







参考文献
[1] 王爱元. 控制电机及其应用[M]. 第一版. 上海:上海交通大学出版社, 2013.
1组成结构
无刷直流电动机利用电子开关线路和位置传感器来代替有刷直流电机电刷和换向器,使其同时具有直流电动机和交流电动机的优良特性。
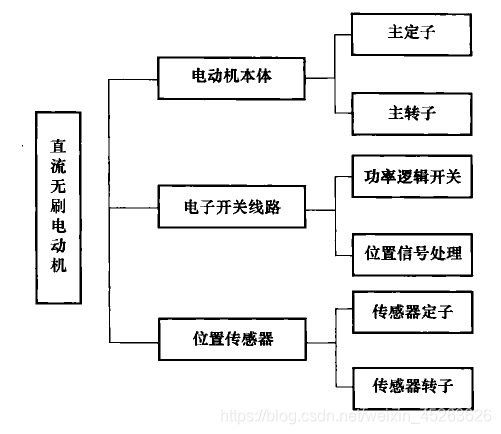
无刷直流电机(驱动系统)主要由电动机本体、位置传感器、电子开关线路三部分组成。
系统的实物组成见下图。
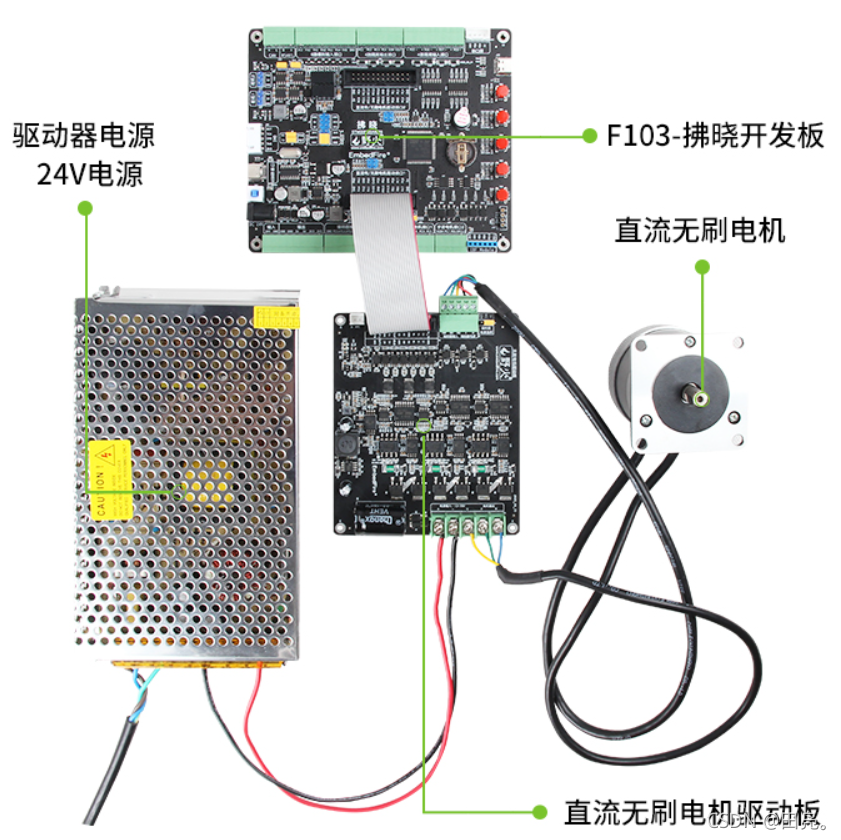
实物照片源自野火57BL75S10-230TF8,下同。本人并未使用过该产品,本处仅做图例。
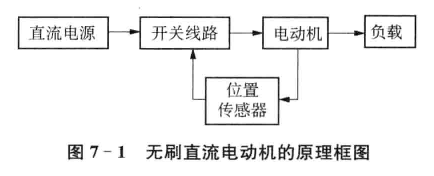
直流电源通过开关线路向电动机电子绕组供电,电动机转子位置由位置传感器检测并提供信号去触发开关线路中的功率开关元件使之导通或截止,从而控制电动机的转动。
1.1电动机本体
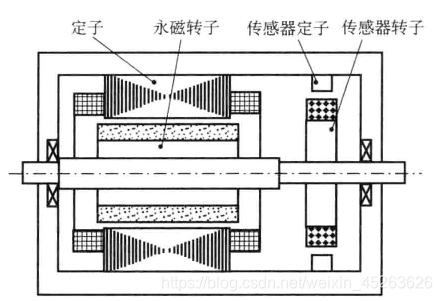
无刷直流电动机的设计思想仍源自普通有刷直流电动机,但与后者相比,其定、转子位置进行了互换。转子上装有永磁体,产生气隙磁通;定子为电枢,结构与普通交流电动机相同,通常采用三相对称绕组,与有刷直流电动机不同,无刷直流电动机的绕组时断续通电的。原直流电动机的电刷和机械换向器被电子开关线路和转子位置传感器代替。
除了普通的内转自无刷直流电动机外,在电动车驱动中还常采用外转子结构。
无刷电动机按照是否使用传感器分为有感电动机和无感电动机。
1.2电子开关线路
电子开关线路实际上是一个电压型逆变器,主要由功率逻辑开关单元和位置传感器信号处理单元两个部分组成。其作用是根据转子位置信号实时地给相应绕组通电(三相交流电),同时根据主控信号调节绕组的通电频率从而调节电机的转速。
无刷直流电动机的电机本体大多采用三相对称绕组,同时功率逆变器又有桥式和非桥式两种,因此无刷直流电机的主开关电路有星形连接三相半桥式、星形连接三相桥式、三角形连接三相桥式三种。目前星形连接的三相桥式主电路应用最多。
1.3转子位置传感器
简述
转子位置传感器的作用是检测电枢绕组相对于转子磁极的位置,以便控制电枢绕组中电流的通断。
转子位置传感器也由定子和转子两部分构成,转子位置传感器的转子部分与电动机本体同轴,可跟踪电动机本体转子的位置;转子位置传感器的定子部分固定于电动机本体定子或端盖上,以感受和输出电动机转子的位置信号。
由于无刷直流电动机的转子是永磁的,常用霍尔传感器作转子位置传感器,采用这种作传感器的无刷电动机称霍尔无刷直流电动机,其体积小,结构简单,但质量欠佳。无刷直流电机很少使用编码器作为位置传感器,这是因为其成本较高、体积较大,且所配电路复杂。
无位置传感器控制
传统无刷直流电机依靠位置传感器的输出信号进行换相控制,但位置传感器在电机内部有限空间内安装,存在较大限制(安装和维护困难,抗干扰性差)。
无位置传感器控制技术即在电动机内部不安装位置传感器,而是在电机外部设置相应的转子位置检测电路,根据检测出的转子位置信号对电动机实施控制。这种技术大多利用定子电压、电流等容易获取的物理量进行转子位置的估算,以获取转子位置信号。
目前最常用的为反电动势过零检测法。
2无刷直流电机的工作原理
略,我目前不关心这个。
3无刷直流电动机的控制技术
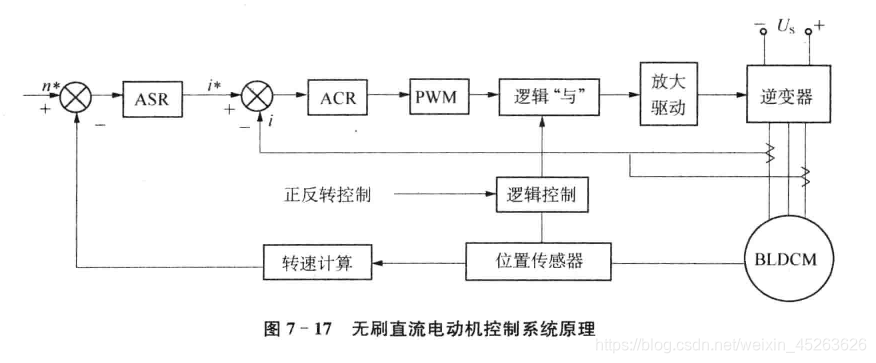
3.1控制系统原理
无刷直流电动机工作在由 位置传感器 控制 电子开关线路 开关通断 的 自控式变频方式下(自动完成),并不需要控制系统加以干预及控制;只要调节直流侧电压即可调节转速,通常采用PWM方式进行调节。
无刷直流电动机常采用转速、电流双闭环控制。ASR和ACR分别为转速和电流调节器,常采用PID算法实现。速度为外环,电流为内环,电流环实际上调节的是电磁转矩。速度给定信号n与速度反馈信号n送给ASR,其输出作为电流信号的参考值i,与电流信号的反馈值仪器送至ACR,其输出为电压参考值,与给定载波比较后,形成PWM调制波,控制电子开关线路的实际输出电压。
逻辑控制单元的任务是根据位置传感器的输出信号及正反转指令信号决定导通相。被确定要导通的相并不总是在导通,还要受PWM信号的控制,逻辑与单元的任务就是把换相信号和PWM信号结合起来,再送到逆变器的驱动电路。
3.2转速控制
无刷直流电动机的转速控制原理同有刷直流电动机,通过调节PWM实现对转速的控制。
转速闭环控制系统中,转速调节器是整个系统的外环,它使电机转速随给定转速变化,一般采用PID转速调节器实现静态无误差控制。
3.3正反转控制
无刷直流电动机不能通过改变电源电压的极性来实现,但无刷直流电动机正反转原理同有刷直流电动机,通常采用改变逆变器开关管的逻辑关系使各相电枢绕组导通顺序发生变化来实现电动机的正反转。对于微机控制的无刷直流电动机调速系统,功率管的导通信号跟随位置信号的切换可通过软件来实现。
为使电动机正反转均能产生最大平均电磁转矩以保证对称运行,必须精确设计转子位置传感器与转子主磁极和定子各相的相互位置关系以及正确的逻辑关系。
3.4 FOC驱动器与电调区别
电调
电调,全称电子调速器(Electronic Speed Control,ESC),相当于电机驱动器,它根据控制信号调节电动机的转速。针对电机不同,可分为有刷电调(两根输出线)和无刷电调(三根输出线)。
电调内的单片机会通过PWM信号线接收启动、停止、制动信号,以控制马达的启动、停止和制动;接收正反转信号,用来控制逆变桥各功率管的通断,使马达产生连续转矩;接收速度指令和速度反馈信号,用来控制和调整马达转速。
FOC驱动器
FOC(field-oriented control,磁场导向控制),又称为矢量控制(vectorcontrol),是一种利用变频器(VFD)控制三相交流马达的技术,利用调整变频器的输出频率、输出电压的大小及角度,来控制马达的输出。
FOC驱动器性能优于电调。
4接线
4.1无刷电机的接线
电源线:

霍尔传感器线:

4.2 FOC驱动器接线
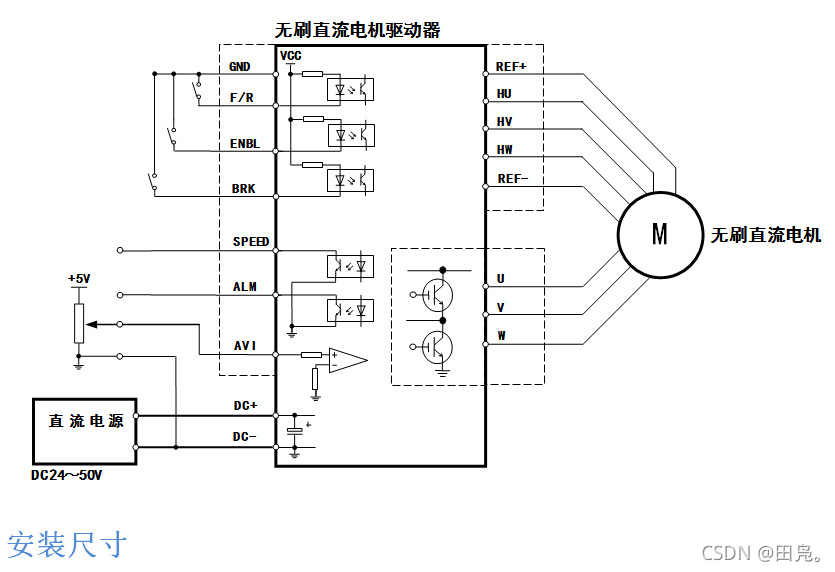
4.3电调接线

电调的输入线与电池连接;电调的输出线(有刷电调为两根,无刷电调为三根)与电机连接;电调的信号线与接收机连接。
更新记录
9.25
将标题从“无刷直流电机 组成结构及其控制原理”修改为“无刷直流电机驱动系统:组成结构及其控制原理”
调整了全文结构,并增补了一些内容。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









