMP01, TIMP02, TIMP03, TIMP04, TIMP05;
uint16_t TIMP1, TIMP2, TIMP3, TIMP4, TIMP5;
/**
* @brief 【MOTOR-DRV8323 SPI通信】
* 配置 DRV8323工作状态
* @function 0 - SPI读&写一体化函数 16位 - HAL库函数版本
* @function 1 - SPI 读 & 写16bit函数 - 寄存器版本
* @function 2 - DRV8323写入函数 16位 - 寄存器版本
* @function 3 - DRV8323读取函数 16位 - 寄存器版本
* @function 4 - SPI功能异常提示函数
* @function 5 - 用SPI配置DRV8323的函数 (操作封装)
*/
// 0 - SPI读&写一体化函数 16位 - HAL库函数版本 【要么用后三个,要么就用这个】
uint16_t SPI_ReadWrite_DRV8323(uint16_t ReadAddr)
{
uint16_t value;
SPI3_nSCS_LOW(); // SPI3-nSCS 拉低使能 //HAL_GPIO_WritePin(GPIOD, GPIO_PIN_1, GPIO_PIN_RESET);
//HAL_Delay(500); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
HAL_SPI_TransmitReceive(&hspi3, (uint8_t*)&ReadAddr, (uint8_t*)&value, 1, 1000); // 通过一个强制转换“骗过”库函数接口
//HAL_Delay(500); // 如果 LOW & HIGH 操作是使用的BSRR寄存器操作版本,需要加上延时,否则速度太快可能会出错!
SPI3_nSCS_HIGH(); // SPI3-nSCS 拉高关断 //HAL_GPIO_WritePin(GPIOD, GPIO_PIN_1, GPIO_PIN_SET);
HAL_Delay(500);
return value;
}
// 1 - SPI读&写16bit函数 - 寄存器版本
uint16_t SPI_ReadWrite16bit(uint16_t ReadAddr)
{
int SPITimeout = SPIT_FLAG_TIMEOUT; // 等待超时时间 设为0x1000
// Loop while DR register in not emplty 等待发送缓冲区为空,TXE 事件
while (__HAL_SPI_GET_FLAG( &hspi3, SPI_FLAG_TXE ) == RESET)
{
if((SPITimeout--) == 0 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 8854
8854

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









