







目录
无刷电机的驱动原理:
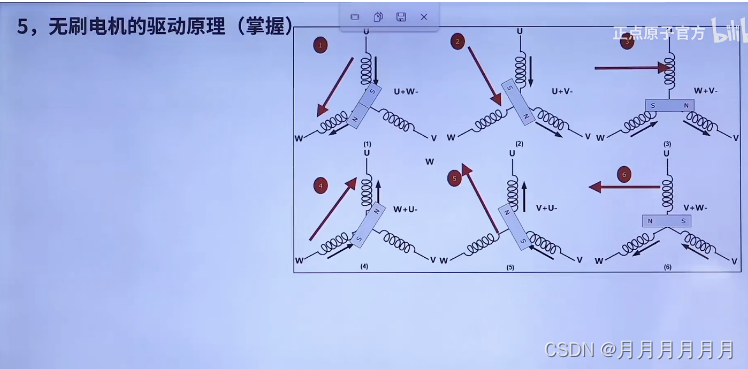
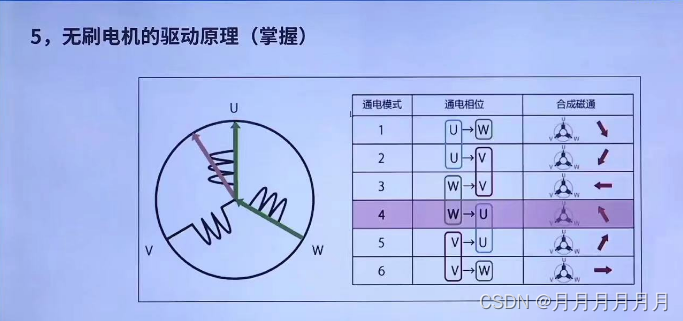
通过对UVW三相电流导通方向的不同,所引起的磁场方向不同,根据磁铁异性相吸,同性相斥的原理,可以看出转子所转动的位置(六步换相)如下图所示。
如何实现三相极性的切换?
当明白了电机转动的原理,那么怎么实现UVW三相电流导通的方向呢,即使用三相逆变电路来实现极性的切换,三个半桥组成(A+和A-;B+和B-;C+和C-)上桥壁和下桥壁,六个MOS管。如下图所示。
但是要注意一点,A+和A-不能同时导通(B+和B-,C+和C-同理)因为同时导通,电流就会直接正负极相连,造成短路。
下图仅为说明原理的简单示意图,实际不可能直接把电源加到线圈上,假如这样做,电机启动就是高速运行,无法做到对电机的速度控制。
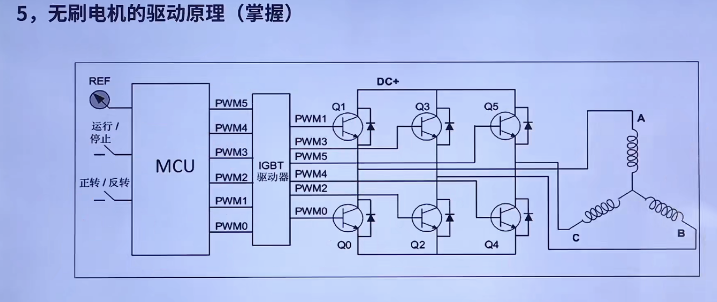
我们一般通过控制MCU输出PWM波来控制三相逆变电路,通过改变占空比,进而调速。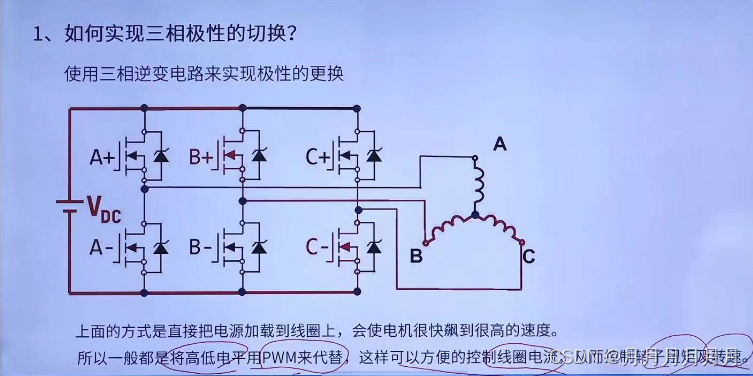
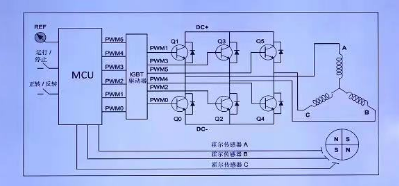
下图为正点原子的无刷直流电机驱动板的原理图。通过使用PWM来代替高低电平的转换。
PWM调速
PWM调速就是用脉冲宽度调制的方法,把恒定的直流电源电压调制成频率一定、宽度可变的脉冲电压序列,从而可以改变平均输出电压的大小,以调节电机转速。其实质是调节方波高电平和低电平的时间比,例如20%占空比波形,是20%的高电平时间和80%的低电平时间,如果占空比调到60%,那么就是60%的高电平时间和40%的低电平时间,占空比越大,输出的脉冲幅度越高,电压越大,转速越高,反之则转速降低。
PWM控制直流无刷电机的常见方法;
e:全桥调制,上下桥壁调制都为PWM调制;mos管不停的开挂开关,对MOS管损耗较大;一般不使用;
a和b:对称型的半桥调制;一半pwm一半高电平;
c和d:不对称型的半桥调制;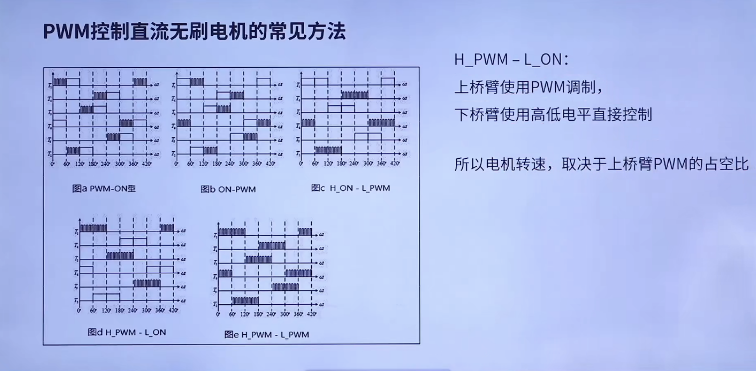
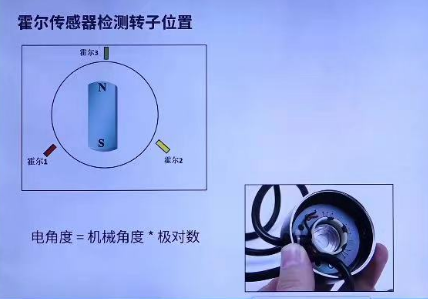
如何确定当前转子的位置?
上面已经了解控制转子的六个节拍的方法,但是如果不知道转子的位置,就不知道何时驱动哪个绕组,所以为了知道转子的当前位置,就需要位置检测。
位置检测可分为有位置传感器(铜锅霍尔传感器读取等);无传感器(通过反电动势读取);
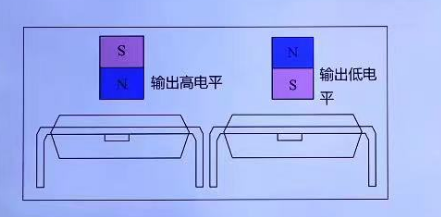 简单理解霍尔传感器的作用,当N级对着霍尔时,输出高电平;当S级对着霍尔时,输出低电平;
简单理解霍尔传感器的作用,当N级对着霍尔时,输出高电平;当S级对着霍尔时,输出低电平;
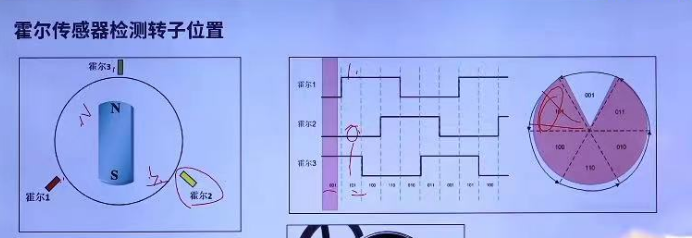
下图真值表只针对正点原子的无刷直流电机,不同电机的真值表有所不同;

 t
t
总结
通过三相逆变电路切换极性,通过控制上桥臂pwm占空比进行调速;
通过位置传感器检测当前转子位置,控制线圈按照真值表顺序通电;

















 1134
1134

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









