






一、配置空间
1.定义
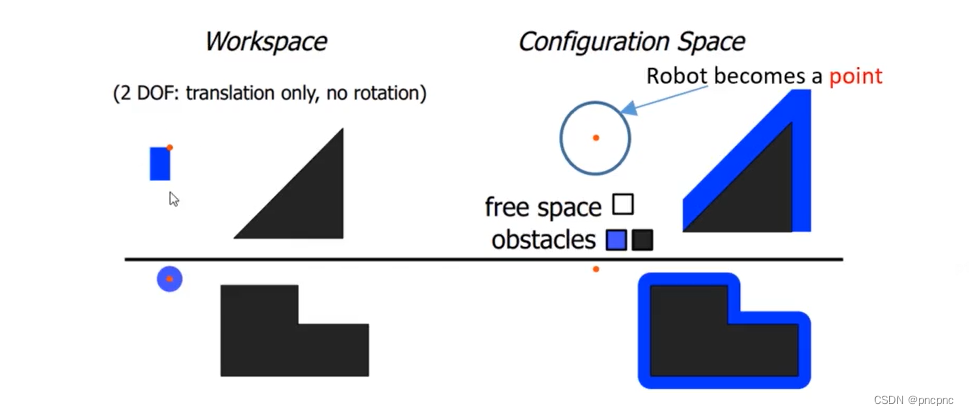
(1)配置:对机器人上所有点的位置的描述
(2)自由度:规划时,用最少的坐标数量表示机器人所存在的配置,移动机器人为x、y、psi
(3)配置空间:n个自由度所能表达的所有配置(位置)
2.将工作空间planning转到配置工作plannning流程
(1)将有形状的机器人(在工作空间内)看作一个质点(在配置空间内)
(2)将复杂的障碍物进行碰撞
规划流程转化为从start point到goal point的规划
二、图
1.定义
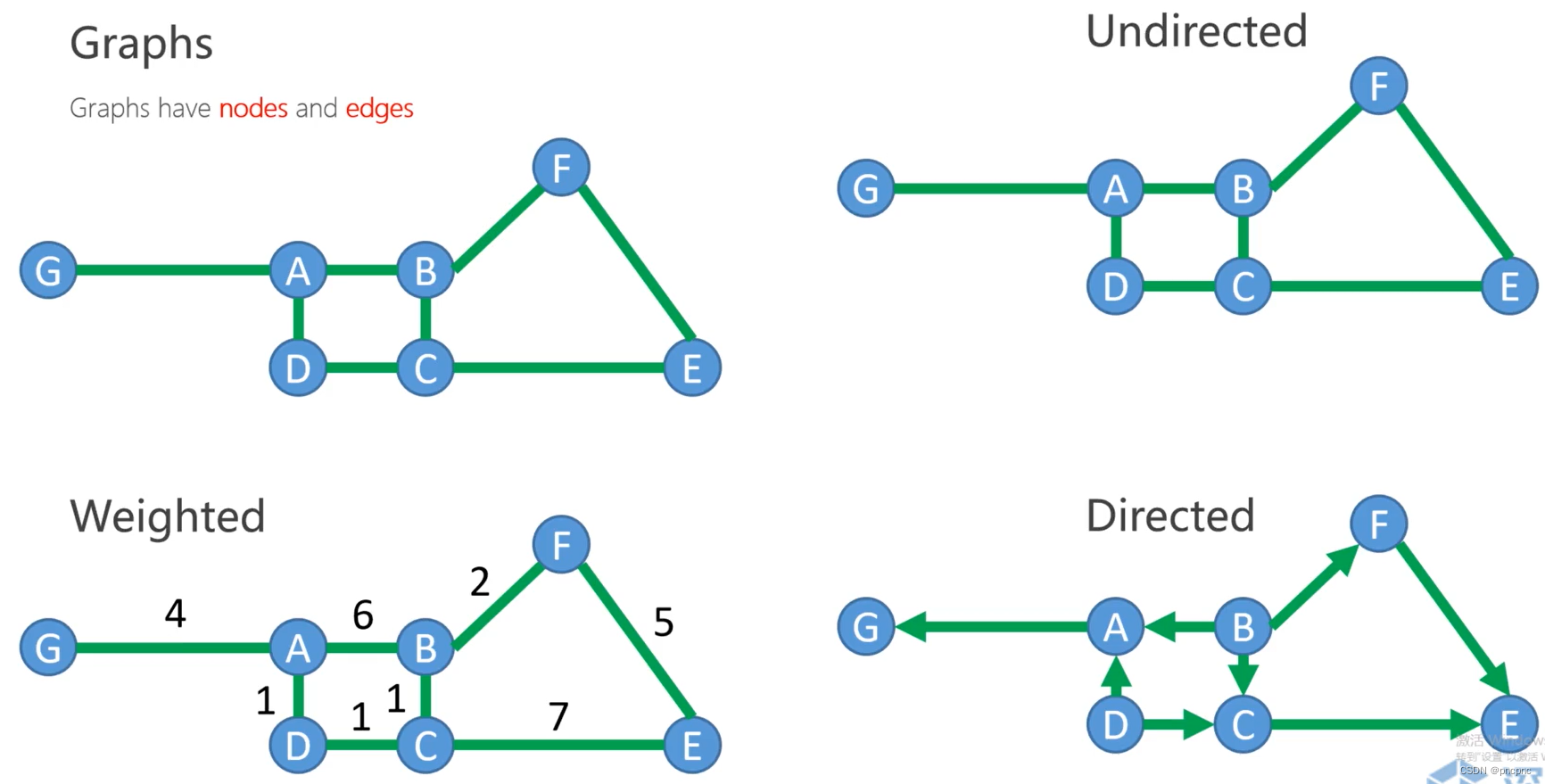
图包括节点与边,边分为有方向、无方向、有权重边
2.通过图建立搜索树,通过回溯搜索树(back-tracing)得到path,不可能遍历整个树,所以需要快速且最优的方法
三、图搜索算法总览
1.流程
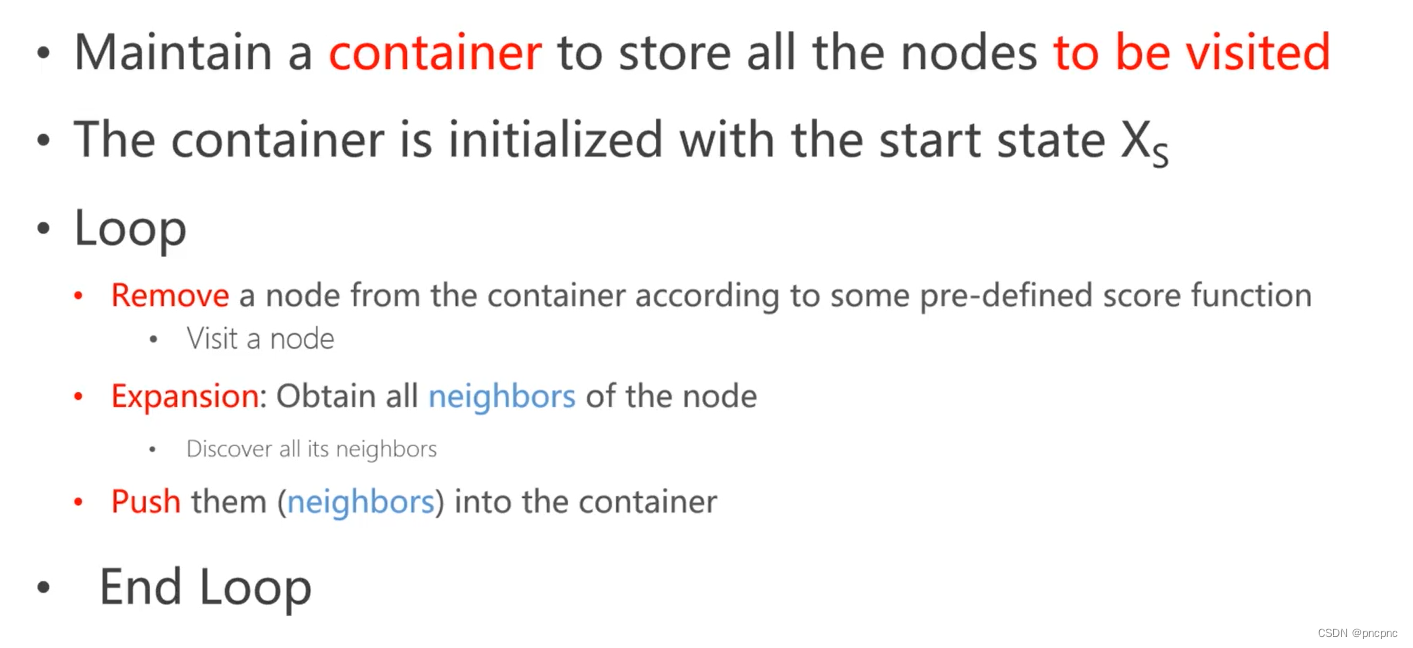
维护一个容器,里边存放所有将来打算访问的节点;
此容器初始只放一个初始节点;
进入循环:循环分为三步
1.容器中弹出一个节点
2.拓展此节点
3.将拓展的新节点塞回容器
结束循环:持续到容器内再无任何节点被弹出/访问到终止节点
2.注意事项
(1)什么时候结束循环
容器为空或到达目标
(2)如何避免回环(cyclic)
避免图永远走不出去,维护一个新容器(close list),装载已经被访问过的节点,不会被再次访问
(3)如何设计弹出规则,使得快且优的搜索?
四、搜索算法对比
1.定义
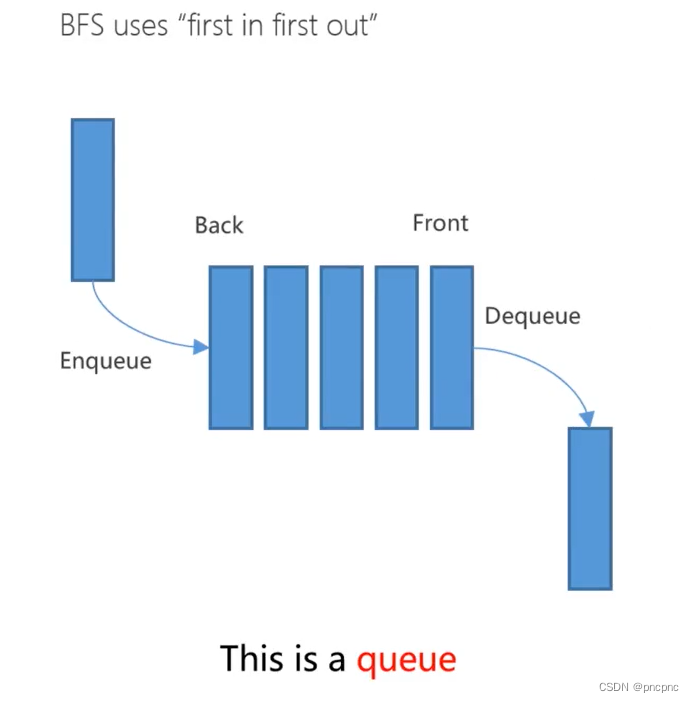
(1)BFS(Breadth First Search)广度优先算法
BFS维护一个队列(queue),use first in first out
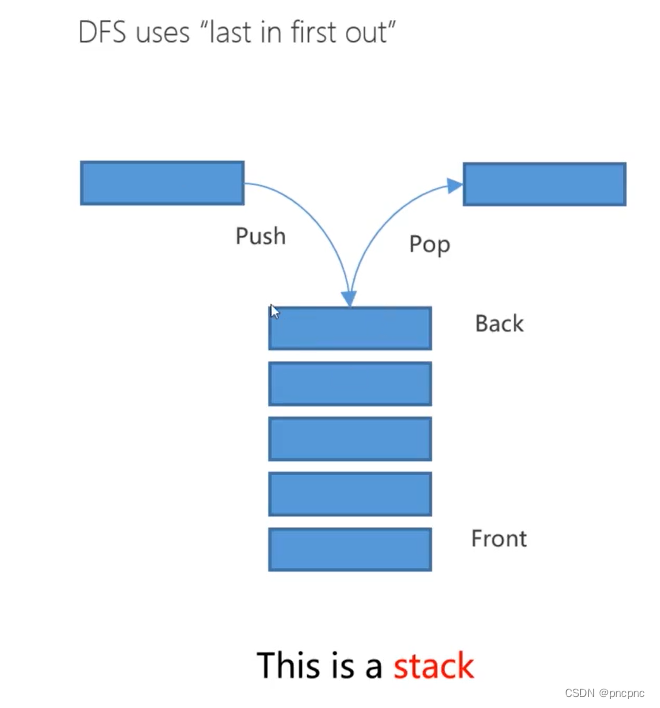
(2)DFS(Depth First Search) 深度优先算法
DFS维护一个栈(stack),use last in first out
2.深度优先算法(DFS):弹出有深层级的节点,表现为每次拓展时将可能的分支找到底
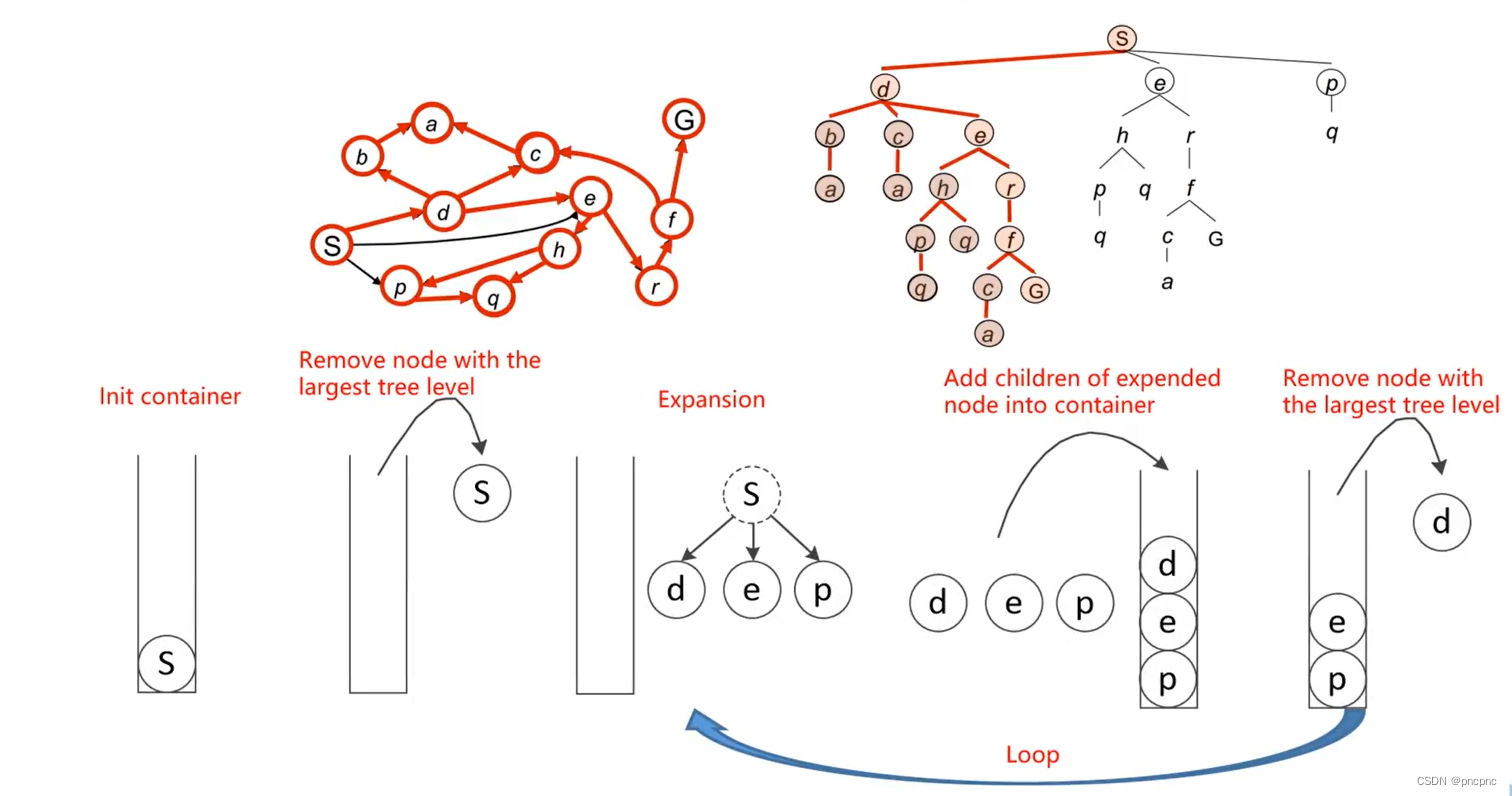
首先初始化一个容器,放入初始节点s,弹出s,拓展s,得到d、e、p,同一层级可以自己定义弹出规则,定义从左到右弹出则弹出d,d拓展bce,容器中目前存在bcep,弹出深层次的b,b拓展a,容器
中存在acep,弹出a结束,继续弹出c........直到到达目标G或者容器中为空
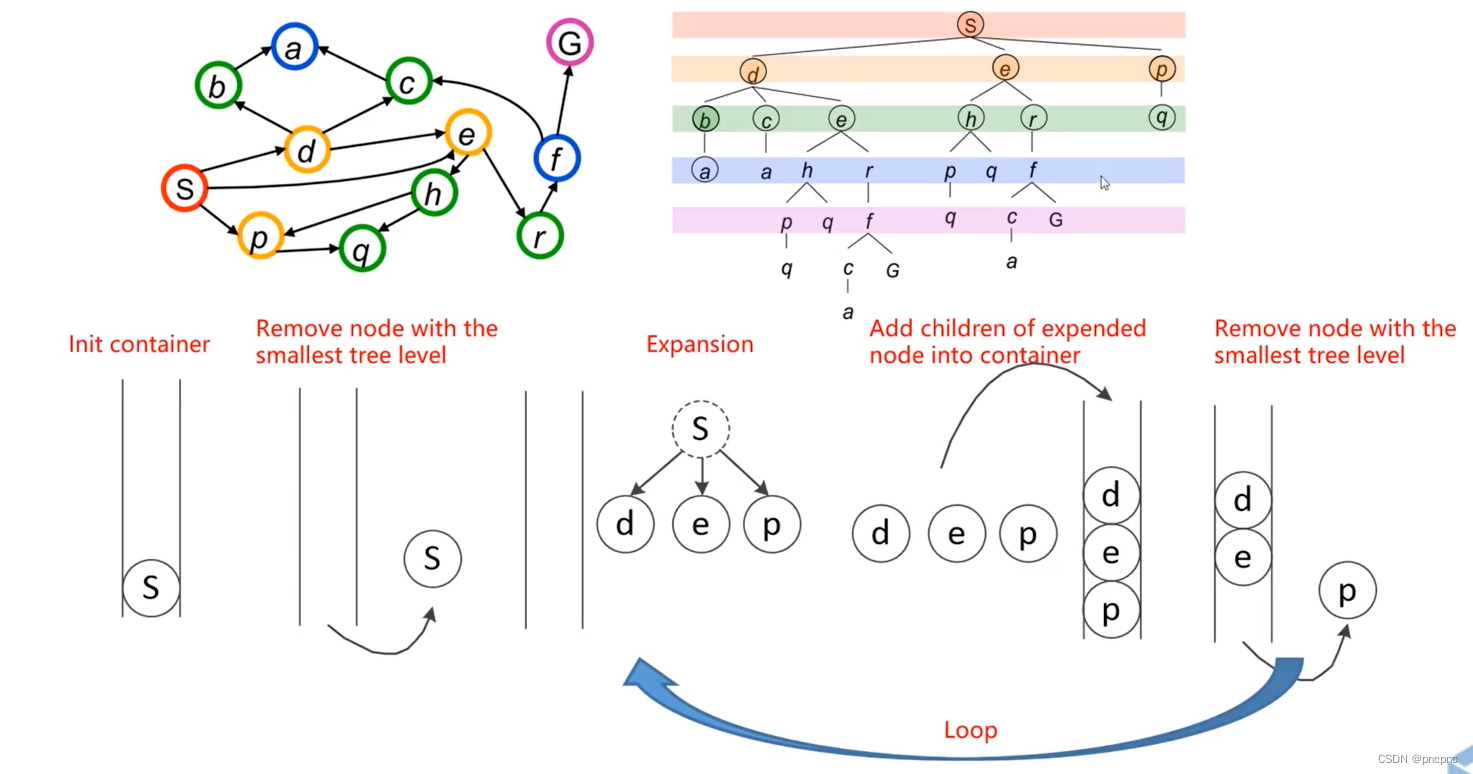
3.广度优先算法(BFS):从容器中弹出最浅一层的节点,表现为搜索过程为一层一层进行
4.BFS与DFS对比
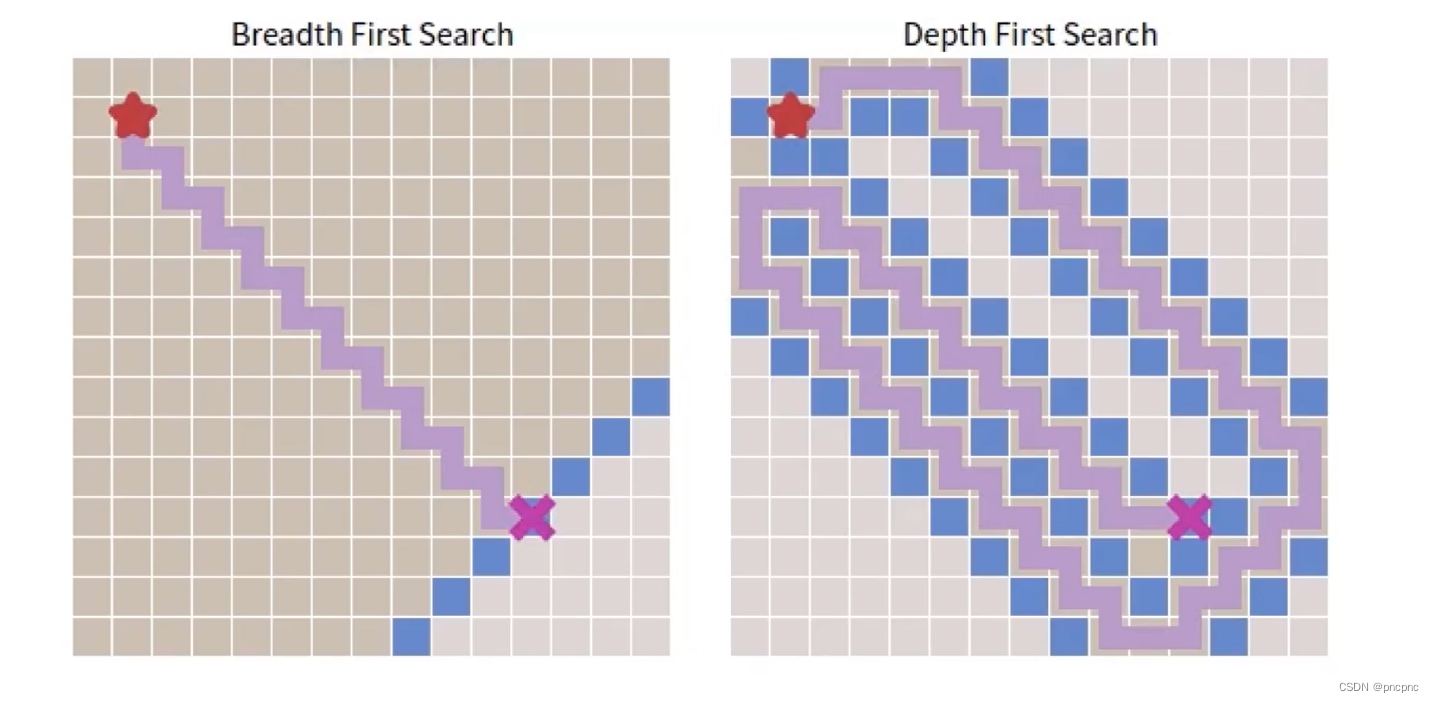
BFS路径短,规划最优,是图搜索的基础
五、启发式搜索(Heuristic search)也称贪心算法
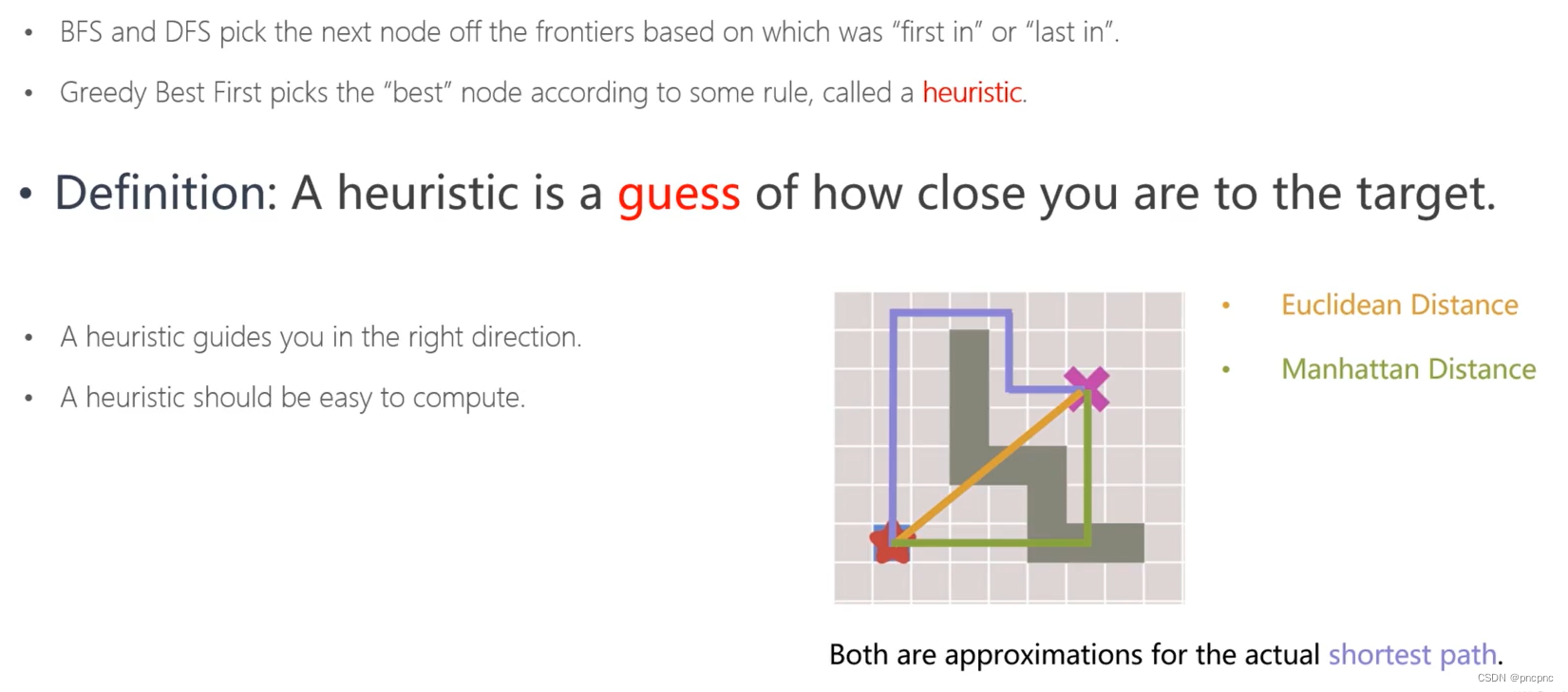
1.定义
首先,BFS/DFS根据节点的深浅层级弹出节点
贪心算法根据一些规则(heuristic)弹出节点,这个规则可以是与终点的欧氏距离,优点是可以指引正确的拓展方向,容易计算
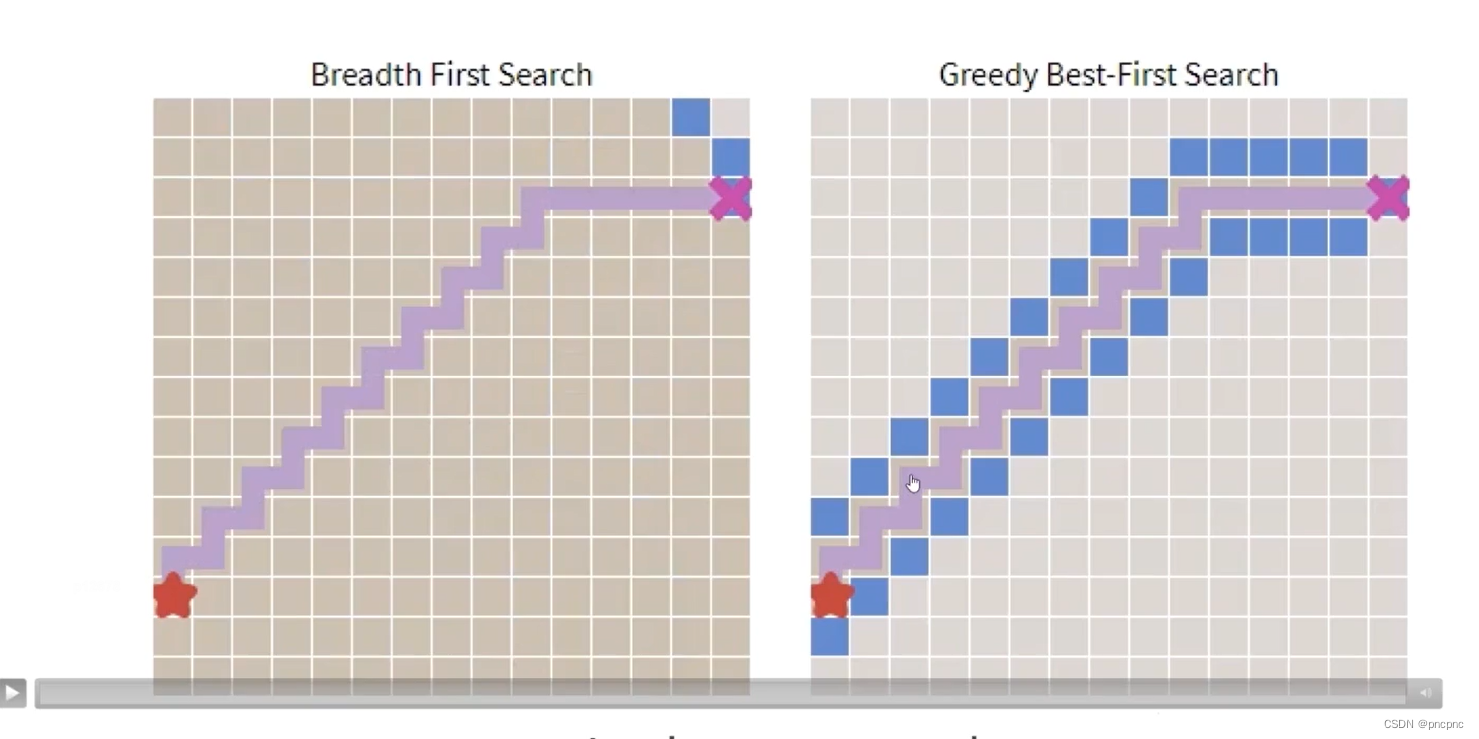
2.对比BFS与贪心算法
贪心算法有强烈的目的性,对接下来要拓展的节点用函数去估计到终点的远近,优先拓展近的
BFS则层层递进
3.缺陷总结
(1)贪心算法缺陷:局部最优
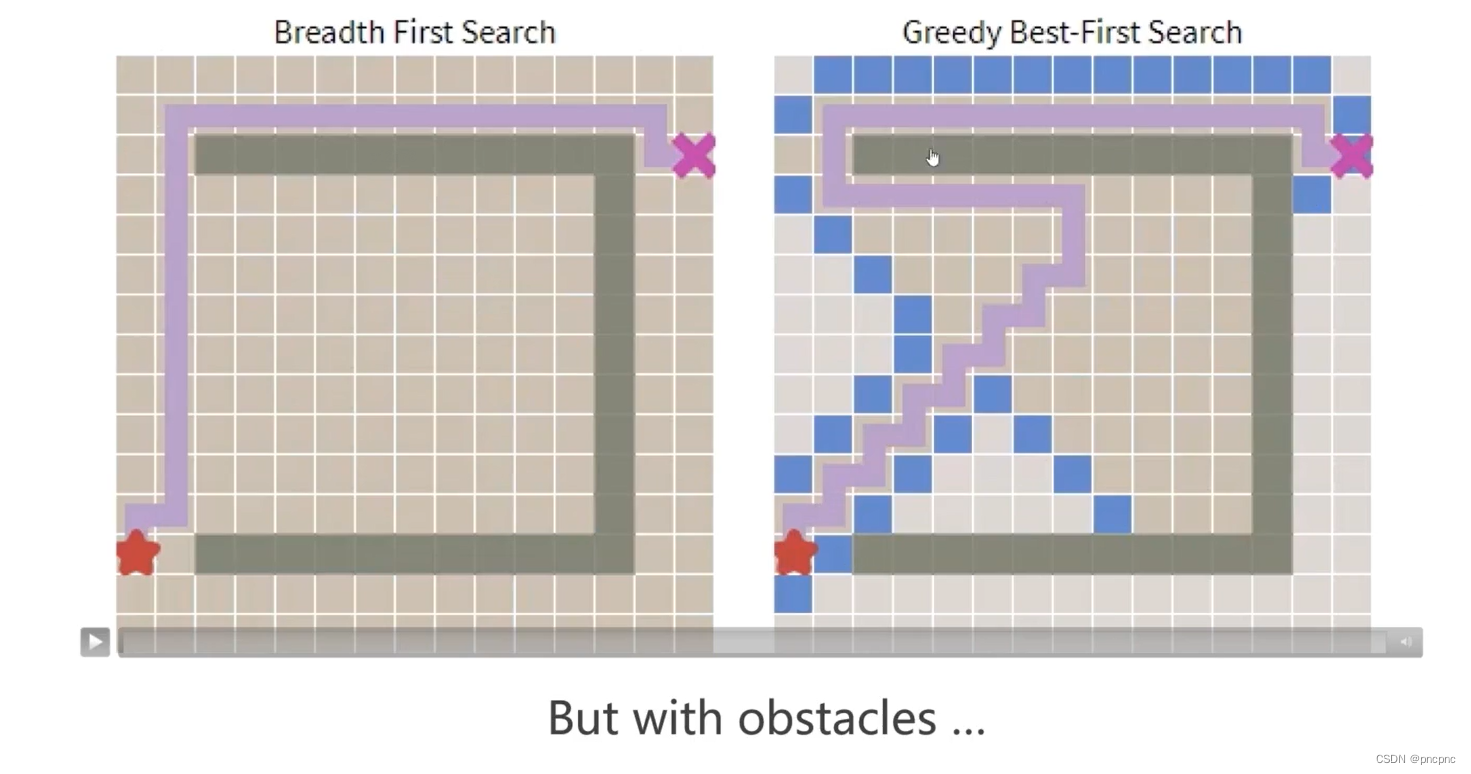
因为贪心算法的规则是在忽略障碍物的情况下进行的,容易陷入局部最优
(2)BFS成功的前提为:图中的边权重均匀
六、总结
搜索算法核心流程(弹出节点、拓展节点、将新节点压入队列或栈)、DFS与BFS、根据BFS改进的贪心算法















 3699
3699

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









