






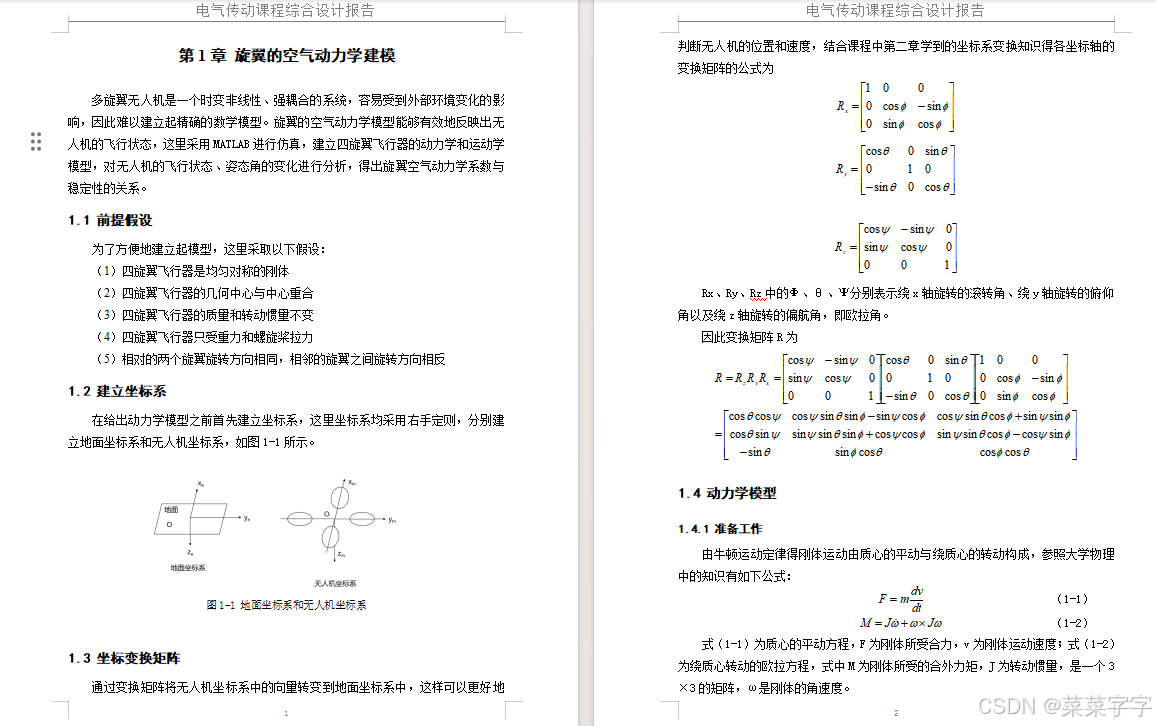
多旋翼无人机是一个时变非线性、强耦合的系统,容易受到外部环境变化的影响,因此难以建立起精确的数学模型。旋翼的空气动力学模型能够有效地反映出无人机的飞行状态,这里采用MATLAB进行仿真,建立四旋翼飞行器的动力学和运动学模型,对无人机的飞行状态、姿态角的变化进行分析,得出旋翼空气动力学系数与稳定性的关系。q:1281738863

多旋翼无人机是一个时变非线性、强耦合的系统,容易受到外部环境变化的影响,因此难以建立起精确的数学模型。旋翼的空气动力学模型能够有效地反映出无人机的飞行状态,这里采用MATLAB进行仿真,建立四旋翼飞行器的动力学和运动学模型,对无人机的飞行状态、姿态角的变化进行分析,得出旋翼空气动力学系数与稳定性的关系。q:1281738863
 502
7460
976
2342
502
7460
976
2342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























