






基于STM32F103C8T6控制步进电机的转速、转向(用的江科大代码改的)
概要
在各种网站上看了好多关于步进电机的控制方式的文章,但是很少有人全部公开,一些公开的代码,自己又看不懂,索性自己好好研究一下然后开源出来供大家使用。这个文章写的只是简单的控制步进电机,复杂的功能请大家自行补充。
整体架构流程
提示:这里可以添加技术整体架构
本文使用的是标准库函数,使用的是42步电机,驱动使用的是TB6600,连线用的是共阴接法。读本篇文章直接请大家先看看这位博主写的关于转速计算的文章,以及运行方式。
技术名词解释
提示:这里可以添加技术名词解释
本文用的是1rad/s的转速,转速更改只需要改三个地方的数值即可

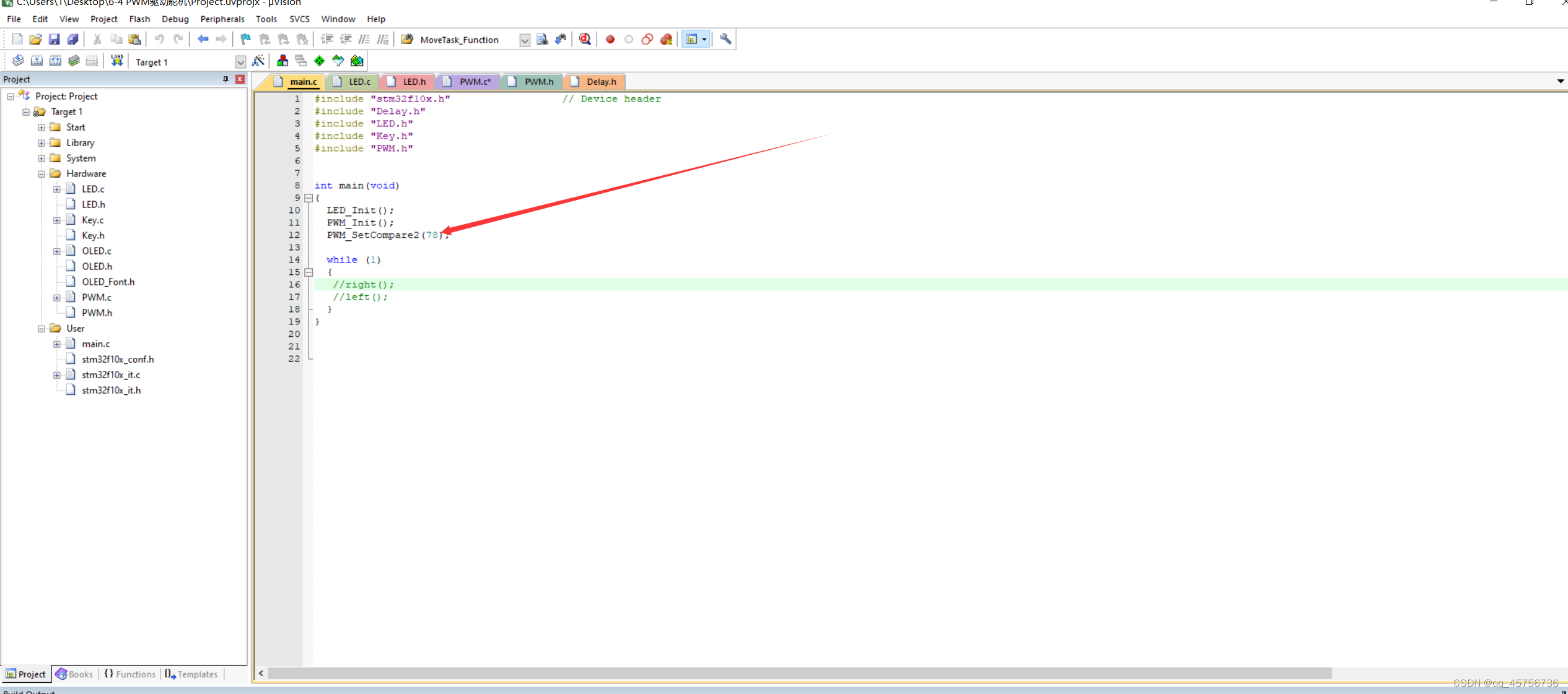
上述两张图片是更改pwm脉冲的

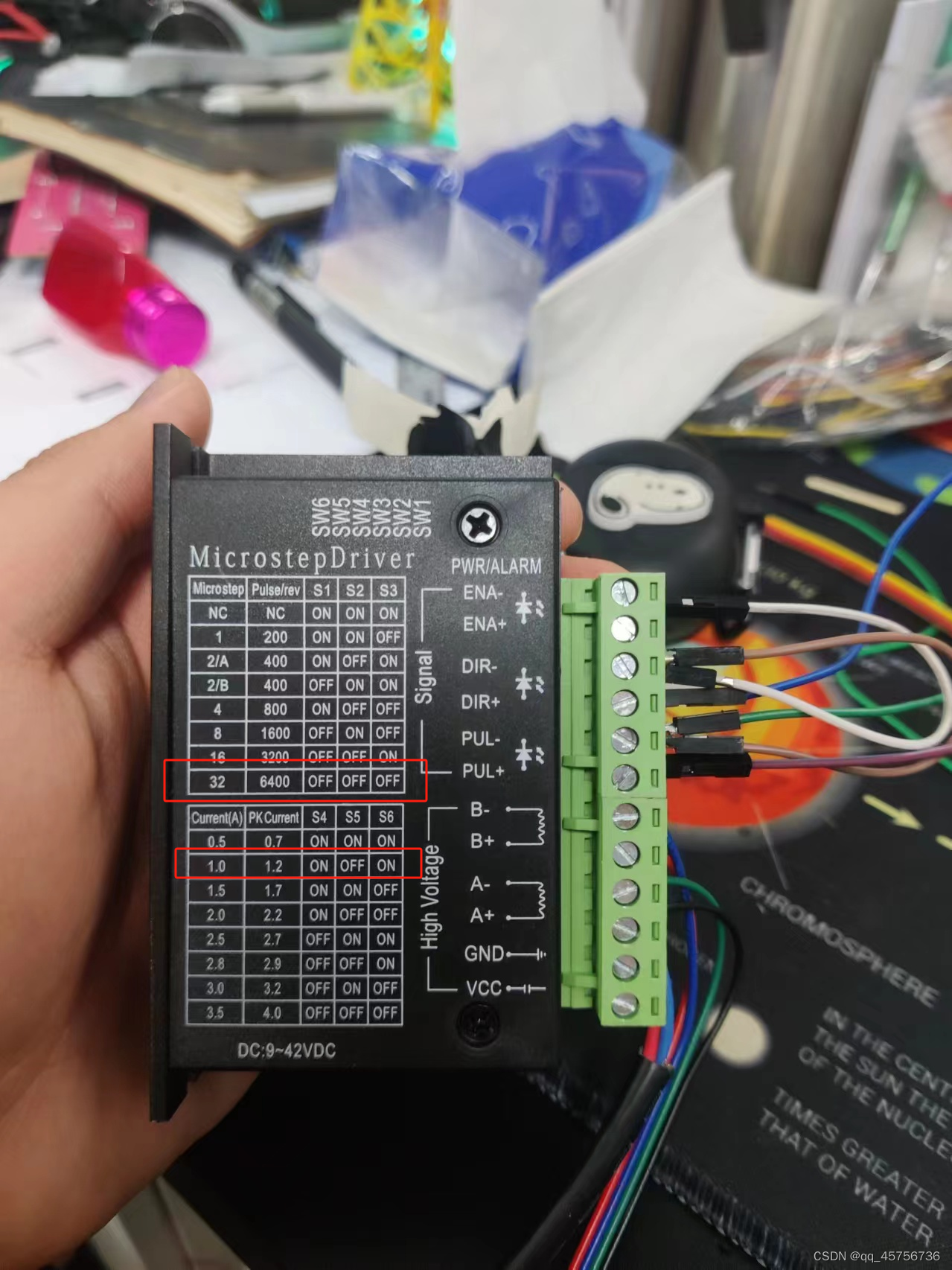
上述两图是我使用的电机型号以及驱动型号,驱动的红色方框是我使用的挡位。
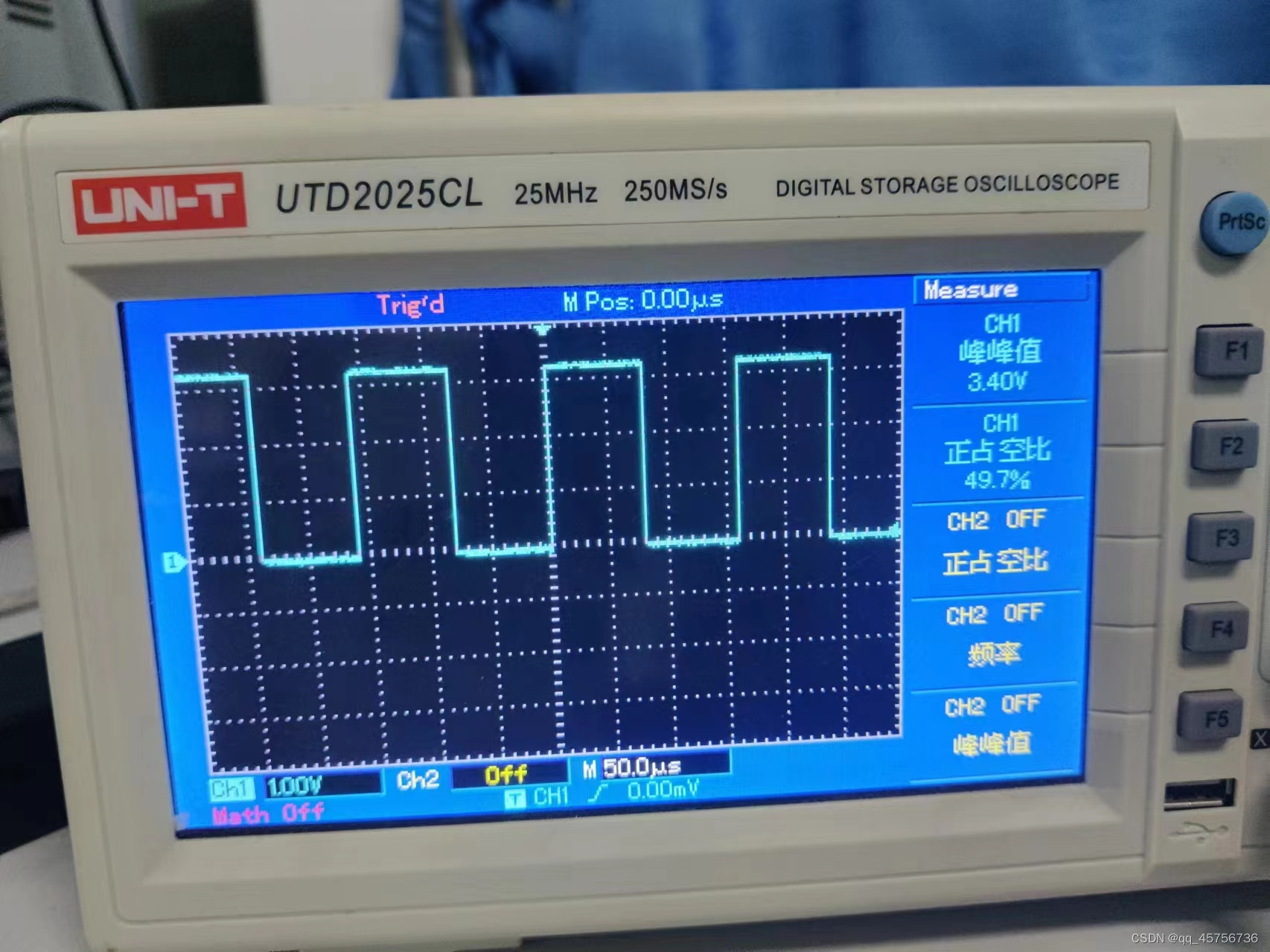
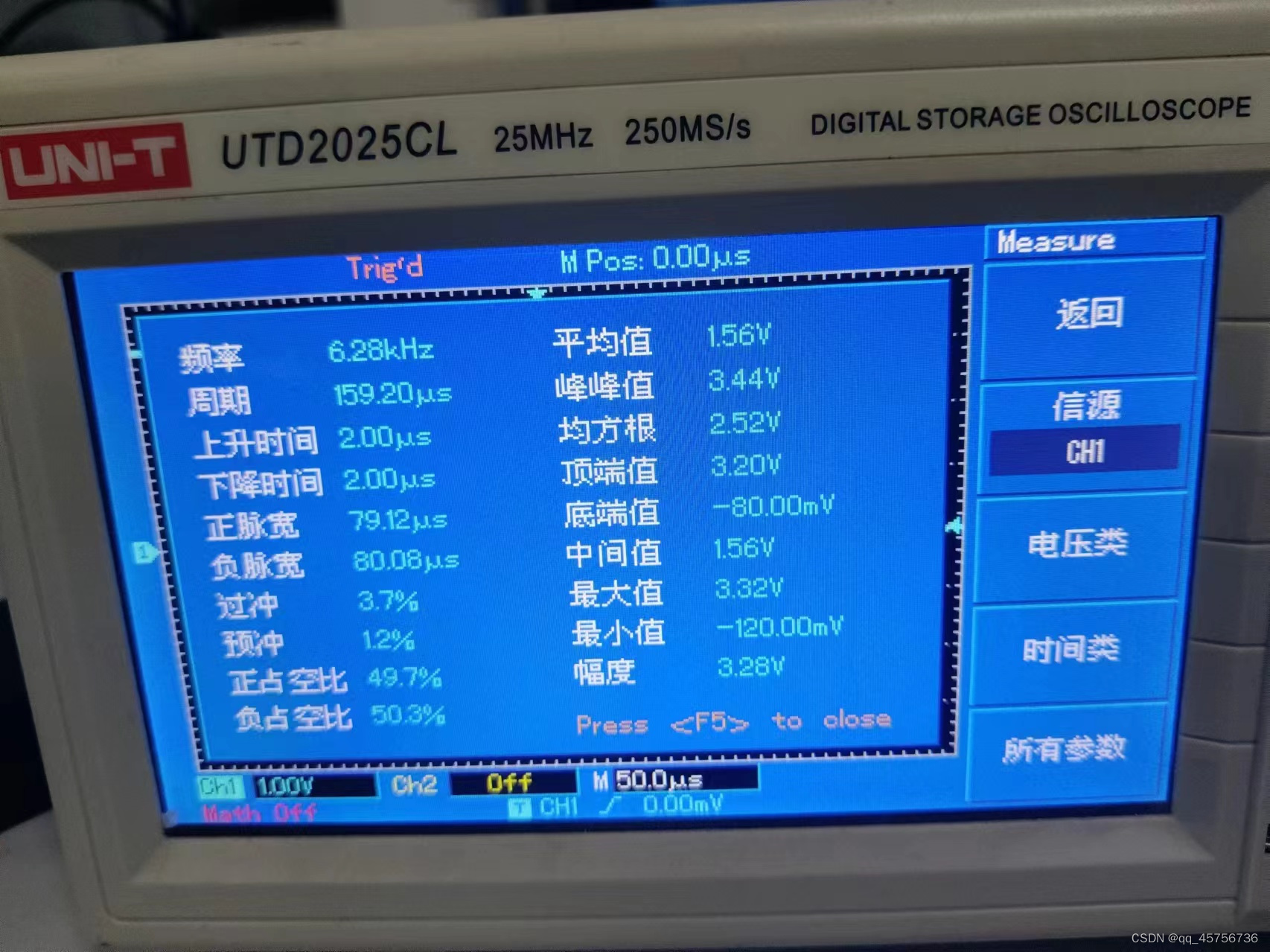
上述两图是个人使用的pwm型号,跟人家文章计算的误差不大,大家可放心使用。
小结
提示:这里可以添加总结
本文用的PA2作为方向接口
用的PA1作为PWM输出接口
运行前将主函数中的任意一个注释去掉即可实现左右转
本文是个人学习的记录,如有错误敬请担待。
最后大家附上代码供大家参考。
链接:https://pan.baidu.com/s/1ldDcDeSODqU2m6ED55R9zg
提取码:jxju

















 1215
1215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









