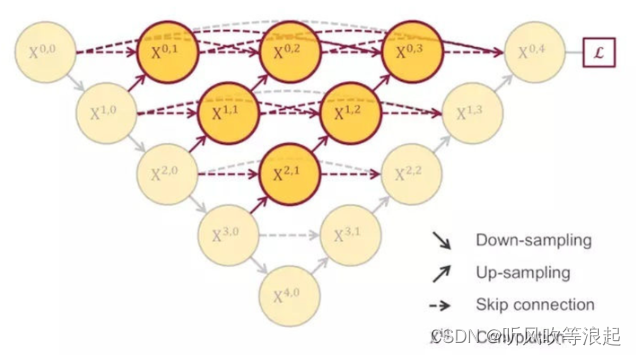
以下是基于Pytorch实现的医学图像语义分割Unet++的代码:
```python
import torch
import torch.nn as nn
from torchvision import models
class ConvBlock(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=True, bn=True):
super(ConvBlock, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding, bias=bias)
self.bn = nn.BatchNorm2d(out_channels) if bn else None
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
if self.bn is not None:
x = self.bn(x)
x = self.relu(x)
return x
class UpConv(nn.Module):
def __init__(self, in_channels, out_channels, upscale_factor, mode='transpose', align_corners=True):
super(UpConv, self).__init__()
self.upscale_factor = upscale_factor
self.align_corners = align_corners
if mode == 'transpose':
self.conv = nn.ConvTranspose2d(in_channels, out_channels, kernel_size=2*self.upscale_factor,
stride=self.upscale_factor, padding=self.upscale_factor//2,
output_padding=self.upscale_factor%2, bias=True)
else:
self.conv = nn.Sequential(
nn.Upsample(scale_factor=self.upscale_factor, mode=mode, align_corners=self.align_corners),
nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=True)
)
def forward(self, x):
return self.conv(x)
class NestedUNet(nn.Module):
def __init__(self, in_channels=1, out_channels=2, init_features=32):
super(NestedUNet, self).__init__()
self.down1 = nn.Sequential(
ConvBlock(in_channels, init_features, bn=False),
ConvBlock(init_features, init_features*2)
)
self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)
self.down2 = nn.Sequential(
ConvBlock(init_features*2, init_features*2*2),
ConvBlock(init_features*2*2, init_features*2*2*2)
)
self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)
self.down3 = nn.Sequential(
ConvBlock(init_features*2*2*2, init_features*2*2*2*2),
ConvBlock(init_features*2*2*2*2, init_features*2*2*2*2*2)
)
self.pool3 = nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)
self.down4 = nn.Sequential(
ConvBlock(init_features*2*2*2*2, init_features*2*2*2*2*2),
ConvBlock(init_features*2*2*2*2*2, init_features*2*2*2*2*2*2)
)
self.pool4 = nn.MaxPool2d(kernel_size=2, stride=2, ceil_mode=True)
self.bottom = nn.Sequential(
ConvBlock(init_features*2*2*2*2*2, init_features*2*2*2*2*2*2),
ConvBlock(init_features*2*2*2*2*2*2, init_features*2*2*2*2*2*2),
UpConv(init_features*2*2*2*2*2*2, init_features*2*2*2*2*2, upscale_factor=2)
)
self.up4 = nn.Sequential(
ConvBlock(init_features*2*2*2*2*2, init_features*2*2*2*2*2),
ConvBlock(init_features*2*2*2*2*2, init_features*2*2*2*2),
UpConv(init_features*2*2*2*2, init_features*2*2, upscale_factor=2)
)
self.up3 = nn.Sequential(
ConvBlock(init_features*2*2*2*2, init_features*2*2),
ConvBlock(init_features*2*2, init_features*2),
UpConv(init_features*2, init_features, upscale_factor=2)
)
self.up2 = nn.Sequential(
ConvBlock(init_features*2*2, init_features),
ConvBlock(init_features, init_features),
UpConv(init_features, init_features//2, upscale_factor=2)
)
self.up1 = nn.Sequential(
ConvBlock(init_features, init_features//2),
ConvBlock(init_features//2, out_channels)
)
def forward(self, x):
x1 = self.down1(x)
x2 = self.pool1(x1)
x2 = self.down2(x2)
x3 = self.pool2(x2)
x3 = self.down3(x3)
x4 = self.pool3(x3)
x4 = self.down4(x4)
btm = self.pool4(x4)
btm = self.bottom(btm)
x4 = torch.cat([btm, x4], dim=1)
x4 = self.up4(x4)
x3 = torch.cat([x4, x3], dim=1)
x3 = self.up3(x3)
x2 = torch.cat([x3, x2], dim=1)
x2 = self.up2(x2)
x1 = torch.cat([x2, x1], dim=1)
x1 = self.up1(x1)
return x1
```
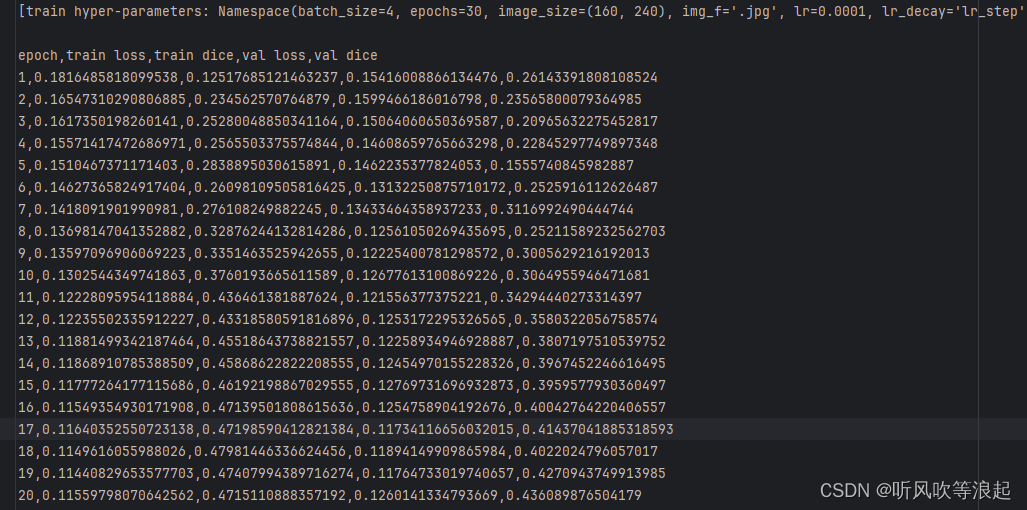
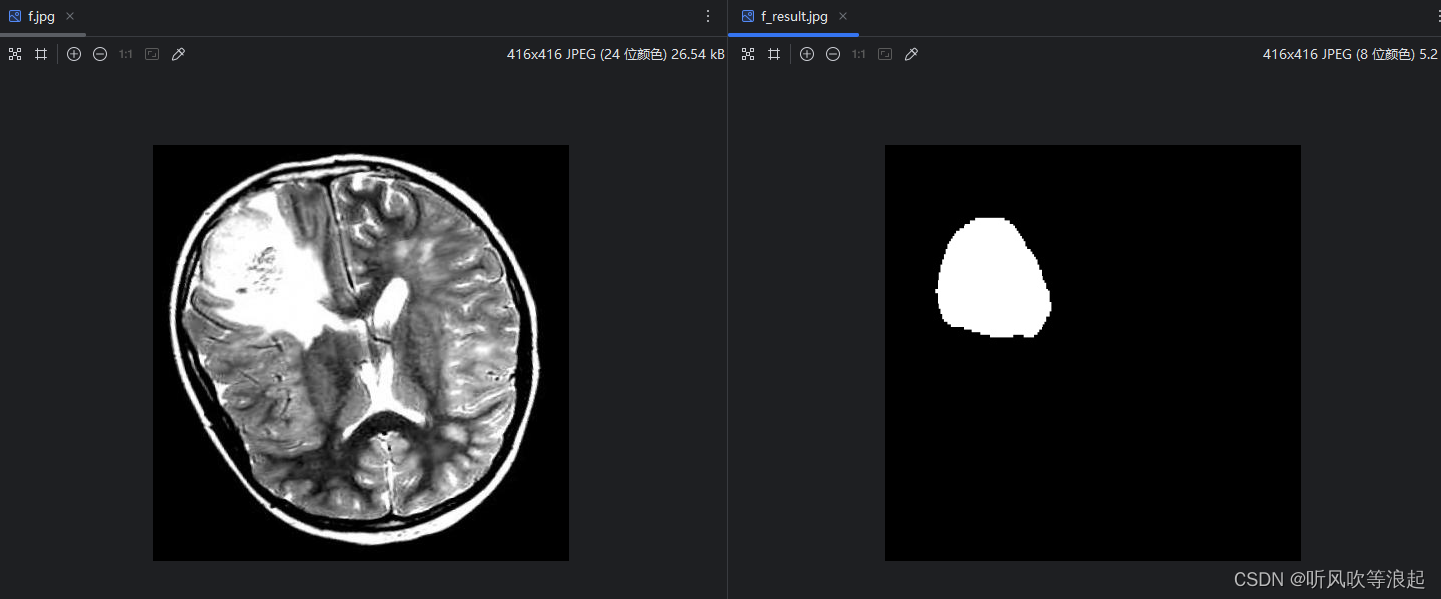
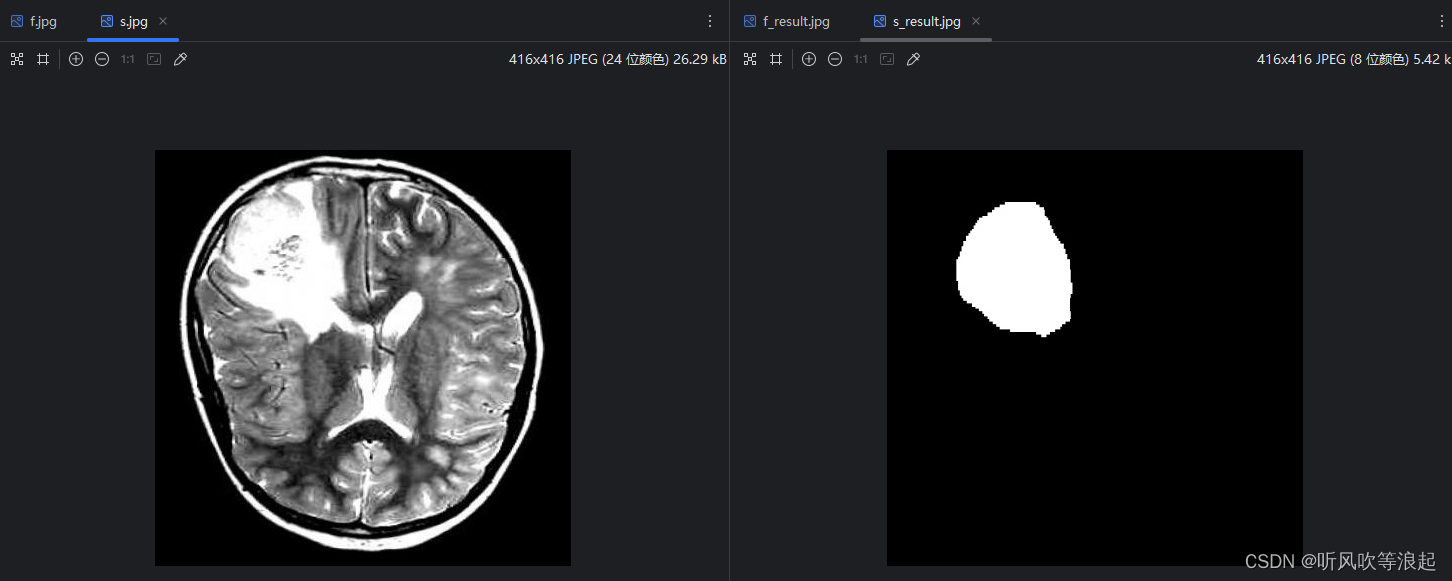
这段代码实现了一个基于Pytorch的NestedUNet模型,包含四个下采样/池化层和四个上采样/卷积层。其中,第一个下采样/池化层的输出被送入第二个下采样/池化层,以此类推。最后的bottom层会将最后一层下采样/池化层的输出送入上采样/卷积层,以生成最终的分割结果。






























 5713
5713











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











