







残差网络Resnet50
网络结构
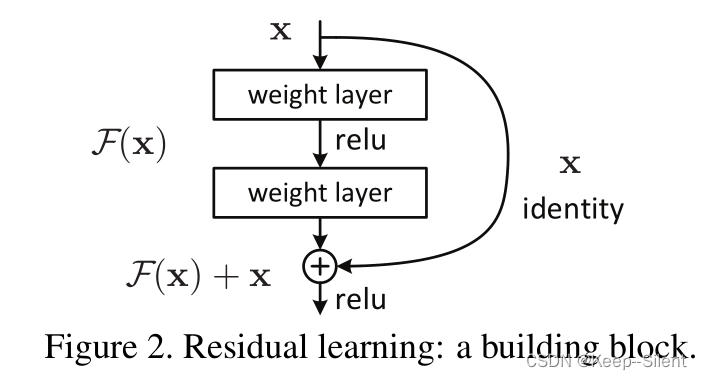
由于卷积层的堆叠,前面的信息可能在之后被丢失,造成精度下降。为了防止这种情况,将前面的层和后面的层进行叠加,防止信息丢失
Resnet网络结构:
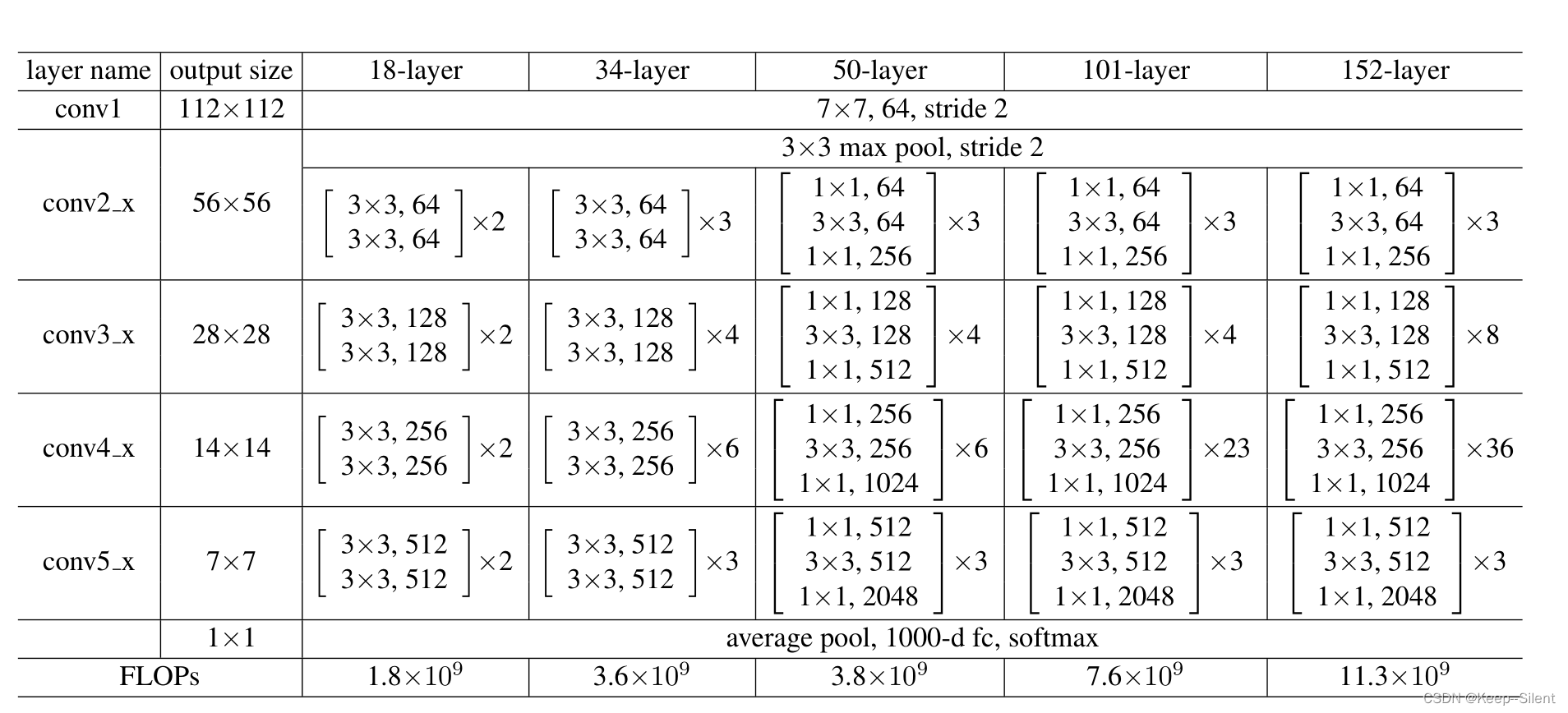
Resnet50网络结构:
| level | input | stride | output | ||
| 1 | 224*224*3 | 7*7*64 | 2 | 112*112*64 | |
| MaxPool | 112*112*64 | MaxPool | 2 | 56*56*64 | |
| 2 | 56*56*64 | 1*1*64 | 1 | 56*56*64 | 1 |
| 3 | 56*56*64 | 3*3*64 | 1 | 56*56*64 | |
| 4 | 56*56*64 | 1*1*256 | 1 | 56*56*256 | |
| 5 | 56*56*256 | 1*1*64 | 1 | 56*56*64 | 1 |
| 6 | 56*56*64 | 3*3*64 | 1 | 56*56*64 | |
| 7 | 56*56*64 | 1*1*256 | 1 | 56*56*256 | |
| 8 | 56*56*256 | 1*1*64 | 1 | 56*56*64 | 1 |
| 9 | 56*56*64 | 3*3*64 | 1 | 56*56*64 | |
| 10 | 56*56*64 | 1*1*256 | 1 | 56*56*256 | |
| 11 | 56*56*256 | 1*1*128 | 1 | 56*56*128 | 2 |
| 12 | 56*56*128 | 3*3*128 | 2 | 28*28*128 | |
| 13 | 28*28*128 | 1*1*512 | 1 | 28*28*512 | |
| 14 | 28*28*512 | 1*1*128 | 1 | 28*28*128 | 2 |
| 15 | 28*28*128 | 3*3*128 | 1 | 28*28*128 | |
| 16 | 28*28*128 | 1*1*512 | 1 | 28*28*512 | |
| 17 | 28*28*512 | 1*1*128 | 1 | 28*28*128 | 2 |
| 18 | 28*28*128 | 3*3*128 | 1 | 28*28*128 | |
| 19 | 28*28*128 | 1*1*512 | 1 | 28*28*512 | |
| 20 | 28*28*512 | 1*1*128 | 1 | 28*28*128 | 2 |
| 21 | 28*28*128 | 3*3*128 | 1 | 28*28*128 | |
| 22 | 28*28*128 | 1*1*512 | 1 | 28*28*512 | |
| 23 | 28*28*512 | 1*1*256 | 1 | 28*28*256 | 3 |
| 24 | 28*28*256 | 3*3*256 | 2 | 14*14*256 | |
| 25 | 14*14*256 | 1*1*1024 | 1 | 14*14*1024 | |
| 26 | 14*14*1024 | 1*1*256 | 1 | 14*14*256 | 3 |
| 27 | 14*14*256 | 3*3*256 | 1 | 14*14*256 | |
| 28 | 14*14*256 | 1*1*1024 | 1 | 14*14*1024 | |
| 29 | 14*14*1024 | 1*1*256 | 1 | 14*14*256 | 3 |
| 30 | 14*14*256 | 3*3*256 | 1 | 14*14*256 | |
| 31 | 14*14*256 | 1*1*1024 | 1 | 14*14*1024 | |
| 32 | 14*14*1024 | 1*1*256 | 1 | 14*14*256 | 3 |
| 33 | 14*14*256 | 3*3*256 | 1 | 14*14*256 | |
| 34 | 14*14*256 | 1*1*1024 | 1 | 14*14*1024 | |
| 35 | 14*14*1024 | 1*1*256 | 1 | 14*14*256 | 3 |
| 36 | 14*14*256 | 3*3*256 | 1 | 14*14*256 | |
| 37 | 14*14*256 | 1*1*1024 | 1 | 14*14*1024 | |
| 38 | 14*14*1024 | 1*1*256 | 1 | 14*14*256 | 3 |
| 39 | 14*14*256 | 3*3*256 | 1 | 14*14*256 | |
| 40 | 14*14*256 | 1*1*1024 | 1 | 14*14*1024 | |
| 41 | 14*14*1024 | 1*1*512 | 1 | 14*14*512 | 4 |
| 42 | 14*14*512 | 3*3*512 | 2 | 7*7*512 | |
| 43 | 7*7*512 | 1*1*2048 | 1 | 7*7*2048 | |
| 44 | 7*7*2048 | 1*1*512 | 1 | 7*7*512 | 4 |
| 45 | 7*7*512 | 3*3*512 | 1 | 7*7*512 | |
| 46 | 7*7*512 | 1*1*2048 | 1 | 7*7*2048 | |
| 47 | 7*7*2048 | 1*1*512 | 1 | 7*7*512 | 4 |
| 48 | 7*7*512 | 3*3*512 | 1 | 7*7*512 | |
| 49 | 7*7*512 | 1*1*2048 | 1 | 7*7*2048 | |
| AvgPool | 7*7*2048 | 1*1*2048 | |||
| 50FC | 1*1*2048 | 2048 | |||
以Resnet50为backbone、一个全连接层作为head,形成一个花卉检测的cnn网络结构
加载数据集并划分训练集
import torch
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import numpy as np
from sklearn.model_selection import train_test_split
from torch.utils.data import Subset
# 数据预处理和增强
transform = transforms.Compose([
transforms.Resize((224, 224)), # 调整图像大小为 224x224像素
transforms.ToTensor(), # 转换为张量
transforms.Normalize(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5]) # 标准化
])
# 加载数据集
dataset = datasets.ImageFolder('flower', transform=transform)
# set_size = 200 # 设置要使用的数据集大小
# if len(dataset) > set_size:
# dataset = Subset(dataset, range(set_size))
# 划分训练集和测试集
train_size = int(0.7 * len(dataset))
test_size = len(dataset) - train_size
train_dataset, test_dataset = torch.utils.data.random_split(dataset, [train_size, test_size])
# 创建数据加载器
train_loader = DataLoader(train_dataset, batch_size=8, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=8, shuffle=False)
# 查看数据加载器的样本数量
print('训练集样本数量:', len(train_loader.dataset))
print('测试集样本数量:', len(test_loader.dataset))
class_labels = dataset.classes
print('花卉类别:',dataset.classes)
训练集样本数量: 3021
测试集样本数量: 1296
花卉类别: ['daisy', 'dandelion', 'rose', 'sunflower', 'tulip']
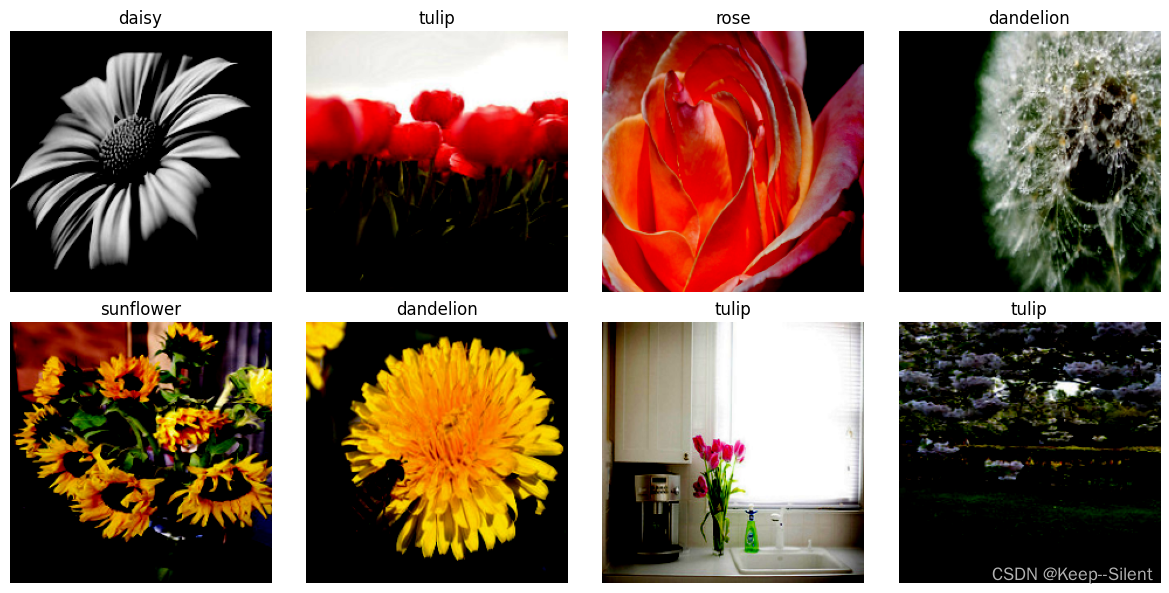
进行数据集的可视化
import matplotlib.pyplot as plt
from sklearn.preprocessing import MinMaxScaler
# 归一化转为[0,255]
transfer=MinMaxScaler(feature_range=(0, 255))
def visualize_loader(batch,predicted=''):
# batch=[32*1*224*224,32]
imgs=batch[0]
fig, axes = plt.subplots(2, 4, figsize=(12, 6))
labels=batch[1].numpy()
# print(imgs.shape)
if str(predicted)=='':
predicted=labels
for i, ax in enumerate(axes.flat):
img=imgs[i].permute(1, 2, 0).numpy()
img=np.clip(img, 0, 1)
ax.imshow(img)
title=class_labels[predicted[i]]
color='black'
if predicted[i]!=labels[i]:
title+= '('+str(class_labels[labels[i]])+')'
color='red'
ax.set_title(title,color=color )
ax.axis('off')
plt.tight_layout()
plt.show()
# loader.shape=3000*[32*1*224*224,32]
for batch in train_loader:
break
visualize_loader(batch)
残缺块ResidualBlock和网络ResNet50
# 残缺块和ResNet50
import torch
import torch.nn as nn
# 残缺块
class ResidualBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Conv2d(in_channels, in_channels//stride, kernel_size=3, stride=1, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(in_channels//stride)
self.relu = nn.ReLU(inplace=True)
self.conv2 = nn.Conv2d(in_channels//stride, in_channels//stride, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(in_channels//stride)
self.conv3 = nn.Conv2d(in_channels//stride, out_channels, kernel_size=3, stride=1, padding=1, bias=False)
self.bn3 = nn.BatchNorm2d(out_channels)
self.shortcut = nn.Sequential()
# 将输入特征图通过1x1的卷积操作调整其通道数,使其与残差块的输出特征图具有相同的通道数,以便进行跳跃连接
if stride != 1 or in_channels!=out_channels:
self.shortcut = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(out_channels)
)
def forward(self, x):
residual = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.conv3(out)
out = self.bn3(out)
out += self.shortcut(residual)
out = self.relu(out)
return out
# ResNet50
class ResNet50(nn.Module):
def __init__(self, num_classes=1000):
super(ResNet50, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64)
self.relu = nn.ReLU(inplace=True)
self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.layer1 = self._make_layer(64, 256, blocks=3, stride=1)
self.layer2 = self._make_layer(256, 512, blocks=4, stride=2)
self.layer3 = self._make_layer(512, 1024, blocks=6, stride=2)
self.layer4 = self._make_layer(1024, 2048, blocks=3, stride=2)
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.flatten = nn.Flatten()
def _make_layer(self, in_channels, out_channels, blocks, stride):
layers = []
layers.append(ResidualBlock(in_channels, out_channels, stride))
for _ in range(1, blocks):
layers.append(ResidualBlock(out_channels, out_channels))
return nn.Sequential(*layers)
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.maxpool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avgpool(x)
x = self.flatten(x)
return x
CNN(Resnet50:backbone,Linear:head)
import torch
import torch.nn as nn
import torchvision.models as models
class CNN(nn.Module):
def __init__(self, num_classes=5):
super(CNN, self).__init__()
# 骨干网络(ResNet-50)
self.backbone = ResNet50()
# 头部(Head)
self.head = nn.Sequential(
nn.ReLU(inplace=True),
nn.Linear(2048, num_classes)
)
def forward(self, x):
x = self.backbone(x)
x = self.head(x)
return x
model = CNN()
print(model)
CNN(
(backbone): ResNet50(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): ResidualBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResidualBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(2): ResidualBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
)
(layer2): Sequential(
(0): ResidualBlock(
(conv1): Conv2d(256, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResidualBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(2): ResidualBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(3): ResidualBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
)
(layer3): Sequential(
(0): ResidualBlock(
(conv1): Conv2d(512, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResidualBlock(
(conv1): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(2): ResidualBlock(
(conv1): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(3): ResidualBlock(
(conv1): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(4): ResidualBlock(
(conv1): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(5): ResidualBlock(
(conv1): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(1024, 1024, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
)
(layer4): Sequential(
(0): ResidualBlock(
(conv1): Conv2d(1024, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResidualBlock(
(conv1): Conv2d(2048, 2048, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(2048, 2048, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(2048, 2048, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
(2): ResidualBlock(
(conv1): Conv2d(2048, 2048, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(2048, 2048, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(2048, 2048, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(shortcut): Sequential()
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(flatten): Flatten(start_dim=1, end_dim=-1)
)
(head): Sequential(
(0): ReLU(inplace=True)
(1): Linear(in_features=2048, out_features=5, bias=True)
)
)
训练模型
import torch.optim as optim
import time
num_epochs=7
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model.to(device)
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(), lr=0.003)
for epoch in range(num_epochs):
model.train()
running_loss = 0.0
correct = 0
total = 0
start_time = time.time()
for images, labels in train_loader:
images = images.to(device)
labels = labels.to(device)
# 前向传播
outputs = model(images)
loss = criterion(outputs, labels)
# 反向传播和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
# 统计准确率
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
running_loss += loss.item()
train_loss = running_loss / len(train_loader)
train_accuracy = correct / total
# 在测试集上评估模型
model.eval()
test_loss = 0.0
correct = 0
total = 0
with torch.no_grad():
for images, labels in test_loader:
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
loss = criterion(outputs, labels)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
test_loss += loss.item()
end_time=time.time()
duration = int(end_time - start_time )
m,s=duration//60,duration%60
test_loss = test_loss / len(test_loader)
test_accuracy = correct / total
torch.save(model.state_dict(), 'FlowerRecognitionModel.pth')
# 打印训练过程中的损失和准确率
print(f"Epoch [{epoch+1}/{num_epochs}] :{m}minutes{s}seconds")
print(f" Train Loss: {train_loss:.4f}, Train Accuracy: {train_accuracy:.4f}")
print(f" Test Loss: {test_loss:.4f}, Test Accuracy: {test_accuracy:.4f}")
Epoch [1/7] :3minutes5seconds
Train Loss: 1.1862, Train Accuracy: 0.4826
Test Loss: 1.1131, Test Accuracy: 0.5154
Epoch [2/7] :3minutes11seconds
Train Loss: 1.1405, Train Accuracy: 0.5008
Test Loss: 1.0442, Test Accuracy: 0.5409
Epoch [3/7] :3minutes11seconds
Train Loss: 1.1196, Train Accuracy: 0.5167
Test Loss: 1.1199, Test Accuracy: 0.5386
Epoch [4/7] :3minutes11seconds
Train Loss: 1.0836, Train Accuracy: 0.5468
Test Loss: 0.9931, Test Accuracy: 0.6119
Epoch [5/7] :3minutes10seconds
Train Loss: 1.0372, Train Accuracy: 0.5922
Test Loss: 0.9380, Test Accuracy: 0.6312
Epoch [6/7] :3minutes9seconds
Train Loss: 0.9958, Train Accuracy: 0.6087
Test Loss: 0.9079, Test Accuracy: 0.6535
Epoch [7/7] :3minutes9seconds
Train Loss: 0.9515, Train Accuracy: 0.6316
Test Loss: 0.8918, Test Accuracy: 0.6543
保存和加载模型
#保存模型
# torch.save(model.state_dict(), 'FlowerRecognitionModel.pth')
# 创建一个新的模型实例
model = CNN()
# 加载模型的参数
model.load_state_dict(torch.load('FlowerRecognitionModel.pth'))
<All keys matched successfully>
测试模型
for batch in test_loader:
break
imgs=batch[0]
outputs = model(imgs)
_, predicted = torch.max(outputs.data, 1)
predicted=predicted.numpy()
visualize_loader(batch,predicted)

有一定的准确度了,模型能差不多识别就好,因为资源问题,就没有一直练下去了。















 2863
2863











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









