







 本文详细描述了一位作者制作平衡车的过程,包括基本功能如平衡控制和扩展功能的实现,硬件选型(如电源、传感器、模块和主控),以及原理图设计和PCB布局要点。特别介绍了DC-DC电源插头和自锁开关的工作原理。
本文详细描述了一位作者制作平衡车的过程,包括基本功能如平衡控制和扩展功能的实现,硬件选型(如电源、传感器、模块和主控),以及原理图设计和PCB布局要点。特别介绍了DC-DC电源插头和自锁开关的工作原理。
在本文开始之前我忍不住想吐槽一个事情,就在前两天晚上,我满意地装完平衡车,给他取了个名字叫瓦力(没错,就是机器人总动员里的瓦力),他长这个样子。
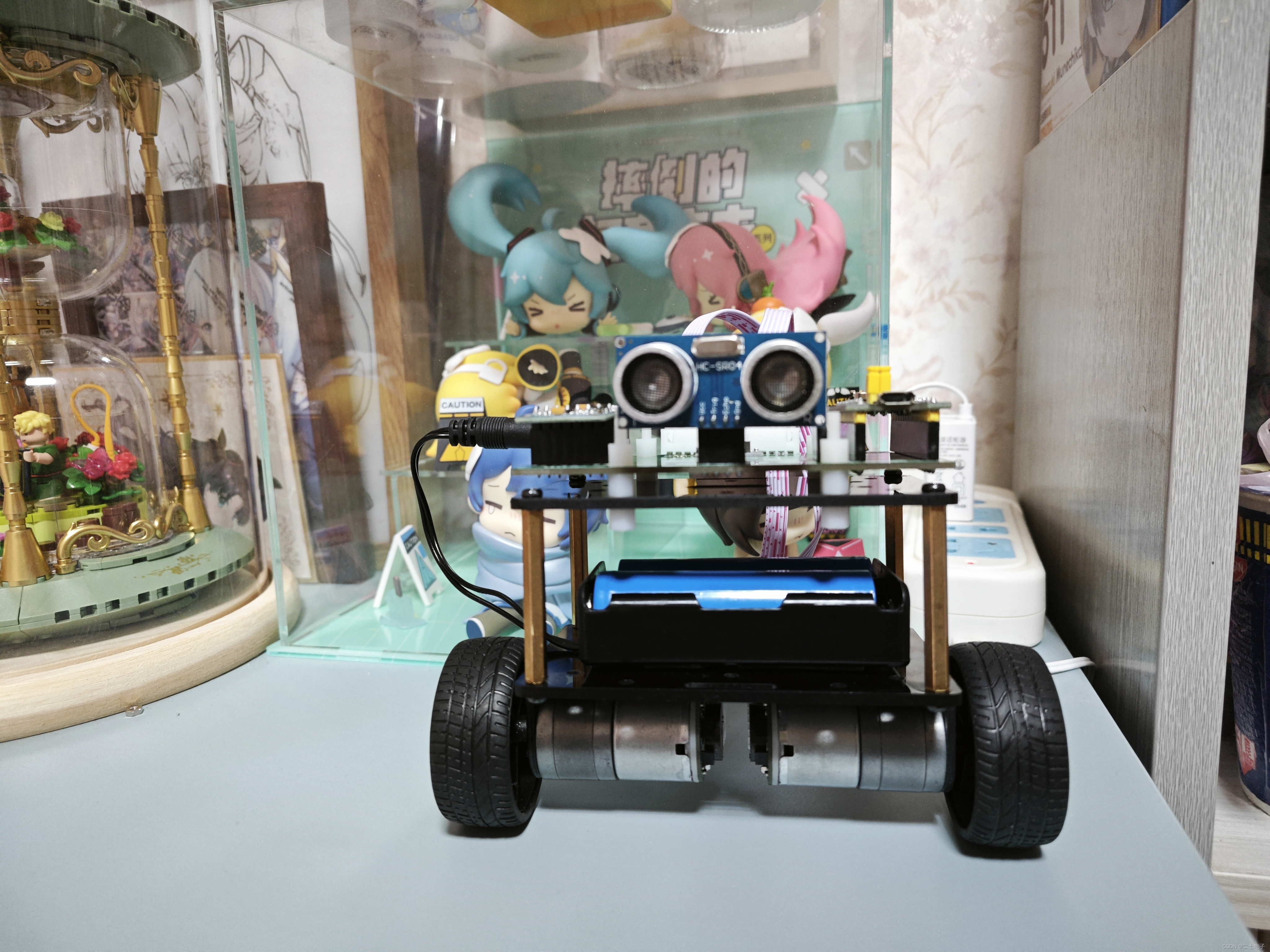
把他放到桌子上放了一夜,第二天早上起来拿起来看了一眼,准备一会儿把他放到手提袋里带走调试,甚至晚上还给他发了条说说说马上就要站起来了,结果就在我走出卧室门上厕所的那一小段时间里,瓦力!没错,就是他!竟然从桌子上掉下来了!亚克力板的四边全部摔断,甚至连主控引脚都摔歪了,没人知道他是怎么从桌子上掉下来的,没人知道,哎~总结一下,下次一定把自己的平衡车放到一个安全的位置叭,防止类似的惨案再次发生。
一、基本功能
作为一辆合格的平衡车,核心功能肯定是能做到平衡,也就是能够保持不栽跟头,即使有外力影响也能及时调整姿势。
除了基本的平衡功能外,还为平衡车提供了一些可扩展的功能
- OLED模块,用来显示调试信息、故障信息和运行信息;
- 蓝牙模块,用来实现蓝牙遥控;
- 超声波测距模块,用来实现超声波避障功能;
除了上述内容,本设计利用霍尔编码器来检测转速,实现速度的闭环控制,使得整个控制系统更加稳定。
二、硬件选型
讨论完基本功能,下面我们来讨论一下硬件选型,其中包括电源部分(电源、降压模块、电源开关)、模块部分(角度传感器、蓝牙模块、显示模块、超声波模块)、主控部分和整体车身以及电机和电机驱动模块。
| 模块 | 选型 |
|---|---|
| 电源 | 选择带有圆形插头的两节18650电池加电池盒 |
| 电源开关 | 选择自锁开关 |
| 降压模块 | 5V降压模块 |
| 角度传感器 | MPU6050 |
| 蓝牙模块 | HC-05 |
| 显示模块 | 四针OLED |
| 超声波模块 | HC-SR04 |
| 主控 | STM32F103C8T6 |
| 车身及电机 | 车身及电机选择购买成套的,电机7.4V供电 |
| 驱动模块 | TB6612 |
除了上述一些模块外,还需要准备排母、电源插头等物品,这里就不再一一列举了。
三、原理图设计
原理图设计需要考虑的关键点在于引脚的分配,这里列举一下引脚分配
| 引脚 | 功能 |
|---|---|
| PA6 | SCL(OLED) |
| PA7 | SDA(OLED) |
| PB6 | SCL(MPU6050) |
| PB7 | SDA(MPU6050) |
| PB0 | 电机M1霍尔编码器A相 |
| PB1 | 电机M2霍尔编码器A相 |
| PA9 | TX(HC-05) |
| PA10 | RX(HC-05) |
| PA0 | PWMA(TB6612) |
| PA1 | PWMB(TB6612) |
| PA2 | AIN1(TB6612) |
| PA3 | AIN2(TB6612) |
| PA4 | BIN1(TB6612) |
| PA5 | BIN2(TB6612) |
| PB8 | Trig(HC-SR04) |
| PB9 | Echo(HC-SR04) |
除了上述描述的,TB6612的AO引脚控制电机M1,BO控制电机M2,原理图如下图所示。

绘制原理图时除了引脚分配外,(针对我这个小白来说)比较容易出错的是电源插头和自锁开关部分的原理图设计,下面会有一章节着重介绍。
四、PCB设计
设计完了原理图,接下来就是设计PCB,设计PCB主要就是布局和布线,博主属于是硬件小白,大概总结一下重点内容
- 电源和地线尽量加宽,可使用15mil宽的线,其他的线可以选择10mil;
- 注意布局,防止出现模块互相贴的太近导致无法插入的情况;
- 注意开固定孔时的孔径,经过测试,M3的尼龙柱或者铜柱开孔时孔直径设置为3.2mm比较合适;
- 注意固定孔间距,防止固定孔间距与平衡车底板不符导致无法固定;
- 尽量将每一个模块的引脚都加上丝印标注,方便后续实物调试时插接模块;
- 注意不要忘记铺铜;
除了上述介绍的内容外就是一些老生常谈的问题,比如走线尽量不要走直角和锐角这种,这里就不再详细介绍了,觉得自己手动布线比较麻烦的可以选择直接自动布线,博主这里就选择的自动布线。
由于博主属于是硬件小白,如果有大佬觉得任何地方描述存在问题,欢迎批评指正。
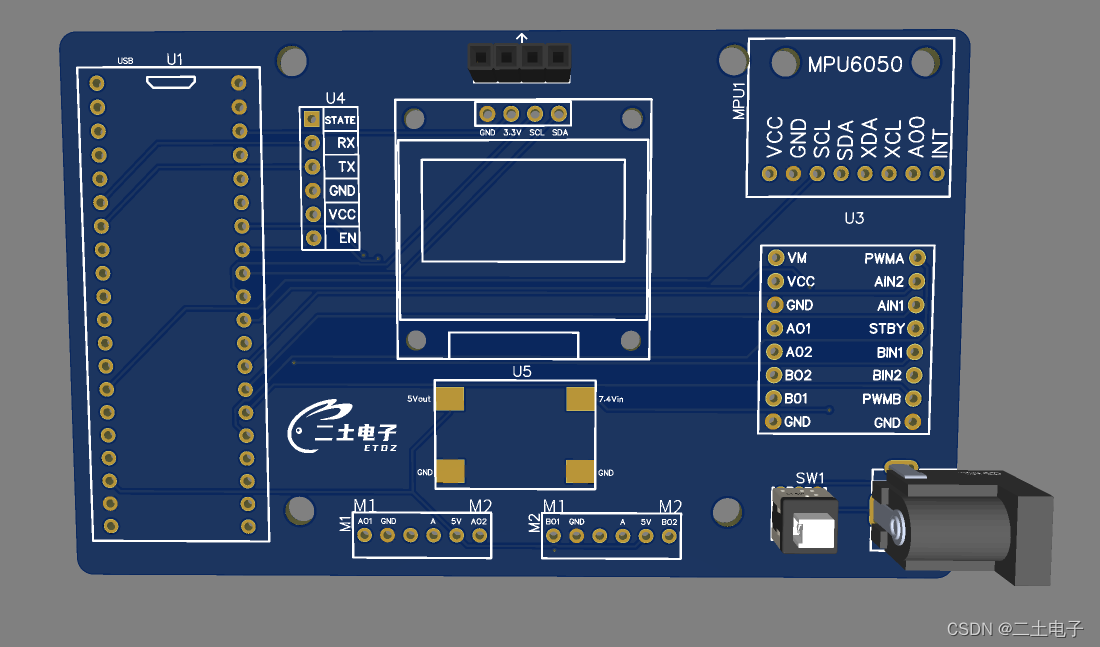
最终的3D视图如下
五、器件详细介绍
由于博主在绘制原理图时有两个小器件的电路绘制错误,所以这里着重介绍一下,介绍时请忽略博主潦草的画风,大佬可以直接划走。
5.1 DC-DC电源插头
首先看一下它的物理外观对应的引脚作用
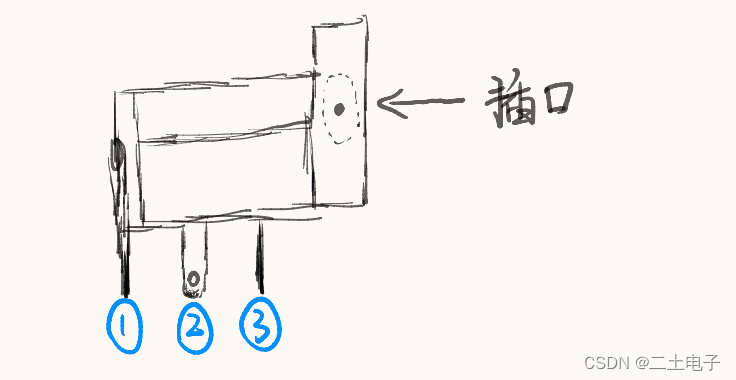
| 引脚编号 | 引脚功能 |
|---|---|
| 1 | 电源正极 |
| 2 | 电源负极静触点 |
| 3 | 电源负极动触点 |
未插入时,2和3连通,插入时三个引脚均为接通,1为电源正极,3为电源负极。
然后我们再看看它的原理图,引脚功能顺序与物理外观相同

5.2 自锁开关
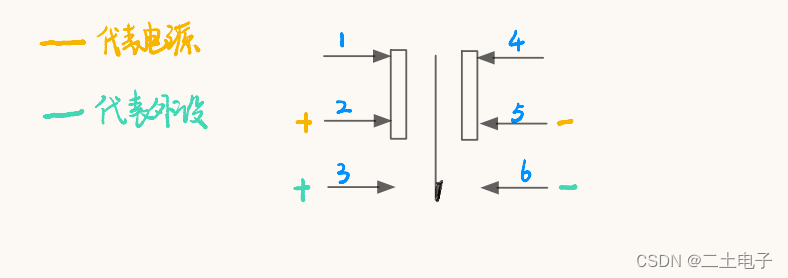
还是先来看一下他的物理外观
正面的小标记有可能是博主买的自锁开关独有的,别的不太清楚。
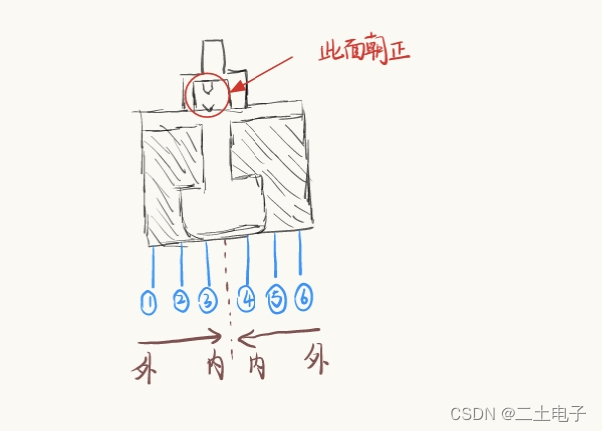
对应物理外观,我们来看一下它的引脚。
- 常开状态下1、2连通,4、5连通;
- 常闭状态下2、3连通,5、6连通;
下面我们来看一下原理图画法(引脚连通规律与物理外观对应)
六、制板文件获取
最后给大家奉上平衡车转接板的制板文件,祝大家一切顺利!
链接:https://pan.baidu.com/s/1ATYMkfE8rbZlQawqcESlmA
提取码:bpl6
–来自百度网盘超级会员V4的分享
2024.06.19补充:本文设计的PCB有一些未考虑到的点,所以后续更改为了(上),接着会有一篇(下)会针对一些点进行优化调整,也会给出优化的理由。



















 515
515

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











