







首先你得理解一个概念
绕一个单位向量u旋转
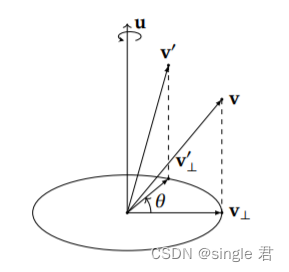
可以用四个参数描述它
一个是角度,还有向量的三个参数
而四元数正是基于此产生
quaternion第一个参数w是角度的1/2的余弦cos
x,y,z是对应的向量参数乘以角度的1/2的正弦sin
这是结论,具体推得很多定理什么的,人麻了
首先你得理解一个概念
绕一个单位向量u旋转
可以用四个参数描述它
一个是角度,还有向量的三个参数
而四元数正是基于此产生
quaternion第一个参数w是角度的1/2的余弦cos
x,y,z是对应的向量参数乘以角度的1/2的正弦sin
这是结论,具体推得很多定理什么的,人麻了

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 1万+
1万+





