






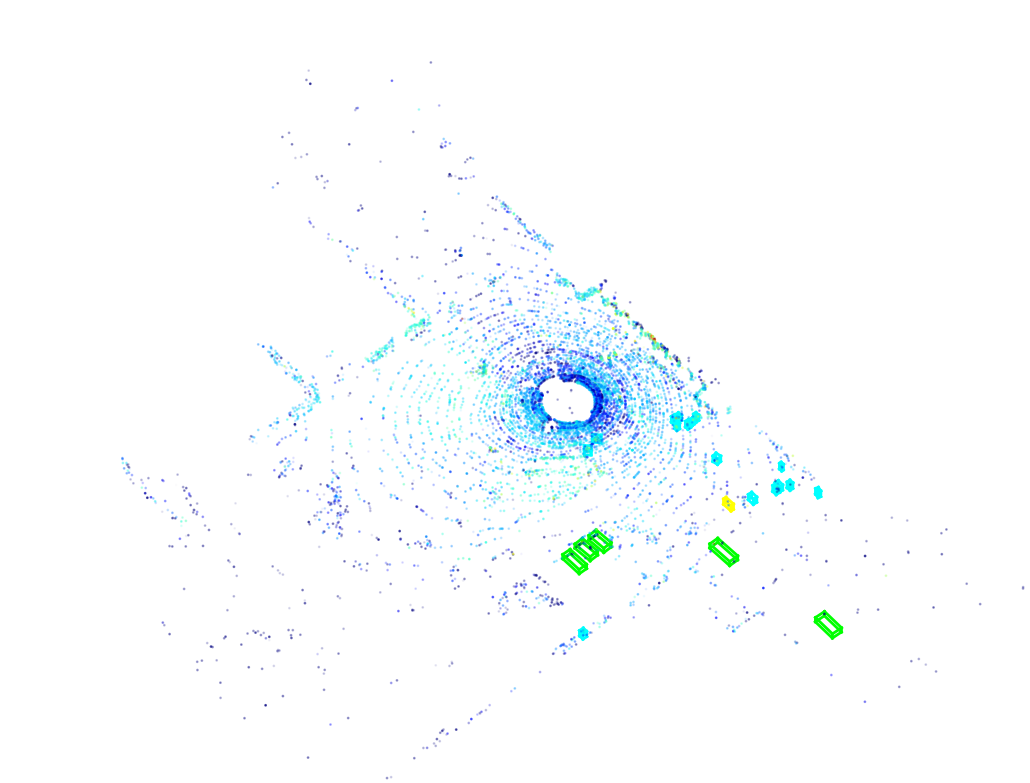
配置kitti_object_vis没成功,用kitti_object_vis的一些函数加上matplotlib进行可视化
import numpy as np
import matplotlib.pyplot as plt
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
def roty(t):
""" Rotation about the y-axis. """
c = np.cos(t)
s = np.sin(t)
return np.array([[c, 0, s], [0, 1, 0], [-s, 0, c]])
def compute_box_3d(obj):
""" Takes an object and a projection matrix (P) and projects the 3d
bounding box into the image plane.
Returns:
corners_3d: (8,3) array in in rect camera coord.
"""
# compute rotational matrix around yaw axis
R = roty(obj.ry)
# 3d bounding box dimensions
l = obj.l
w = obj.w
h = obj.h
# 3d bounding box corners
x_corners = [l / 2, l / 2, -l / 2, -l / 2, l / 2, l / 2, -l / 2, -l / 2]
y_corners = [0, 0, 0, 0, -h, -h, -h, -h]
z_corners = [w / 2, -w / 2, -w / 2, w / 2, w / 2, -w / 2, -w / 2, w / 2]
corners_3d = np.dot(R, np.vstack([x_corners, y_corners, z_corners]))
# print corners_3d.shape
corners_3d[0, :] = corners_3d[0, :] + obj.t[0]
corners_3d[1, :] = corners_3d[1, :] + obj.t[1]
corners_3d[2, :] = corners_3d[2, :] + obj.t[2]
return np.transpose(corners_3d)
def read_label(label_filename):
lines = [line.rstrip() for line in open(label_filename)]
objects = [Object3d(line) for line in lines if line[:8]!="DontCare"]
return objects
def choice_points(points,k=int(1e4)):
selected_indices = np.random.choice(len(points), k, replace=False)
return points[selected_indices]
def inverse_rigid_trans(Tr):
""" Inverse a rigid body transform matrix (3x4 as [R|t])
[R'|-R't; 0|1]
"""
inv_Tr = np.zeros_like(Tr) # 3x4
inv_Tr[0:3, 0:3] = np.transpose(Tr[0:3, 0:3])
inv_Tr[0:3, 3] = np.dot(-np.transpose(Tr[0:3, 0:3]), Tr[0:3, 3])
return inv_Tr
class Calibration(object):
""" Calibration matrices and utils
3d XYZ in <label>.txt are in rect camera coord.
2d box xy are in image2 coord
Points in <lidar>.bin are in Velodyne coord.
y_image2 = P^2_rect * x_rect
y_image2 = P^2_rect * R0_rect * Tr_velo_to_cam * x_velo
x_ref = Tr_velo_to_cam * x_velo
x_rect = R0_rect * x_ref
P^2_rect = [f^2_u, 0, c^2_u, -f^2_u b^2_x;
0, f^2_v, c^2_v, -f^2_v b^2_y;
0, 0, 1, 0]
= K * [1|t]
image2 coord:
----> x-axis (u)
|
|
v y-axis (v)
velodyne coord:
front x, left y, up z
rect/ref camera coord:
right x, down y, front z
Ref (KITTI paper): http://www.cvlibs.net/publications/Geiger2013IJRR.pdf
TODO(rqi): do matrix multiplication only once for each projection.
"""
def __init__(self, calib_filepath, from_video=False):
if from_video:
calibs = self.read_calib_from_video(calib_filepath)
else:
calibs = self.read_calib_file(calib_filepath)
# Projection matrix from rect camera coord to image2 coord
self.P = calibs["P2"]
self.P = np.reshape(self.P, [3, 4])
# Rigid transform from Velodyne coord to reference camera coord
self.V2C = calibs["Tr_velo_to_cam"]
self.V2C = np.reshape(self.V2C, [3, 4])
self.C2V = inverse_rigid_trans(self.V2C)
# Rotation from reference camera coord to rect camera coord
self.R0 = calibs["R0_rect"]
self.R0 = np.reshape(self.R0, [3, 3])
# Camera intrinsics and extrinsics
self.c_u = self.P[0, 2]
self.c_v = self.P[1, 2]
self.f_u = self.P[0, 0]
self.f_v = self.P[1, 1]
self.b_x = self.P[0, 3] / (-self.f_u) # relative
self.b_y = self.P[1, 3] / (-self.f_v)
def read_calib_file(self, filepath):
""" Read in a calibration file and parse into a dictionary.
Ref: https://github.com/utiasSTARS/pykitti/blob/master/pykitti/utils.py
"""
data = {}
with open(filepath, "r") as f:
for line in f.readlines():
line = line.rstrip()
if len(line) == 0:
continue
key, value = line.split(":", 1)
# The only non-float values in these files are dates, which
# we don't care about anyway
try:
data[key] = np.array([float(x) for x in value.split()])
except ValueError:
pass
return data
def read_calib_from_video(self, calib_root_dir):
""" Read calibration for camera 2 from video calib files.
there are calib_cam_to_cam and calib_velo_to_cam under the calib_root_dir
"""
data = {}
cam2cam = self.read_calib_file(
os.path.join(calib_root_dir, "calib_cam_to_cam.txt")
)
velo2cam = self.read_calib_file(
os.path.join(calib_root_dir, "calib_velo_to_cam.txt")
)
Tr_velo_to_cam = np.zeros((3, 4))
Tr_velo_to_cam[0:3, 0:3] = np.reshape(velo2cam["R"], [3, 3])
Tr_velo_to_cam[:, 3] = velo2cam["T"]
data["Tr_velo_to_cam"] = np.reshape(Tr_velo_to_cam, [12])
data["R0_rect"] = cam2cam["R_rect_00"]
data["P2"] = cam2cam["P_rect_02"]
return data
def cart2hom(self, pts_3d):
""" Input: nx3 points in Cartesian
Oupput: nx4 points in Homogeneous by pending 1
"""
n = pts_3d.shape[0]
pts_3d_hom = np.hstack((pts_3d, np.ones((n, 1))))
return pts_3d_hom
# ===========================
# ------- 3d to 3d ----------
# ===========================
def project_velo_to_ref(self, pts_3d_velo):
pts_3d_velo = self.cart2hom(pts_3d_velo) # nx4
return np.dot(pts_3d_velo, np.transpose(self.V2C))
def project_ref_to_velo(self, pts_3d_ref):
pts_3d_ref = self.cart2hom(pts_3d_ref) # nx4
return np.dot(pts_3d_ref, np.transpose(self.C2V))
def project_rect_to_ref(self, pts_3d_rect):
""" Input and Output are nx3 points """
return np.transpose(np.dot(np.linalg.inv(self.R0), np.transpose(pts_3d_rect)))
def project_ref_to_rect(self, pts_3d_ref):
""" Input and Output are nx3 points """
return np.transpose(np.dot(self.R0, np.transpose(pts_3d_ref)))
def project_rect_to_velo(self, pts_3d_rect):
""" Input: nx3 points in rect camera coord.
Output: nx3 points in velodyne coord.
"""
pts_3d_ref = self.project_rect_to_ref(pts_3d_rect)
return self.project_ref_to_velo(pts_3d_ref)
def project_velo_to_rect(self, pts_3d_velo):
pts_3d_ref = self.project_velo_to_ref(pts_3d_velo)
return self.project_ref_to_rect(pts_3d_ref)
# ===========================
# ------- 3d to 2d ----------
# ===========================
def project_rect_to_image(self, pts_3d_rect):
""" Input: nx3 points in rect camera coord.
Output: nx2 points in image2 coord.
"""
pts_3d_rect = self.cart2hom(pts_3d_rect)
pts_2d = np.dot(pts_3d_rect, np.transpose(self.P)) # nx3
pts_2d[:, 0] /= pts_2d[:, 2]
pts_2d[:, 1] /= pts_2d[:, 2]
return pts_2d[:, 0:2]
def project_velo_to_image(self, pts_3d_velo):
""" Input: nx3 points in velodyne coord.
Output: nx2 points in image2 coord.
"""
pts_3d_rect = self.project_velo_to_rect(pts_3d_velo)
return self.project_rect_to_image(pts_3d_rect)
def project_8p_to_4p(self, pts_2d):
x0 = np.min(pts_2d[:, 0])
x1 = np.max(pts_2d[:, 0])
y0 = np.min(pts_2d[:, 1])
y1 = np.max(pts_2d[:, 1])
x0 = max(0, x0)
# x1 = min(x1, proj.image_width)
y0 = max(0, y0)
# y1 = min(y1, proj.image_height)
return np.array([x0, y0, x1, y1])
def project_velo_to_4p(self, pts_3d_velo):
""" Input: nx3 points in velodyne coord.
Output: 4 points in image2 coord.
"""
pts_2d_velo = self.project_velo_to_image(pts_3d_velo)
return self.project_8p_to_4p(pts_2d_velo)
# ===========================
# ------- 2d to 3d ----------
# ===========================
def project_image_to_rect(self, uv_depth):
""" Input: nx3 first two channels are uv, 3rd channel
is depth in rect camera coord.
Output: nx3 points in rect camera coord.
"""
n = uv_depth.shape[0]
x = ((uv_depth[:, 0] - self.c_u) * uv_depth[:, 2]) / self.f_u + self.b_x
y = ((uv_depth[:, 1] - self.c_v) * uv_depth[:, 2]) / self.f_v + self.b_y
pts_3d_rect = np.zeros((n, 3))
pts_3d_rect[:, 0] = x
pts_3d_rect[:, 1] = y
pts_3d_rect[:, 2] = uv_depth[:, 2]
return pts_3d_rect
def project_image_to_velo(self, uv_depth):
pts_3d_rect = self.project_image_to_rect(uv_depth)
return self.project_rect_to_velo(pts_3d_rect)
def project_depth_to_velo(self, depth, constraint_box=True):
depth_pt3d = get_depth_pt3d(depth)
depth_UVDepth = np.zeros_like(depth_pt3d)
depth_UVDepth[:, 0] = depth_pt3d[:, 1]
depth_UVDepth[:, 1] = depth_pt3d[:, 0]
depth_UVDepth[:, 2] = depth_pt3d[:, 2]
# print("depth_pt3d:",depth_UVDepth.shape)
depth_pc_velo = self.project_image_to_velo(depth_UVDepth)
# print("dep_pc_velo:",depth_pc_velo.shape)
if constraint_box:
depth_box_fov_inds = (
(depth_pc_velo[:, 0] < cbox[0][1])
& (depth_pc_velo[:, 0] >= cbox[0][0])
& (depth_pc_velo[:, 1] < cbox[1][1])
& (depth_pc_velo[:, 1] >= cbox[1][0])
& (depth_pc_velo[:, 2] < cbox[2][1])
& (depth_pc_velo[:, 2] >= cbox[2][0])
)
depth_pc_velo = depth_pc_velo[depth_box_fov_inds]
return depth_pc_velo
class Object3d(object):
""" 3d object label """
def __init__(self, label_file_line):
data = label_file_line.split(" ")
data[1:] = [float(x) for x in data[1:]]
# extract label, truncation, occlusion
self.type = data[0] # 'Car', 'Pedestrian', ...
self.truncation = data[1] # truncated pixel ratio [0..1]
self.occlusion = int(
data[2]
) # 0=visible, 1=partly occluded, 2=fully occluded, 3=unknown
self.alpha = data[3] # object observation angle [-pi..pi]
# extract 2d bounding box in 0-based coordinates
self.xmin = data[4] # left
self.ymin = data[5] # top
self.xmax = data[6] # right
self.ymax = data[7] # bottom
self.box2d = np.array([self.xmin, self.ymin, self.xmax, self.ymax])
# extract 3d bounding box information
self.h = data[8] # box height
self.w = data[9] # box width
self.l = data[10] # box length (in meters)
self.t = (data[11], data[12], data[13]) # location (x,y,z) in camera coord.
self.ry = data[14] # yaw angle (around Y-axis in camera coordinates) [-pi..pi]
def estimate_diffculty(self):
""" Function that estimate difficulty to detect the object as defined in kitti website"""
# height of the bounding box
bb_height = np.abs(self.xmax - self.xmin)
if bb_height >= 40 and self.occlusion == 0 and self.truncation <= 0.15:
return "Easy"
elif bb_height >= 25 and self.occlusion in [0, 1] and self.truncation <= 0.30:
return "Moderate"
elif (
bb_height >= 25 and self.occlusion in [0, 1, 2] and self.truncation <= 0.50
):
return "Hard"
else:
return "Unknown"
def print_object(self):
print(
"Type, truncation, occlusion, alpha: %s, %d, %d, %f"
% (self.type, self.truncation, self.occlusion, self.alpha)
)
print(
"2d bbox (x0,y0,x1,y1): %f, %f, %f, %f"
% (self.xmin, self.ymin, self.xmax, self.ymax)
)
print("3d bbox h,w,l: %f, %f, %f" % (self.h, self.w, self.l))
print(
"3d bbox location, ry: (%f, %f, %f), %f"
% (self.t[0], self.t[1], self.t[2], self.ry)
)
print("Difficulty of estimation: {}".format(self.estimate_diffculty()))
def load_velo_scan(velo_filename, dtype=np.float32, n_vec=4):
scan = np.fromfile(velo_filename, dtype=dtype)
scan = scan.reshape((-1, n_vec))
return scan
def draw_gt_boxes3d( gt_boxes3d, ax, color=(0, 1, 0), line_width=2, draw_text=True, text_scale=(1, 1, 1), color_list=None, label=""):
""" Draw 3D bounding boxes
Args:
gt_boxes3d: numpy array (n,8,3) for XYZs of the box corners
ax: matplotlib axes handler
color: RGB value tuple in range (0,1), box line color
line_width: box line width
draw_text: boolean, if true, write box indices beside boxes
text_scale: three number tuple
color_list: a list of RGB tuple, if not None, overwrite color.
label: label to display beside the boxes
Returns:
ax: updated axes
"""
num = len(gt_boxes3d)
# print(gt_boxes3d)
for n in range(num):
b = gt_boxes3d[n]
# b[:, [0,1, 2]] = b[:, [2,0, 1]]
# b[:, [0,1, 2]] = b[:, [0,2,1]]
## b[:, [0,1, 2]] = b[:, [1,0,2]]
## b[:, [0,1, 2]] = b[:, [1,2,0]]
##b[:, [0,1, 2]] = b[:, [2,1,0]]
if color_list is not None:
color = color_list[n]
if draw_text:
ax.text(
b[4, 0],
b[4, 1],
b[4, 2],
label,
color=color,
fontsize=10,
ha='center',
va='center',
)
for k in range(0, 4):
i, j = k, (k + 1) % 4
ax.plot(
[b[i, 0], b[j, 0]],
[b[i, 1], b[j, 1]],
[b[i, 2], b[j, 2]],
color=color,
linewidth=line_width,
)
i, j = k + 4, (k + 1) % 4 + 4
ax.plot(
[b[i, 0], b[j, 0]],
[b[i, 1], b[j, 1]],
[b[i, 2], b[j, 2]],
color=color,
linewidth=line_width,
)
i, j = k, k + 4
ax.plot(
[b[i, 0], b[j, 0]],
[b[i, 1], b[j, 1]],
[b[i, 2], b[j, 2]],
color=color,
linewidth=line_width,
)
return ax
color_dt={"Car":(0,1,0),"Pedestrian":(0,1,1),"Cyclist":(1,1,0)}
def MyDraw():
points=load_velo_scan(lidar_path)
objs=read_label(label_path)
box_corners = [compute_box_3d(obj) for obj in objs]
calib = Calibration(calib_path)
box_corners =[ calib.project_rect_to_velo(box_corner) for box_corner in box_corners]
if reduce_points:
points=choice_points(points)
xyz = points[:, :3]
color = points[:, 3]
min_xyz = np.min(xyz, axis=0)
max_xyz = np.max(xyz, axis=0)
print(max_xyz)
fig = plt.figure(figsize=(15, 15))
ax = fig.add_subplot(111, projection='3d')
ax.scatter(xyz[:, 0], xyz[:, 1], xyz[:, 2], c=color, cmap='jet', s=1,alpha=points[:, 3])
ax.set_xlabel('X')
ax.set_ylabel('Y')
ax.set_zlabel('Z')
# 设置坐标轴范围
# ax.set_xlim(min_xyz[0], max_xyz[0])
# ax.set_ylim(min_xyz[1], max_xyz[1])
# ax.set_zlim(min_xyz[2], max_xyz[2])
ax.set_xlim(-70, 70)
ax.set_ylim(-70, 70)
ax.set_zlim(-70, 70)
ax=draw_gt_boxes3d(ax=ax,gt_boxes3d=box_corners,color_list=[color_dt[obj.type] for obj in objs])
plt.axis('off')
plt.grid(False)
plt.tight_layout()
plt.show()
# if save_name:
# plt.savefig(save_name)
num="004139"
lidar_path = "/mnt/kitti/training/velodyne/%s.bin"%(num)
label_path= "/mnt/kitti/training/label_2/%s.txt"%(num)
calib_path="/mnt/kitti/training/calib/%s.txt"%(num)
reduce_points=True
MyDraw()
















 607
607











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









