







GAMES101: 现代计算机图形学入门
链接:GAMES101
1. 几何
1.1 几何的表示
隐式几何:通过一个函数表达式来表示的几何体,即 f(x,y,z)=0。
- 优点:很容易判断一个点在不在几何体上。
- 缺点:很难通过表达式看出几何体的形状。
显式几何:通过参数映射的方法来表示的几何体,即每个(u,v)都有对应的(x,y,z)。

- 优点:我们只需遍历所有的(u,v)即可得到几何的形状。
- 缺点:很难判断一点是否在几何体上。
1.2 隐式几何
1.2.1 CSG(Constructive Solid Geometry)
基本的几何体通过基本的运算(交、叉、并)得到的复杂几何体,这操作被称为CSG。

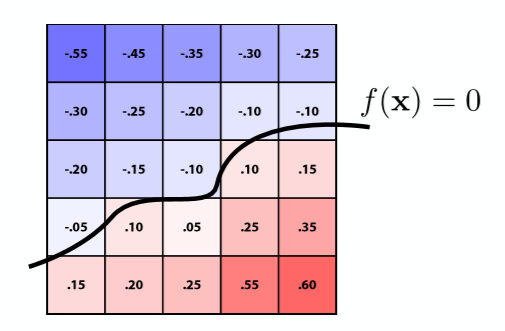
1.2.2 距离函数(SDF)
距离函数:任何一个点到达边界的最短距离,在内部为正,在外部为负。

我们想要得到一个逐渐混合的东西,比如下面的融合就需要用上图的SDF的混合,而不是原本的混合。通过距离函数的融合,相当于实现了表面特征的融合。

几何体的边界,即为SDF=0,类似于等高线,下图为水平集的表示方法,当然有其他方法。
1.2.3 分型
- 特点:自相似,自己和整体长得很像,与递归结构一致。

1.3 显式几何
1.3.1 点云
- 点云是空间中很多很多点的集合,只要点足够密集那么一定能表示任意的几何体。
- 如果点云的点不够密集,那么就会看不出形状。
1.3.2 多边形网格
将面拆分为三角形或者四边形,存储三角形的顶点信息。

使用.obj的文件存储几何体的顶点(v)、面的法线(vn)、纹理坐标(vt)和这三者之间的关系(f)。关系的表示方式f(v/vt/vn),即三角形由哪三个顶点,哪三个纹理坐标,哪三个法线来表示。

1.3.3 贝塞尔曲线
一定要经过起止点,若干个控制点用于控制曲线弯曲的方向,最终形成一条光滑的曲线。
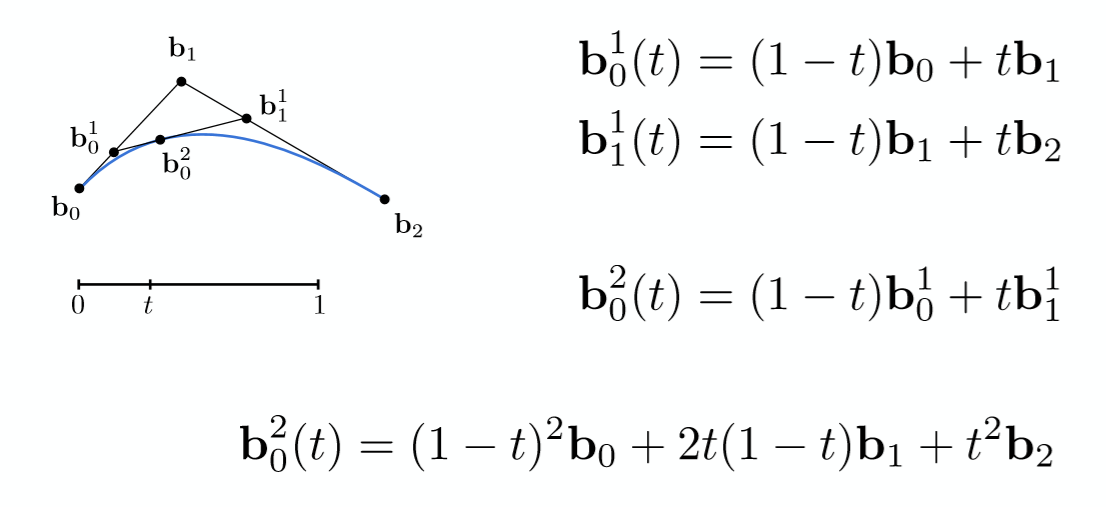
用t在各点之间不断的做lerp插值,最终会递归成一条光滑的曲线。

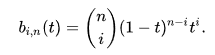
分析即可得到代数表达式为一个二项分布的多项式,称为伯恩斯坦多项式。
贝塞尔曲线的性质:
(1)在仿射变换下,贝塞尔曲线不变,也就是可以直接对曲线进行仿射变换;而在投影变换下,贝塞尔曲线会变。
(2)凸包性质:连接最外围的控制点,贝塞尔曲线一定在连出来的凸包内。特殊的,控制点为一条直线,贝塞尔曲线即为相同的直线。
(3)逐段的贝塞尔曲线:如果点太多,我们一般每4个控制点定义一条光滑的贝塞尔曲线。
(4)CN连续性:为了保证逐段的贝塞尔曲线的光滑连接,我们需要保证连续。C0连续:一段的终止点等于下一段的起点;C1连续:终止点等于起点,并且该点为两边的中点。

其它的曲线
B-Splines(Basis Splines):奇函数样条线,拥有局部性(拖拽一两个点,不影响整体)。
本节课不深入介绍,详情了解:清华大学-计算机图形学基础(国家级精品课)
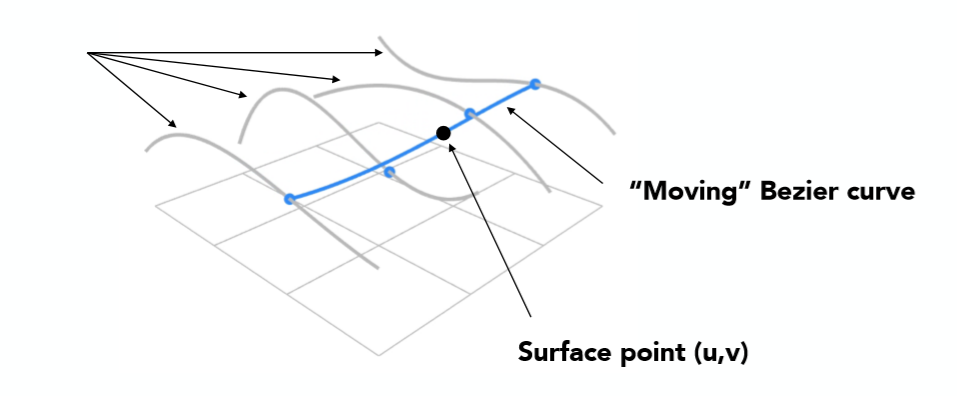
1.3.4 贝塞尔曲面
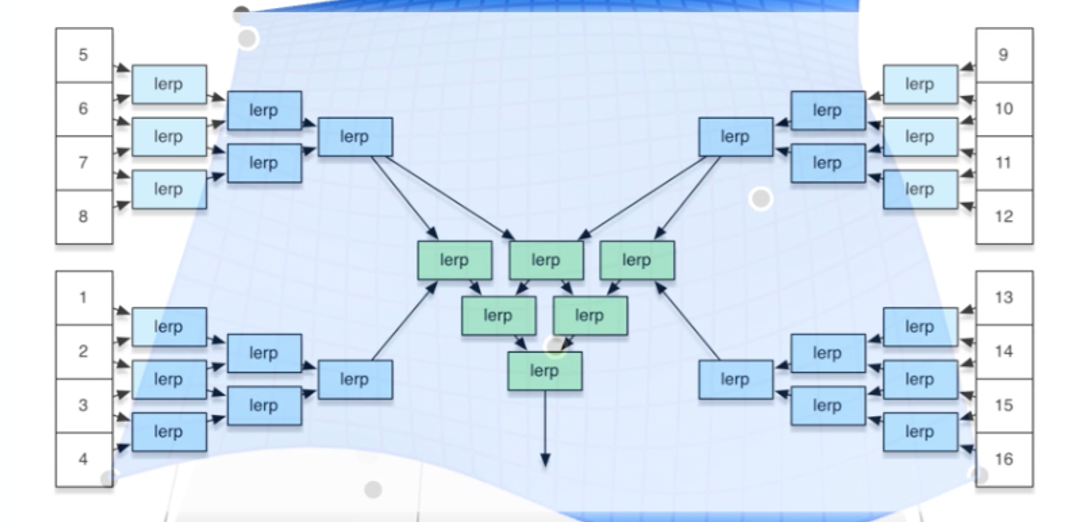
用16个点去控制形成的曲面,先在u方向的形成4条贝塞尔曲线,再在4条贝塞尔曲线上,在v方向控制出最终的点(u,v)。
1.4 网格细分
1.4.1 Loop细分
注意:Loop不是循环,而是发明者的名字。
loop细分直接用三角形三条边的中点拆分为4个三角形,先细分再调整。
对于新的顶点,我们对其周围的原来的点求平均。

对于原来的顶点,我们认为不止和邻近的原来顶点的值有关,还与自己的值有关,因此求个加权。即邻近的顶点很多,那么更多的相信邻近的点,如果邻近的顶点很少,更多的相信自己。
定义:n为顶点的度(连接边的数量),u为与度有关的数,如果n=3,u=3/16,其余情况下u=3/(8n)。

1.4.2 Catmull-Clak细分
我们定义
(1)四边形面:四条边的面
(2)奇异点:度不为4的点
我们注意到,在非四边形面上点一个中点,因为该点要与各边中点相连,那么该点一定是奇异点,同时该非四边形面会减少。

同时,定义顶点的变化,都是平均的方式进行细分。
定义:f为面上的中点(新点),e为边上的中点(新点),v为原来的点(老点),p为该点自己(老点)。

2. 光线追踪
2.1 阴影图(Shadow Mapping)
2.1.1 硬阴影
- 从光源看向场景,记录所有能看到点的深度,形成一张深度图。
- 从真正的摄像机看向场景,把所有能看到的点投影回光源的位置,形成另一张深度图。
- 比较两张深度图,深度相同的,即为能看到的,深度不同的就是阴影。
2.1.2 软阴影
软阴影是针对光源有一定大小的优化,如下图的半阴影区。

2.2 Whitted-Style 光线追踪
Whitted-Style即模拟光线不断弹射的过程(光线的反射和折射)。
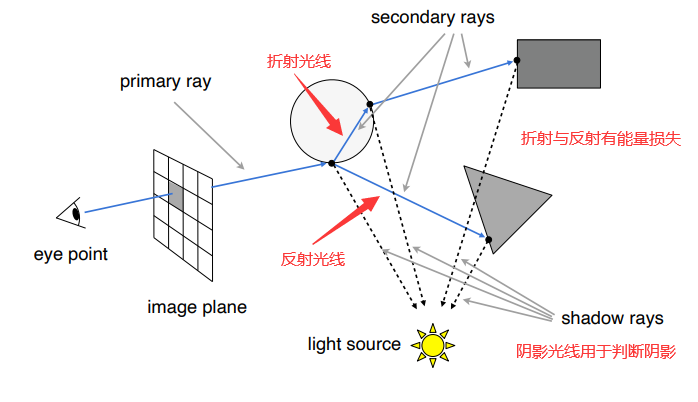
2.2.1 光线的定义
注意:规定光线沿直线传播,不考虑其波动性,光线与光线之间不会碰撞,所有的光线可理解为光源射向我们的眼睛。
我们将光线理解为从一个点出发,向某一方向发出的射线。
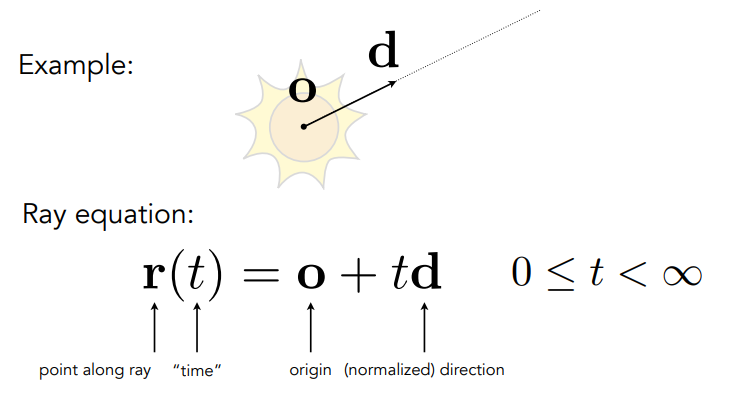
注意:光线定义中的r(t)一定是一个点。
2.2.2 光线与球面求交
球面的方程:球上的点到球心的距离等于半径。

2.2.3 光线与三角形面求交
我们拆分为两部分,第一步我们求光线与三角形所在的平面求交,第二步判断该点是否在三角形内。
平面的方程:利用点法式写出平面的方程。

我们将光线的方程与平面的方程联立求解,求出t。

使用MT算法进行优化(三角形内部点的方程使用重心坐标写出,再进行联立求解)。

符合正解的条件:t,b1,b2均为正数。
2.3 加速结构
我们把光线与所有的三角形都要求交,弹射多次计算过程会非常慢,因此我们需要加速这一过程。
2.3.1 包围盒
包围盒(Bounding Volumes):我们使用简单的形状将物体包起来。
如果光线连包围盒都碰不到,那更不可能碰到包围盒中的物体,以下为二维的包围盒。

对于三维空间的长方体,我们理解为三对不同的沿x、y、z轴的对立面组成的集合,即轴对齐包围盒(AABB)。
2.3.2 光线与包围盒求交
我们以二维为例,我们对所有轴都做与之相交的tmin和tmax,最后我们算出最大的tmin和最小的tmax。

对于三维也是一样,当光线进入三个对立面时,才算进入盒子,当光线出了一个对立面,就算离开盒子了。
- 检查进入的时间小于离开的时间那么光线一定会进入盒子一段时间。
- 检查离开的时间是否小于0,即盒子一定早于射线,不可能穿过盒子,一定没有交点。
- 检查离开的时间大于等于0,但是进入的时间小于0,即光线一定在盒子里,光线与盒子一定有交点。
综上我们得出光线与盒子有交点的条件为:进入时间小于离开时间,并且离开时间要大于0。
对于包围盒求交点的优化:我们联立算出对立面的其中一个,又因为平行,就可以算出另一个对立面的参数t。

(1)在光线追踪之前,首先找到包围盒,把包围盒分成一个个格子的网格。
(2)遍历网格,若网格中存在物体的表面使用灰色标记。

(3)以光线射的方向开始计算,计算出光线能遍历到的网格,如下图光线方向,只需判断右和上面的格子。(光栅化一条线)
(4)判断网格中是否存在物体表面(即灰色标记),若有则光线有可能和物体相交,进一步判断光线与物体求交。

注意:如何定划分的网格数量?格子的数量 = C * 物体的数量,C = 27,当然实际情况中不一定。
2.3.3 空间划分
实际情况下,物体在场景中一定是不均匀的,因此我们的网格划分也应该不均匀,引出了很多空间划分的分类。

Oct-Tree:八叉树,在三维空间中,每次均匀的分为8块。
KD-Tree:每次以轴向方向划分为两部分,一般以不同轴向交替划分,因此每次细分为两部分,结构类似二叉树。
BSP-Tree:与KD-Tree类似,只是不是以轴向方向进行划分,因此很难计算。
由于KD-Tree好算且优良,我们以KD-Tree为例分析。
KD-Tree划分步骤:

我们以KD-Tree划分的方式构建二叉树,使用AABB,从根节点开始判断所有点与光线是否存在交点。若存在交点,则该点的两个子节点都可能存在交点,逐层往下判断直至判断到叶子结点。
注意:中间的结点只存储指针,叶子结点才存储实际的物体。

KD-Tree的缺点:
(1)难以判断划分的包围盒与物体构成的三角形是否相交,即盒子如何与三角形求交的问题。
(2)同一个物体可能划分到了两个不同的包围盒中。
2.3.4 物体划分
BVH(Bounding Volume Hierarchy)是对物体进行划分,为解决KD-Tree的缺点,我们可以选择使用BVH。
划分步骤:
(1)按照三角形进行划分,一个物体只可能存在在一个包围盒中。
(2)找到一个包围盒,使用递归直接对包围盒中的三角形进行分组,分成两部分,再重新计算他们的包围盒。
(3)当叶子节点中存在足够少的三角形就停止划分。


注意:
(1)每次划分沿着最长的轴进行划分,同时划分沿着xyz轴。
(2)划分时通常寻找一个变量的中位数进行划分,保证划分出的树接近平衡,便于查找。对于这个变量我们可以选择三角形的重心坐标,此处可以用排序的更多算法(TopK问题、快速选择)自行了解。
Intersect(Ray ray, BVH node)
{
/** 光线与盒子不相交 */
if (ray misses node.bbox)
return;
/** 光线与盒子相交,且节点是叶子节点 */
if (node is a leaf node)
test intersection with all objs; // 判断盒子中所有的三角形
return closest intersection; // 返回最近的一个三角形
/** 光线与盒子相交,且节点不是叶子节点 */
hit1 = Intersect(ray, node.child1); // 递归判断
hit2 = Intersect(ray, node.child2);
return the closer of hit1, hit2;
}
2.4 路径追踪
由于Whitted-Style 光线追踪的效果不真实,我们要研究真实的物理量,因此引入辐射度量学,也就是路径追踪。
我们定义光照的几个属性:
(1)Radiant Energy
(2)Radiant Flux
(3)Rediant Intensity
(4)Rediant Irradiance
(5)Radiant Radiance
2.4.1 辐射度量学
1. Radiant Energy(Q)
定义:光线辐射出来的能量,用Q表示,单位为J(焦耳)。

2. Radiant Flux
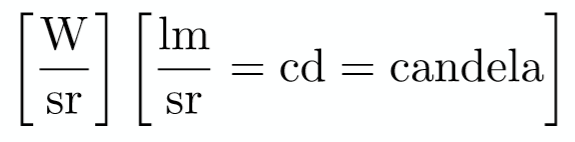
定义1:单位时间内的能量,与功率类似,单位为W(瓦特)或者 lm(流明)。
定义2:在物理上,理解为单位时间内通过一个感光平面的光子的数量。

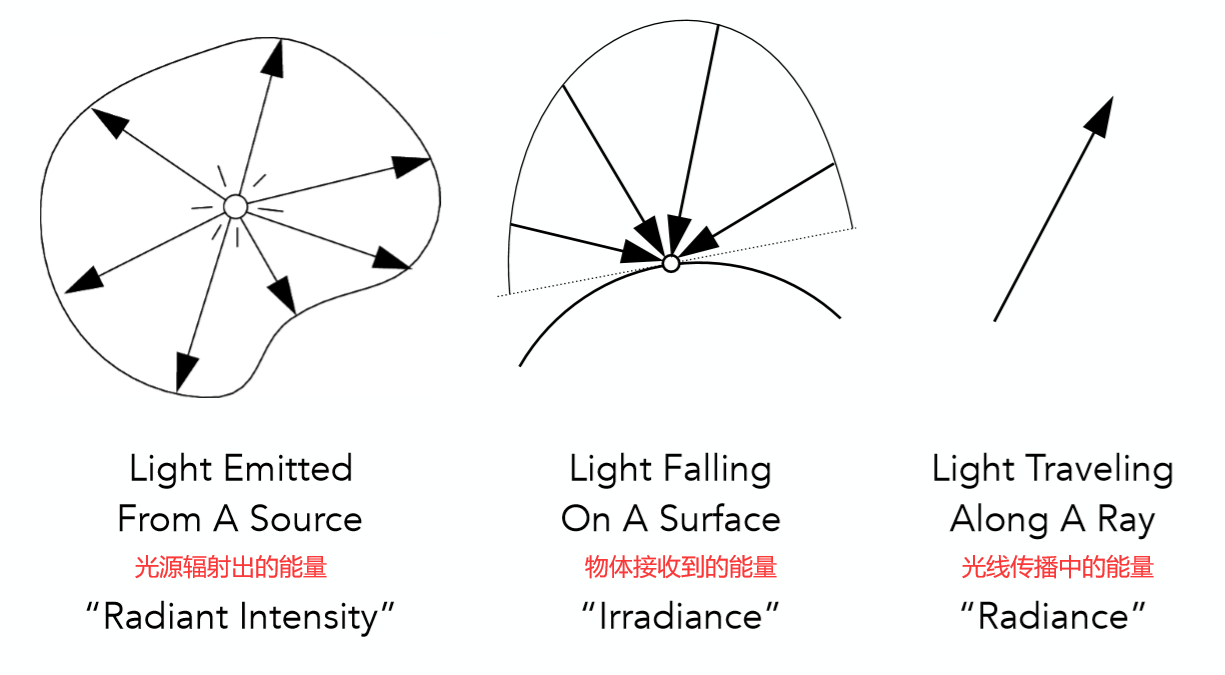
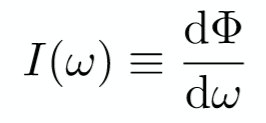
3. Rediant Intensity(I)
定义:单位立体角上功率的大小,用I表示,单位为cd(坎德拉)。
弧度制:θ=l/r,l为弧长,r为半径。整个圆弧度为2π。
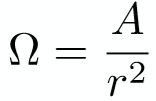
立体角:以w方向投影到球面坐标系中,并以dθ和dϕ表示。(极小的变化求微分)

dw为立体角微分,A为圆面积,r为半径。整个立体角为4π。
对于点光源,立体角为4π。

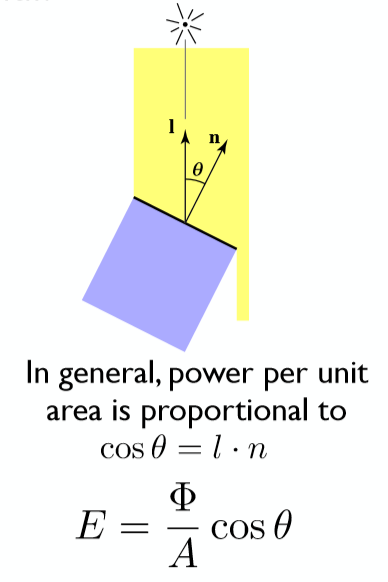
4. Rediant Irradiance(E)
定义:单位面积上,某个点接收到的功率,用E表示,单位为Lux(勒克斯)。

此功率方向与面积法线方向一致,需要处理成投影的cosθ
5. Radiant Radiance(L)
定义:单位面积上,单位立体角上,某个点接收到的功率,用L表示,单位为nit(尼特)。

注意:我们考虑dA入射和出射的能量。
Rediant Irradiance与Rediant Radiance的区别:
Irradiance是一个点接收到来自所有立体角的光线的能量。
Radiance是一个点接收到来自某一立体角的光线的能量。
因此Irradiance可看做所有立体角的Radiance求和。

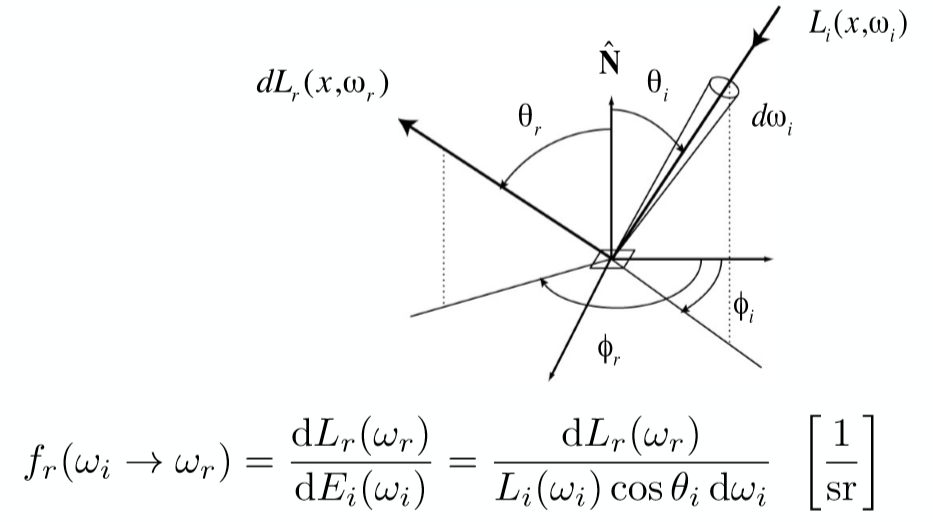
2.4.2 双向反射分布函数(BRDF)
BRDF(Bidirectional Reflectance Distribution Function)
我们将反射理解为光线打到一个点上,光的能量被点吸收了,剩下的能量就是反射出去的能量。这与材质相关,因此BRDF可以定义材质的反射光的能力。
BRDF定义了一个点沿某个立体角反射出的L与沿某个方向接收到的E之间的比值,因此表示了入射光与反射光的比例关系。
我们将所有的入射立体角进行积分,我们能得到沿某一方向出射的L。
这就是反射方程,研究了在不同方向光照的情况下,我们规定一个特定的观测方向,观察到的L.。

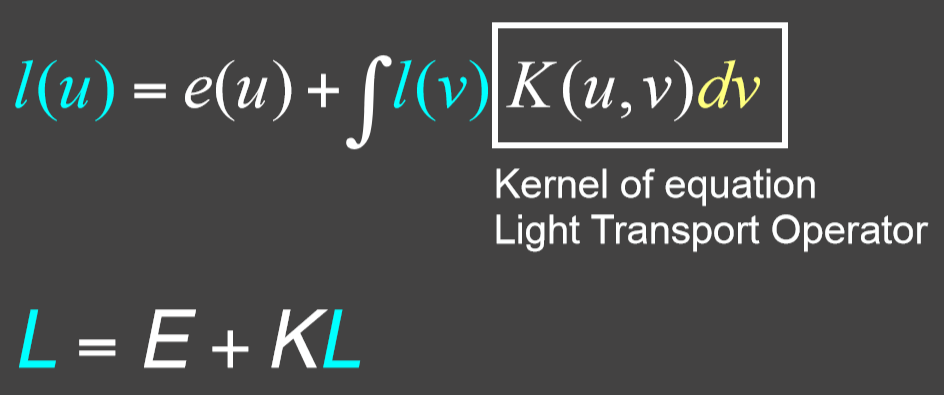
2.4.3 渲染方程
渲染方程定义了自发光Le和反射光,即渲染方程等于自发光加上反射方程。

注意:n·wi = cosθ
渲染方程定义了所有光线传播的规律,渲染方程也是现代图形学的基础!
我们将渲染方程写成数学表达,采用微分算子和二项式定理进行求解。
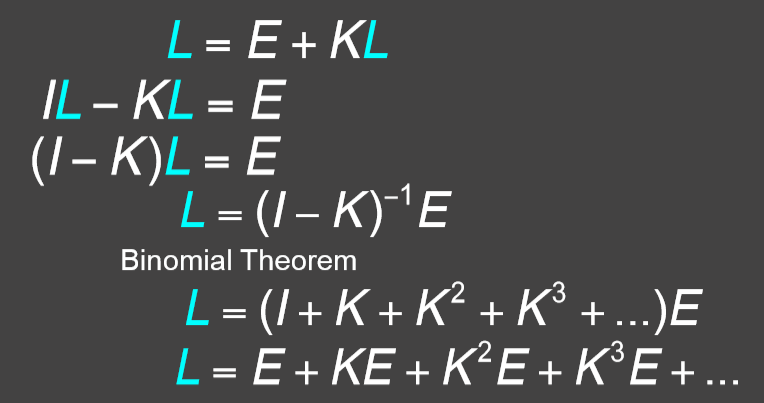
注意:
(1)E为自身的能量,KE为一次反射的能量(直接光照),K2E为两次反射的能量(间接光照),以此类推。
(2)L可简单的理解为全局光照,即直接光照+间接光照。
(3)光栅化只能做E+KE(光源自己和直接光照),后面的光栅化很难实现,而光线追踪就是解决后面部分的。
(4)K一定小于1,所以全局光照一定会收敛到一个值,而不会一直变亮。


上面的效果是直接光照(左图),加上反射一次后的全局光照(右图),光栅化一般只得到左图的结果。
2.4.4 蒙特卡洛积分
蒙特卡洛积分是去用概率论的办法来求一个定积分的值,我们对函数域进行多次采样,采样值求出一个均值作为均值的近似值。

使用蒙特卡洛积分去求解渲染方程

使用蒙特卡洛积分,相当于朝所有方向随机的打一条射线,如果打中就求解对应的渲染方程,打中的概率即为pdf(wi),pdf(wi)因为是对半球上立体角的平均,所以是1/2π。
/** 直接光照的路径追踪 */
shade(p, wo)
Randomly choose N directions wi~pdf
Lo = 0.0
For each wi
Trace a ray r(p, wi)
If ray r hit the light
Lo += (1 / N) * L_i * f_r * cosine / pdf(wi) // 应用蒙特卡洛积分
Return Lo
通过递归的方法直接能写出全局光照的路径追踪。
/** 全局光照的路径追踪 */
shade(p, wo)
Randomly choose N directions wi~pdf
Lo = 0.0
For each wi
Trace a ray r(p, wi)
If ray r hit the light
Lo += (1 / N) * L_i * f_r * cosine / pdf(wi)
Else If ray r hit an object at q
Lo += (1 / N) * shade(q, -wi) * f_r * cosine / pdf(wi) // 应用蒙特卡洛积分递归地求间接光照
Return Lo
上述代码会出现的问题与解决:
(1)如果使用递归的方法,第一次假设是100个,第二次就会递归成10000个,增量是指数级的。只有当蒙特卡洛积分的采样为1时才不会出现指数级的爆炸,因此我们用N = 1来解决,这就是路径追踪(N = 1),而分布式光线追踪(N != 1)此处不管。
shade(p, wo)
Randomly choose ONE direction wi~pdf(w) // 只选择一个w
Trace a ray r(p, wi)
If ray r hit the light
Return L_i * f_r * cosine / pdf(wi)
Else If ray r hit an object at q
Return shade(q, -wi) * f_r * cosine / pdf(wi)
而N = 1一定会造成很大的误差,因此我们选取多个路径求平均。
ray_generation(camPos, pixel)
Uniformly choose N sample positions within the pixel
pixel_radiance = 0.0
For each sample in the pixel
Shoot a ray r(camPos, cam_to_sample)
If ray r hit the scene at p
pixel_radiance += 1 / N * shade(p, sample_to_cam) // 选取N个不同的位置,每次shade求平均
Return pixel_radiance
(2)递归没有结束条件,因此会无限循环。我们可以使用Russian Roulette(俄罗斯轮盘赌)的方法,选取随机数,让其会停止递归,如果随机值不用停止,我们返回L/P,如果停止,我们返回0,最终的期望一定和原值L一致。

核心思想:使用Russian Roulette(俄罗斯轮盘赌),即无偏估计;利用期望E不变并限制P来随机解决问题。
shade(p, wo)
Manually specify a probability P_RR
Randomly select ksi in a uniform dist. in [0, 1] // 产生一个随机数
If (ksi > P_RR) return 0.0; // 如果限制条件,则直接返回0
Randomly choose ONE direction wi~pdf(w)
Trace a ray r(p, wi)
If ray r hit the light
Return L_i * f_r * cosine / pdf(wi) / P_RR
Else If ray r hit an object at q
Return shade(q, -wi) * f_r * cosine / pdf(wi) / P_RR
2.4.5 提高效率
我们如果只用均匀的方法进行蒙特卡洛积分,那么对于光源很小的情况,可能就需要很多光线才能成功。
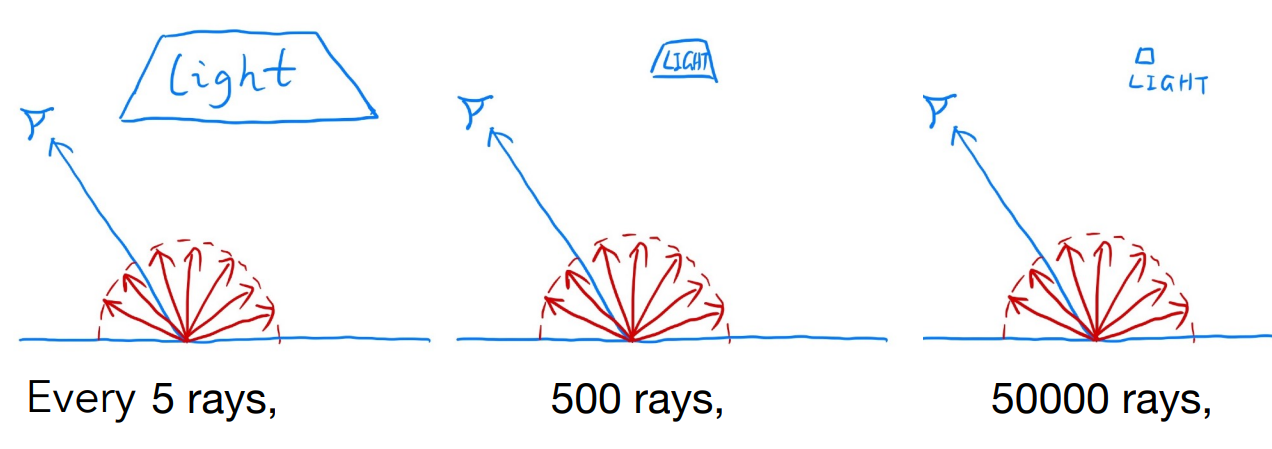
因此我们为了改进,我们只对光源进行采样,把渲染方程写成对光源表面积的积分。
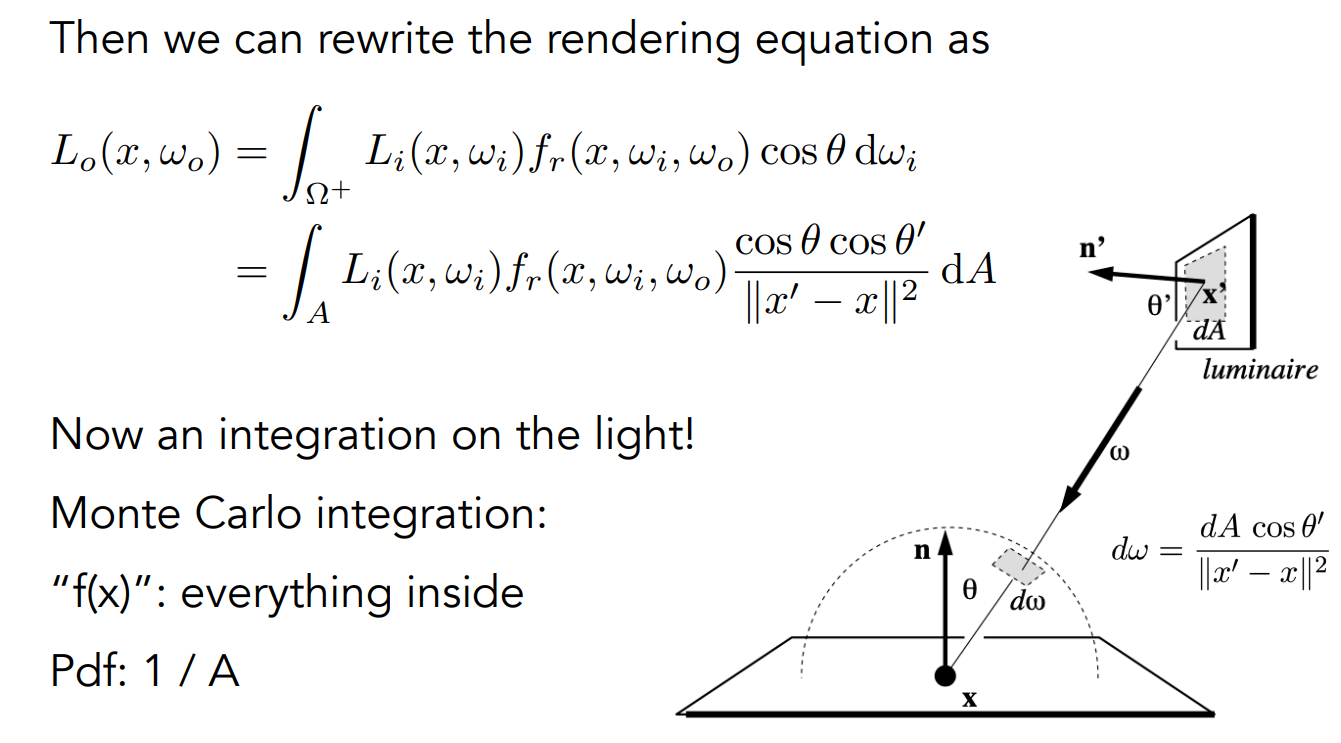
shade(p, wo)
// 直接从光源射出的射线,转换到dA面积上积分
Uniformly sample the light at x’ (pdf_light = 1 / A)
L_dir = L_i * f_r * cos θ * cos θ’ / |x’ - p|^2 / pdf_light
// 其他的反射光线
L_indir = 0.0
Test Russian Roulette with probability P_RR
Uniformly sample the hemisphere toward wi (pdf_hemi = 1 / 2pi)
Trace a ray r(p, wi)
If ray r hit a non-emitting object at q
L_indir = shade(q, -wi) * f_r * cos θ / pdf_hemi / P_RR
Return L_dir + L_indir
2.5 光线追踪遗留问题
课程中未讲到的问题,之后可自行了解:
(1)怎么对函数进行采样,给你任意一个函数怎么采样它(采样理论)
(2)选择什么样的pdf(重要性采样理论)
(3)选择什么样的随机数(low discrepancy sequences)
(4)采样方法的混合,比如上面的对面积采样和对半球采样的混合(multiple imp. sampling)
(5)为什么所有的Radiance的平均就是单个像素的Radiance(pixel reconstruction filter)
(6)对一个像素来说,Radiance怎么转化为Color(伽马矫正,曲线,颜色空间)

















 237
237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









