






一、安全检查
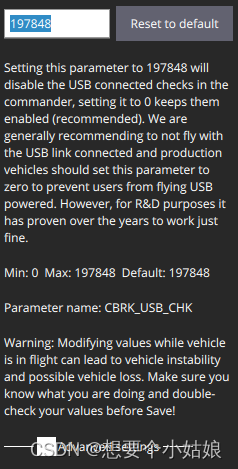
1. CBRK_USB_CHK(USB连接检查)
检查USB连接飞控,若连接则不允许解锁,默认情况下有USB连接时是无法解锁的,如果需要插USB解锁,需要设置为 197848
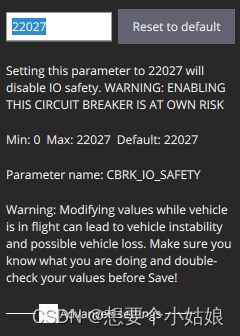
2. CBRK_IO_SAFETY(安全开关检查)
检查安全开关,安全开关未打开则不允许解锁,默认情况下需要打开安全开关才能解锁,如果需要禁用安全开关,则将其参数设置为 22027
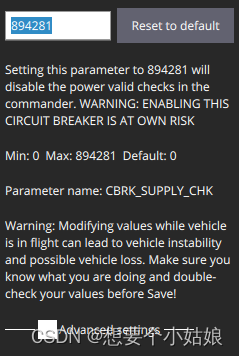
3. CBRK_SUPPLY_CHK(电池检查)
检查电池,如果没有检测到电池则不允许解锁,默认情况下需要检测到电池才能解锁,如果需要禁用电池检查,则将其参数设置为 894281
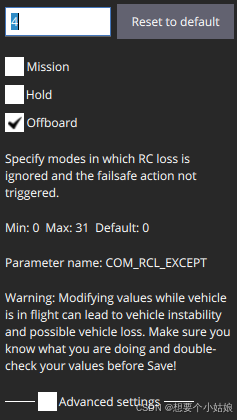
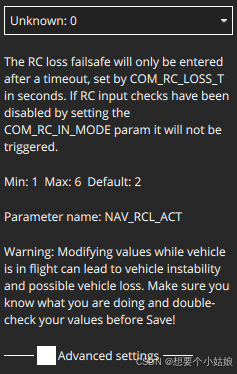
4. COM_RCL_EXCEPT 和 NAV_RCL_ALT(没有遥控器时的默认模式)
在软件在环方针中,通常需要在没有遥控器的情况解锁飞机,这时需要修改这个参数
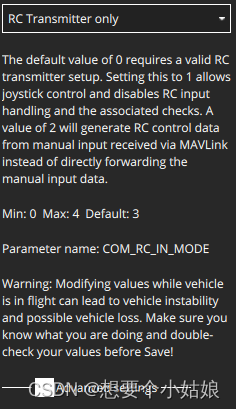
5. COM_RC_IN_MODE(模式切换)
设置飞控模式切换方式,建议仅使用遥控器进行模式切换
二、定高模式数据来源
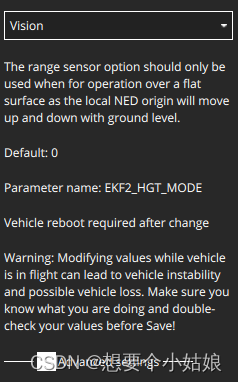
1. EKF2_HGT_MODE
默认通过气压计 Barometric pressure 来获取高度数据,可以将其设置为视觉 Vision 从而通过视觉获取高度数据
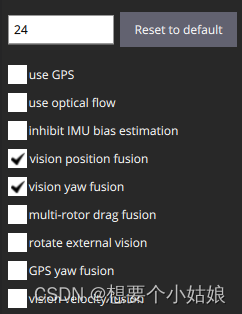
2. EKF2_AID_MASK
默认使用 GPS 来实现 EKF 融合,可以将其值设置为 24,通过视觉位置和视觉偏航来进行 EKF 融合
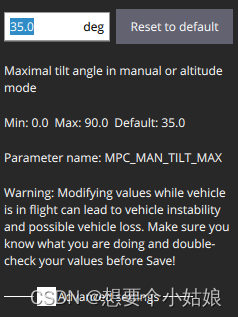
3. 设置自稳和定高模式最大倾斜角度
三、机载计算机通信设置
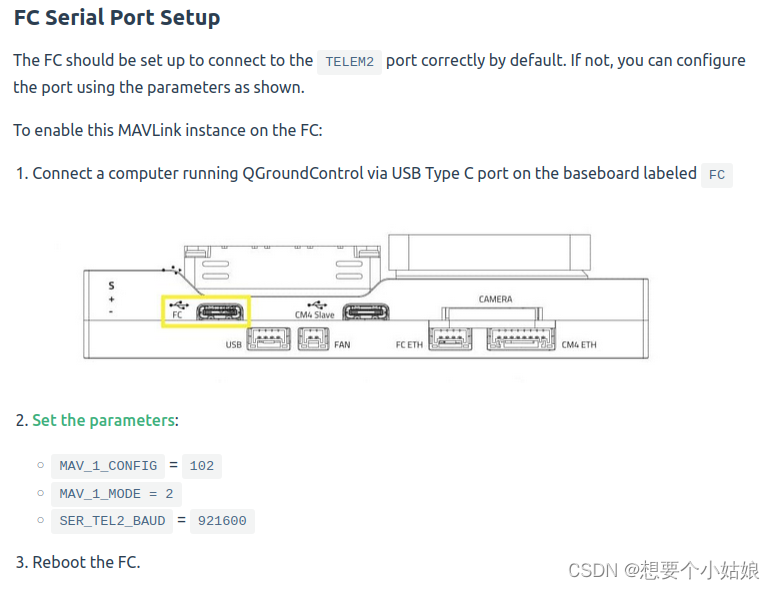
官方推荐使用 TLELM 2 端口进行连接机载计算机(companion computer)
1. MAV_X_CONFIG(其中 X 代表数字)
设置 MAVLink 信息通信的端口,将 MAV_1_CONFIG 的值设置为 102,即可在 TELEM 2 端口进行 MAVLink 信息的通信,需要重启飞控使配置生效
Parameter Reference | PX4 User Guide

2. MAV_X_MODE(其中 X 为数字)
官方推荐在 MAV_1_CONFIG = 102 的情况下,将 MAV_1_MODE 设置为 2, 也就是 Onboard 模式
Holybro Pixhawk RPi CM4 Baseboard | PX4 User Guide
Parameter Reference | PX4 User Guide

3. SER_TELX_BAUD(其中 X 为数字)
设置端口的波特率,官方推荐在 MAV_1_CONFIG = 102 的情况下,将 MAV_1_MODE = 2 的情况下,将 SER_TEL2_BAUD 设置为 921600
Holybro Pixhawk RPi CM4 Baseboard | PX4 User Guide
如果飞控没有 TELEM 2 端口,并且飞控也不需要连接数传,也可以设置 TELEM 1 口与机载电脑通信,具体而言就是设置以下参数
MAV_0_CONFIG = 101
MAV_0_MODE = 0
SER_TEL1_BAUD = 921600
其中 MAV_0_MODE 的值可以直接设置为 0,也就是 Normal
四、 GPS 模块设置
1. GPS_X_CONFIG(其中 X 为数字)
设置 GPS 通信端口,默认设置 GPS_1_CONFIG 的值为 201,也就是 GPS 1 端口
Parameter Reference | PX4 User Guide

五、常见的解锁失败报错
1. 报错加速度偏移过大
可以把 COM_ARM_EKF_AB 参数值调大,在 1.13 以后的版本中把 EKF2_ABL_LIM 调大

2. 报错陀螺仪偏移过大
可以把 COM_ARM_EKF_GB 参数值调大

3. 报错罗盘某个度数没包含
可以将 COM_ARM_MAG_ANG 值设置为 -1

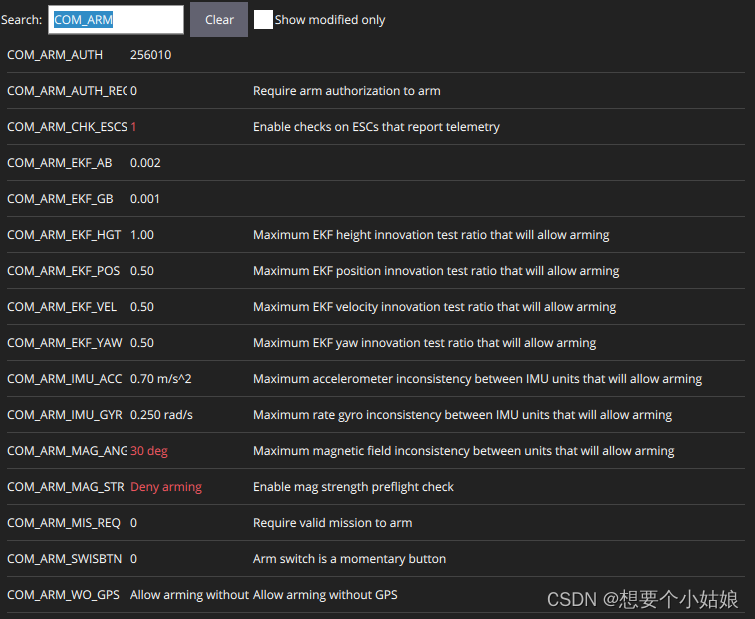
4. 其他报错无法解锁
可以搜索 COM_ARM,查看报错相关的参数,可以设置其对应的值
5. 报错 GPS 信号获取失败
如果 GPS 搜星少,长时间没有进入 GPS 定位,或者未安装 GPS 模块,可以把 EKF2_GPS_CHECK 的值设置为 0


















 3404
3404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









