






二 控制系统的数学模型2.1 数学模型的引出2.2 微分方程模型2.3 非线性微分方程的线性化
二 控制系统的数学模型
2.1 数学模型的引出
数学模型:是描述系统的输出变量与输入变量(或内部变量)之间关系的数学表达式
为什么要建立控制系统的数学模型:以便定量地给出系统中一些变量之间的相互关系。从而对控制系统进行各种分析和设计,包括稳定性和动态响应的性能分析。
有哪些形式的数学模型可以用于描述控制系统:如果只需要反映系统静态关系(变量不是时间函数)就可以用代数方程;如果要表示系统输入和输出之间的动态关系,就可以用微分方程或偏微分方程(连续系统)、差分方程(离散系统)。控制系统分析中,往往更关注系统输入和输出之间的动态关系。经典控制重点关注连续系统,而离散控制系统则会在现代控制部分再进行介绍。
如何建立一个控制系统的数学模型?
机理建模:根据系统的运动学或动力学的规律和机理,如机械系统中的牛顿定律、电系统中的克希霍夫定律等,建立系统的数学表达式。极精确。要求已知所有元部件的结构及对应的物理机理。
实验建模:人为地给系统施加某种典型的输入信号,记录下对应的输出响应数据,通过辨识的方法采用适当的数学模型去模拟逼近该过程,所获得的数学模型称为辨识模型。不需要了解系统内部情况,但不精确。自动控制控制课程中不用实验建模。
建模要求:首先保证准确,才能分析正确结果;其次允许范围内简化数学模型,忽略次要因素。
线性系统:满足叠加原理的系统。叠加原理(加和性f(x1+x2)=f(x1)+f(x2)与齐次性f(kx)=kf(x))即两个作用函数同时作用于系统响应等于两个作用函数单独作用之和。
非线性系统:不满足叠加原理的系统。非线性系统对两个输入量的响应不能单独进行计算,因此系统分析将比较困难,很难找到一般通用方法。但在实际系统中,绝对线性的系统是不存在的,通常所谓的线性系统也是在一 定的工作范围内才保证线性的。
集中参数系统:变量仅仅是时间的函数。动态数学模型通常是微分方程。
分布参数系统:变量不仅是时间函数,而且还是空间的函数。动态数学模型通常是偏微分方程。
定常系统:微分方程的各项系数为常数。
时变系统:系统的微分方程的系数为时间的函数。
单输入单输出系统:系统只有一个输入变量和一个输出变量。
多输入多输出系统:系统有多个输入变量或多个输出变量。
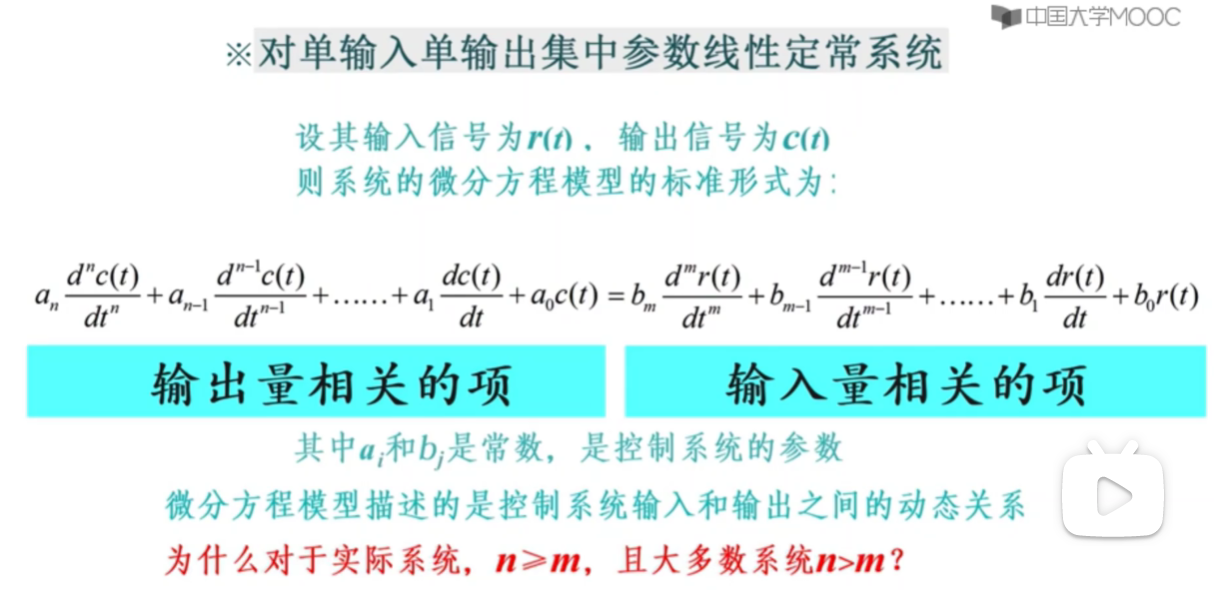
本章讨论的系统:单输入单输出集中参数线性定常系统(线性常系数微分方程)
2.2 微分方程模型
微分方程模型:描述系统输入输出的动态关系数学模型,输入相关项放右边,输出相关项放左边。按照降幂排列。对PPT文字好好分析。
![]() 编辑
编辑
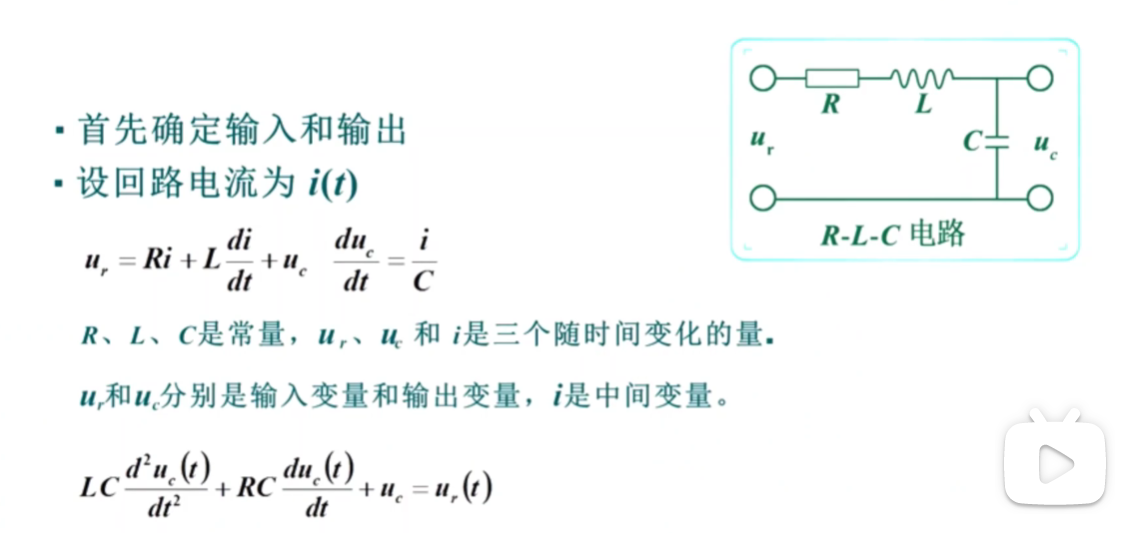
电力系统建模案例:建模步骤
系统原理电路图确定输入输出-> 利用机理与定律建立各个元部件微分方程->消去中间变量化简得到IO微分方程
![]() 编辑
编辑
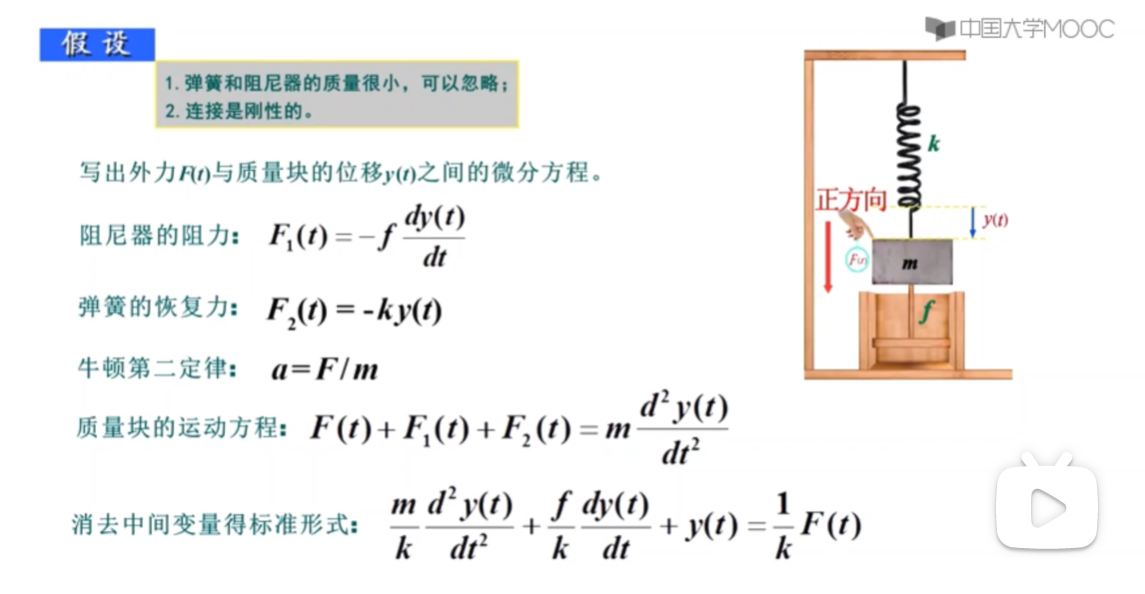
机械系统建模案例:
![]() 编辑
编辑
相似系统:两个系统的输入变化规律形同时候,两个系统输出响应相同。如存在使得电路系统与机械系统的对应系数形同,那么他们就是相似系统,具有相同的微分方程。
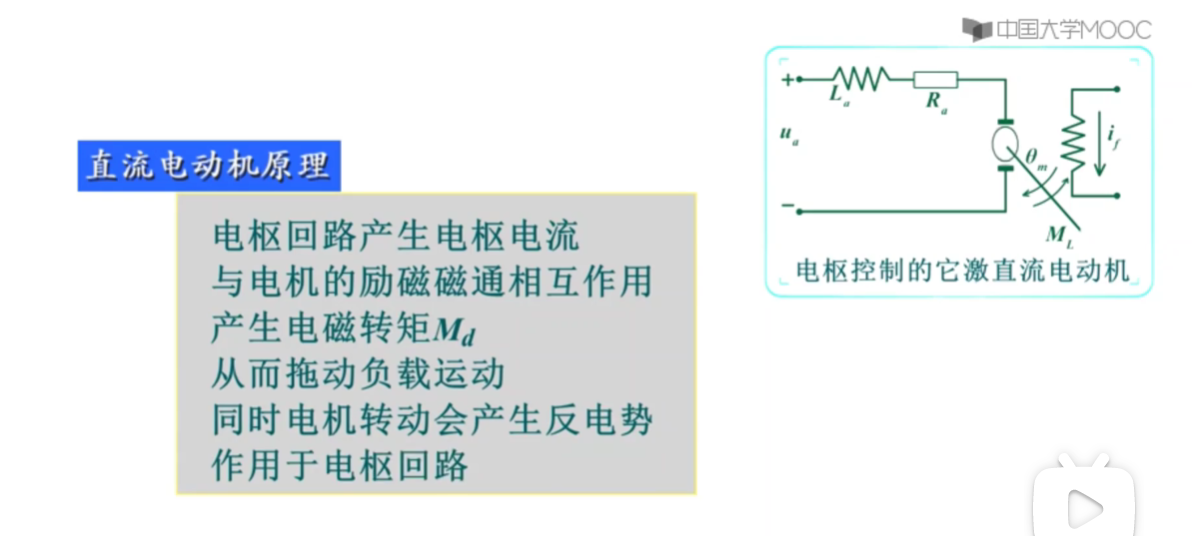
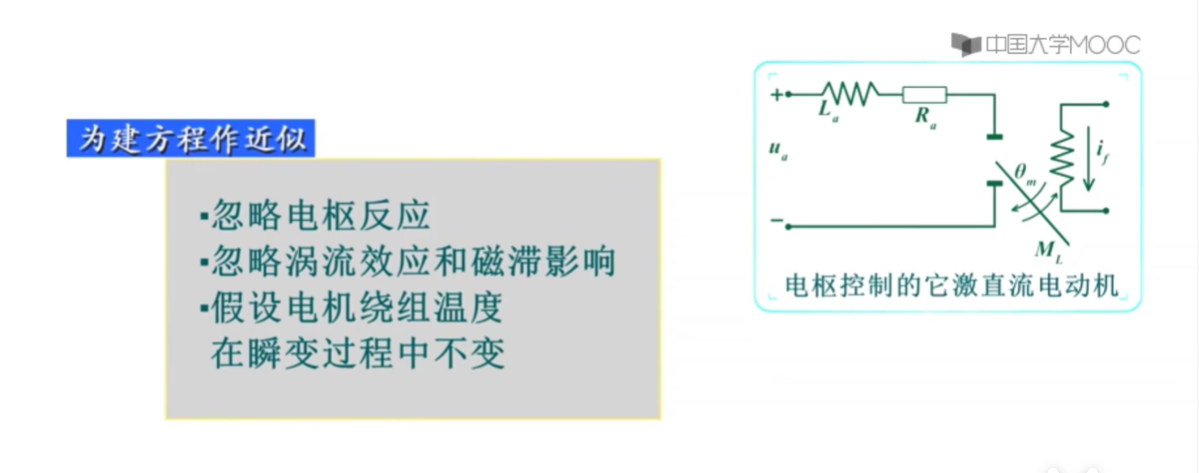
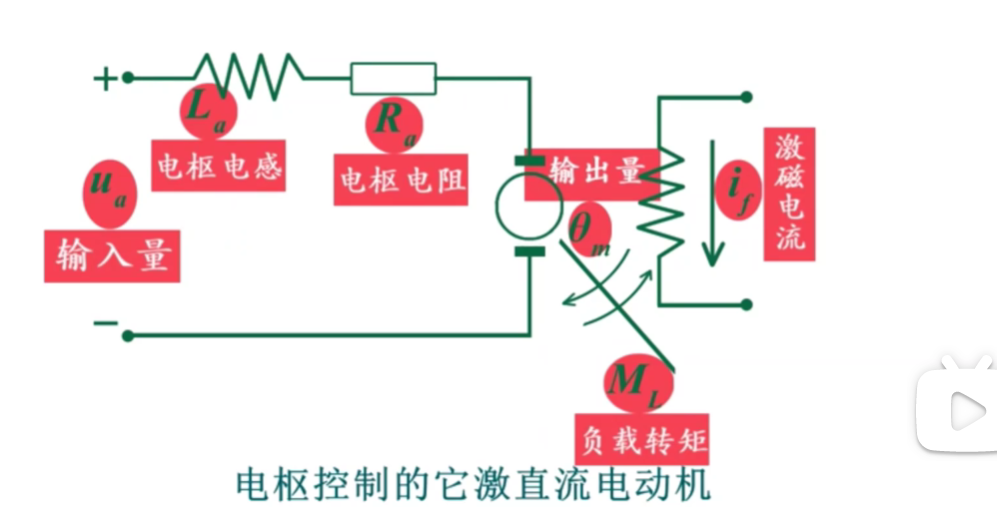
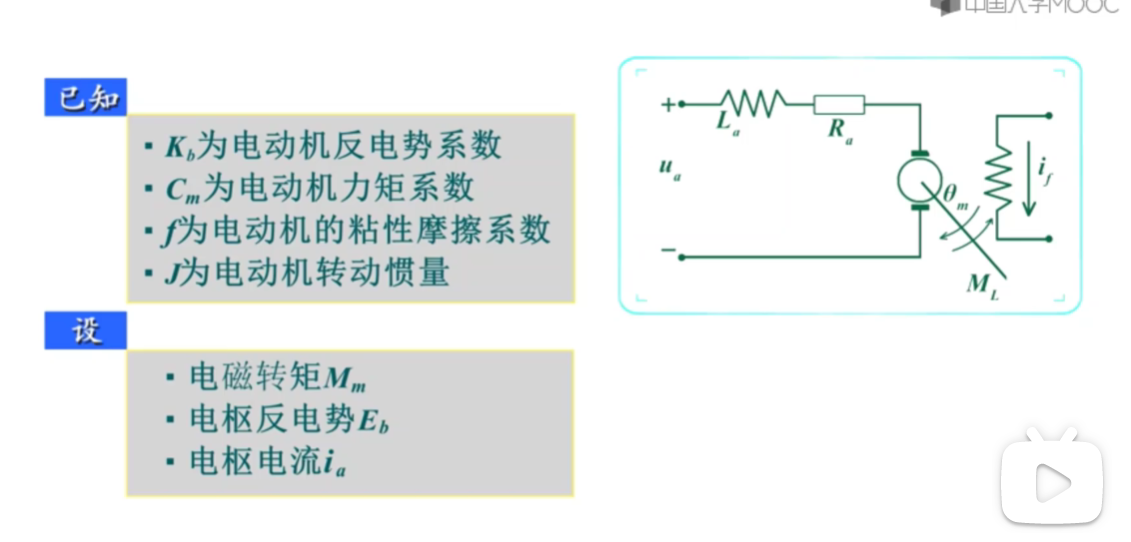
直流电动机原理:
![]()
![]() 编辑
编辑
![]() 编辑
编辑
![]() 编辑
编辑
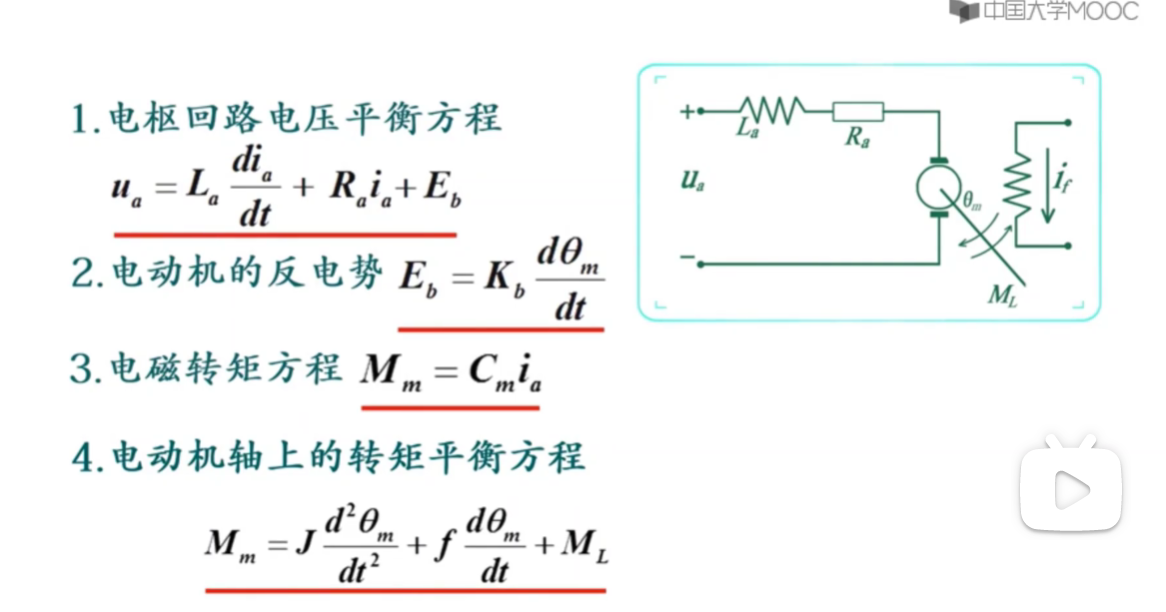
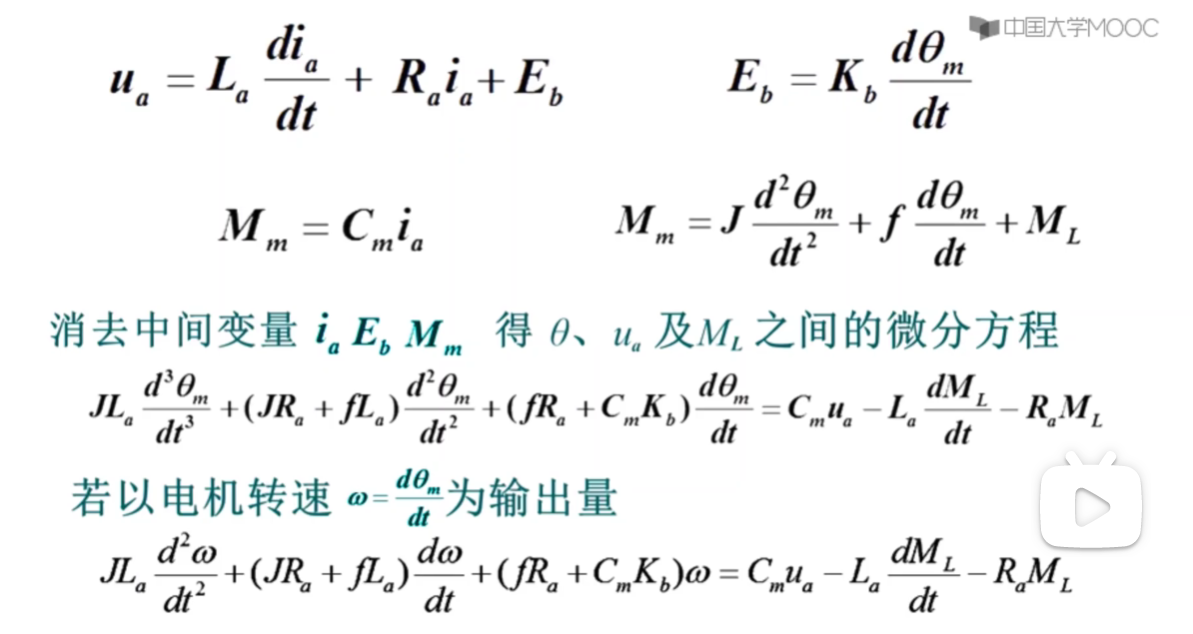
其中反电动势大小与电机角速度成正比;电力驱动电动机转动,电动机转矩大小与电流成正比。粘性摩擦力力矩与角速度成正比;惯性力矩与角的加速度成正比;
电动机轴上的转矩平衡方程:电动机转动要克服惯性,摩擦力,以及负载转矩。
![]() 编辑
编辑
建立好上面的4个方程进行消除中间变量,其中ML是输入扰动,不是中间变量。不能消除它是输入变量。其中输入变量Ua,输出变量角位移。得到输入输出关系的动态微分方程。
![]() 编辑
编辑
如果以角度为输出,那么就是三阶微分方程,以角速度为输出就是二阶微分方程,可见如果我们关心的输出变量不同,即使对于同样系统,数学模型就会不同。
![]() 编辑
编辑
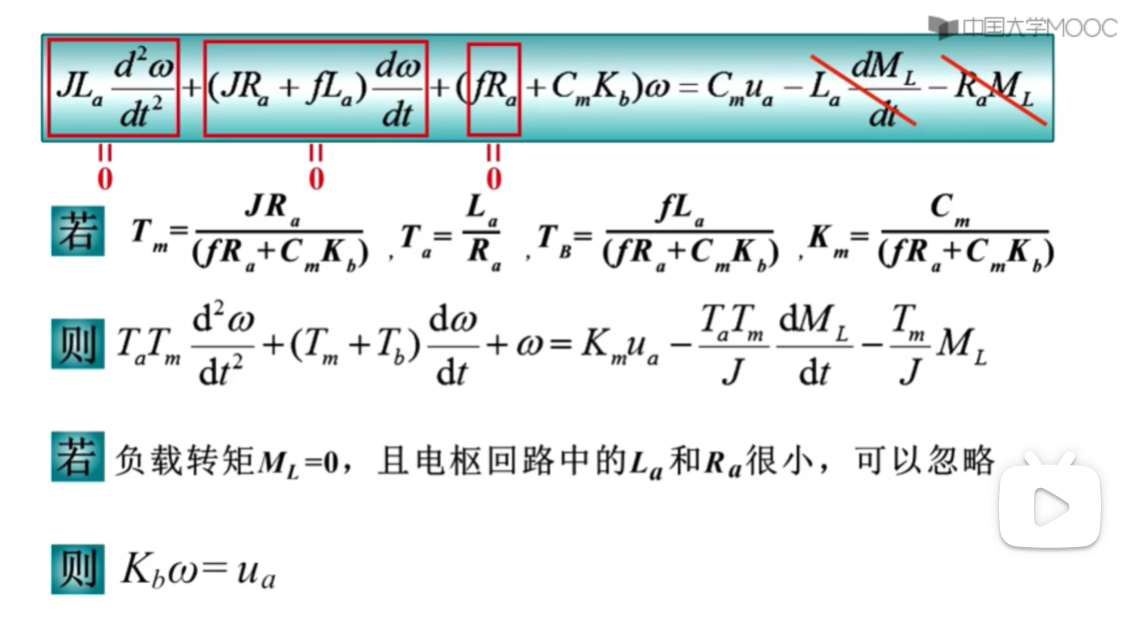
经过假设负载为0等一系列操作把微分方程化简成代数方程,这样一来把电动机变成了线性原件,可以把测量控制转速转换为测量控制电压问题。称为测速发电机。以上是开环控制系统,输入电压后如果负载发生变化,无法保证输出量还能达到预期规律运行。
![]() 编辑
编辑
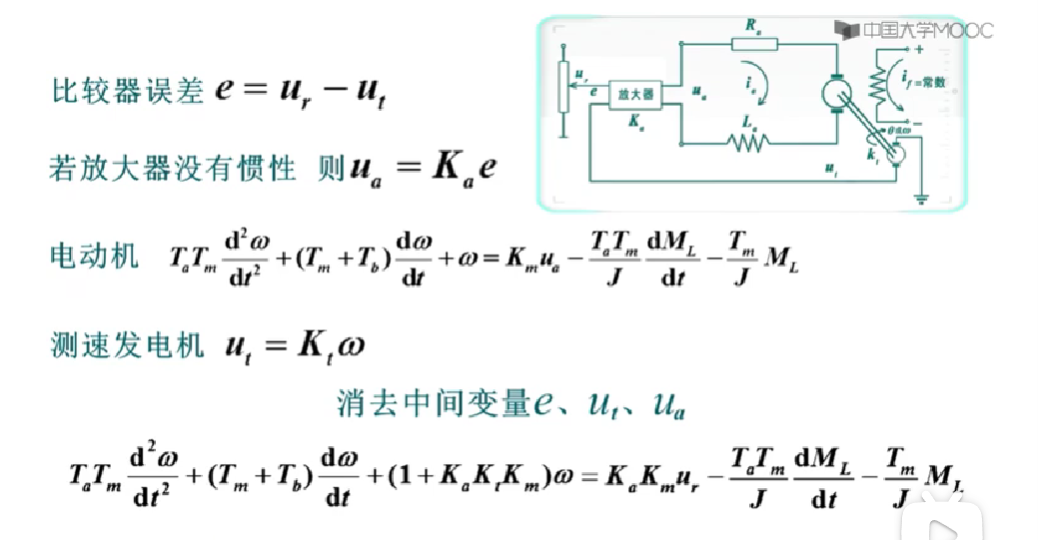
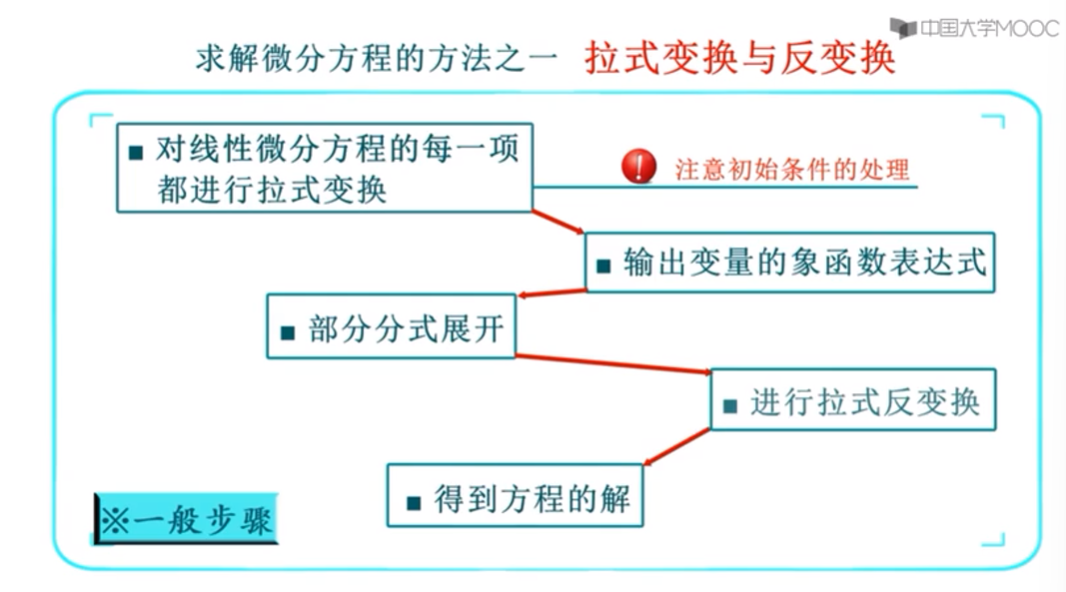
这里设计成闭环控制系统,消掉中间变量,得到闭环控制系统输入输出的微分方程,这个方程是讨论如何设计参数,让系统稳定运转基础(即根据输入来画出输出响应,其中参数Ka就决定系统响应的性能,因此控制系统就是先选择控制器先建模然后设计控制器参数来达到我们响应的指标,如果达不到换控制器重新建模分析)。得到微分方程就是分析它就是在初始条件与一定的输入信号下的系统输出响应。求解微分方程方法之一就是拉普拉斯如下内容。
![]() 编辑
编辑
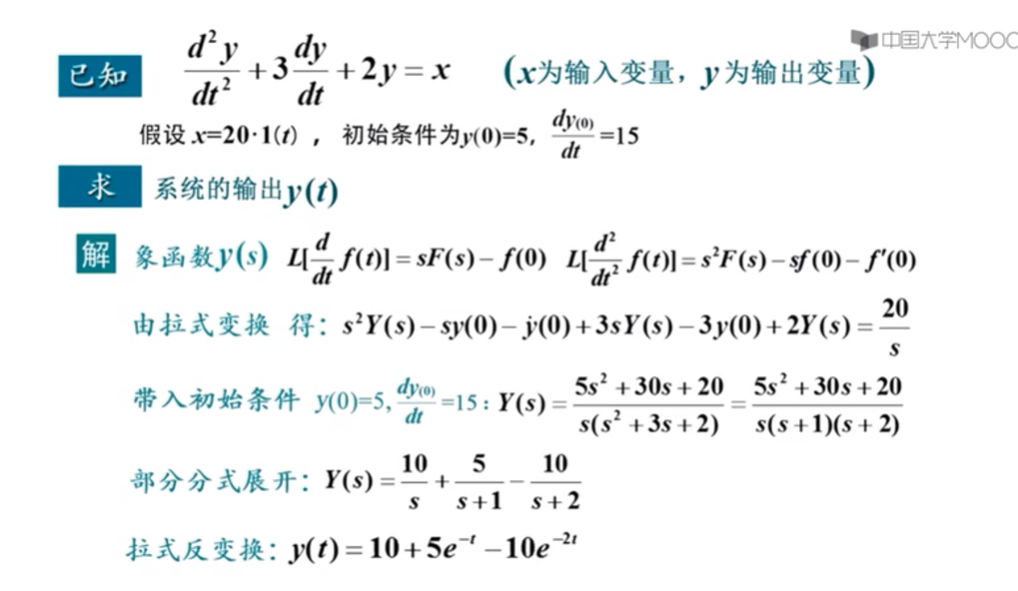
![]() 编辑
编辑
有了输出响应就可以画出曲线来分析系统各方面性能了,输入与输出关系图如下。但系统的参数如果改变那么又需要重新求出输出响应来分析系统性能,很不方便。那么对于参数变化的系统这么分析其系统性能呢?有其他方法解决吗。请往下学。
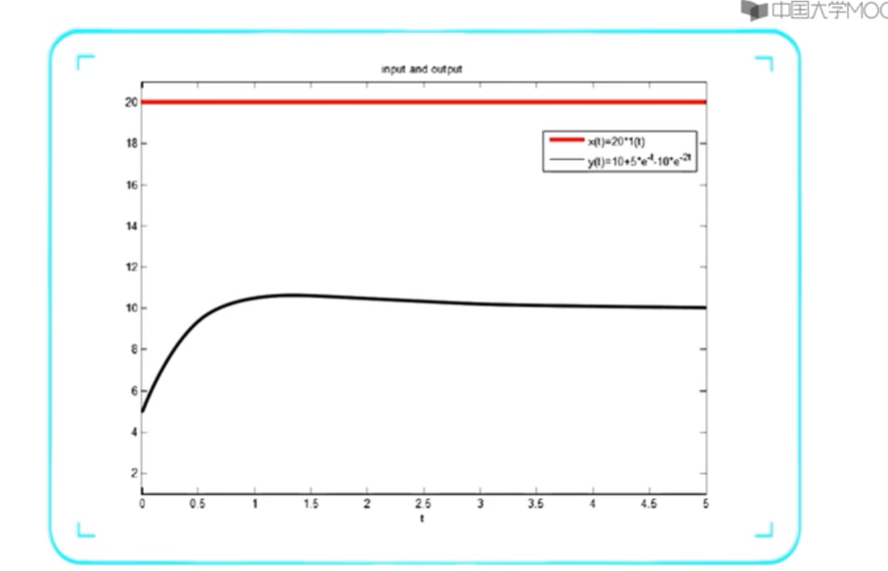
![]() 编辑
编辑
2.3 非线性微分方程的线性化
为什么要进行线性化:严格的说,几乎所有元件或系统的运动方程都是非线性方程,即输入、输出和扰动等之间的关系都是非线性的。这样系统求解分析极其复杂,如果在允许误差范围内,进行线性化处理,具有叠加原理就大大简化分析。
什么是非线性数学模型的线性化:在一定的条件下或在一定范围内把非线性数学模型化为线性模型的处理方法。
符合什么条件的系统可以进行线性化呢?
条件1: 即在工程实践中,控制系统都有一个额定的静态工作状态和工作点(如水位高度),当变量在工作点附近作小范围的变化时,就满足线性化条件。称为小偏差理论或小信号理论。
条件2: 在工作点附近各阶导数或偏导数存在。
如何进行线性化呢?
![]() 编辑
编辑
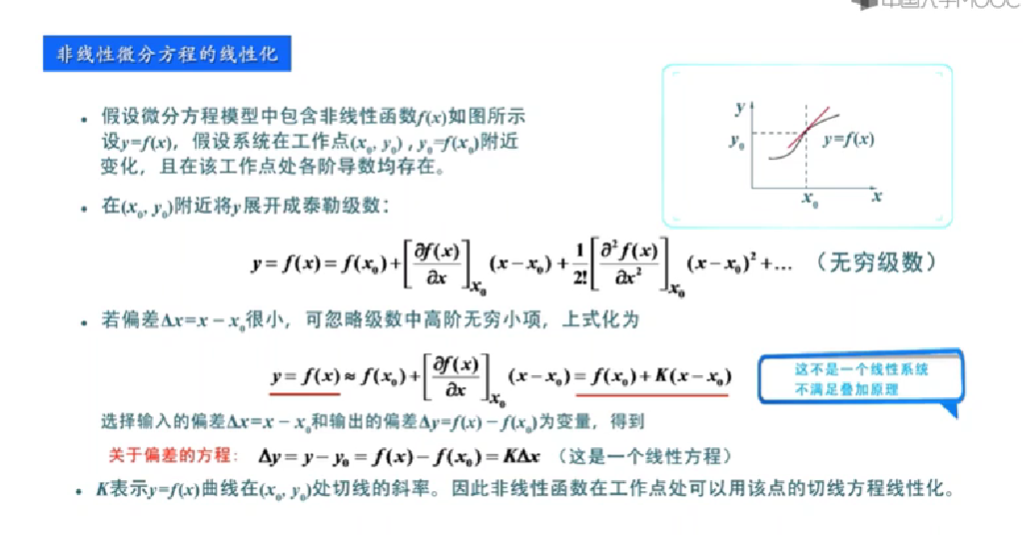
小偏差法:在给定工作点的邻域内将非线性函数展开为泰勒级数,忽略级数中的高阶项,得到只包含偏差的一次项的线性方程。
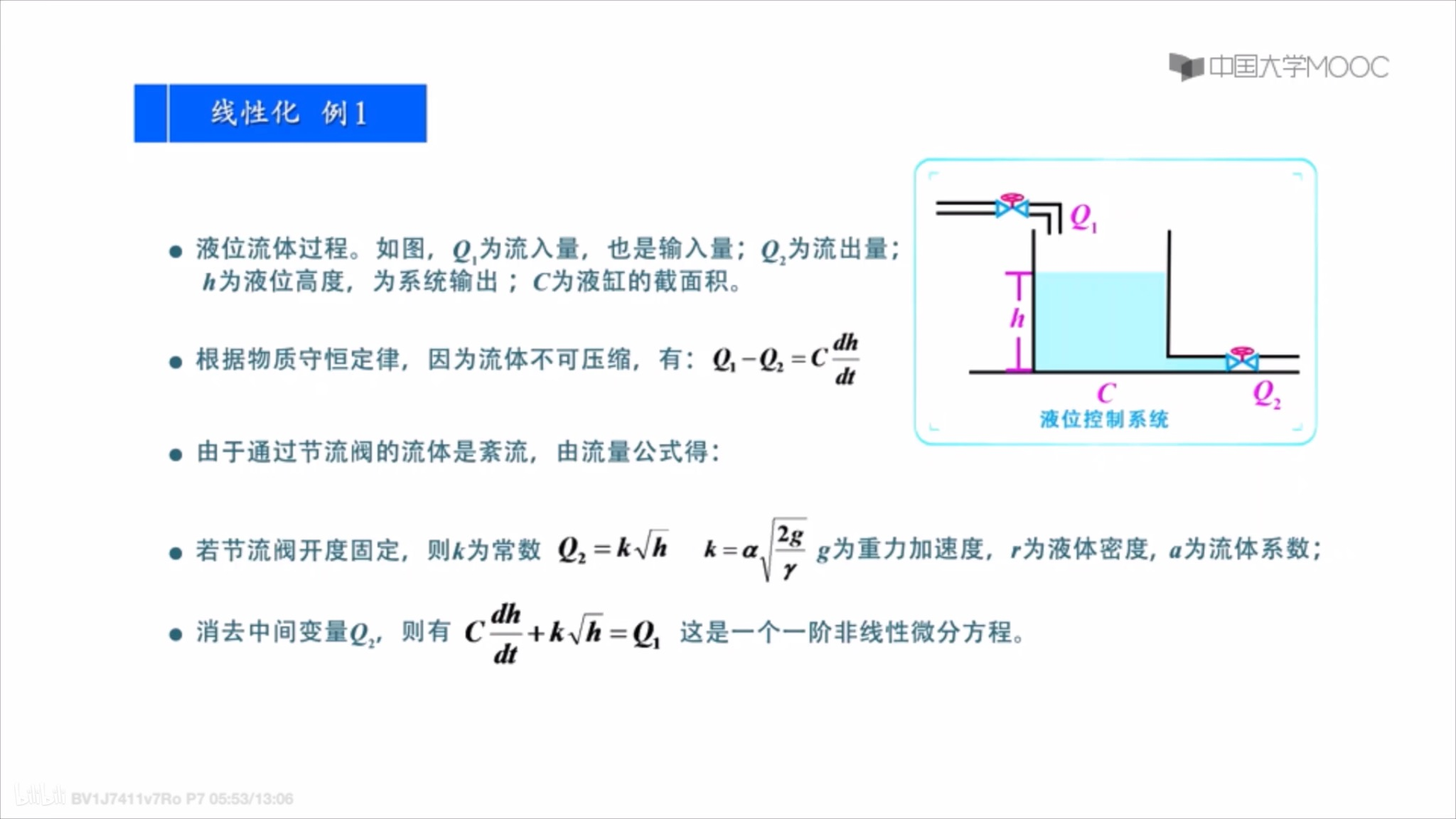
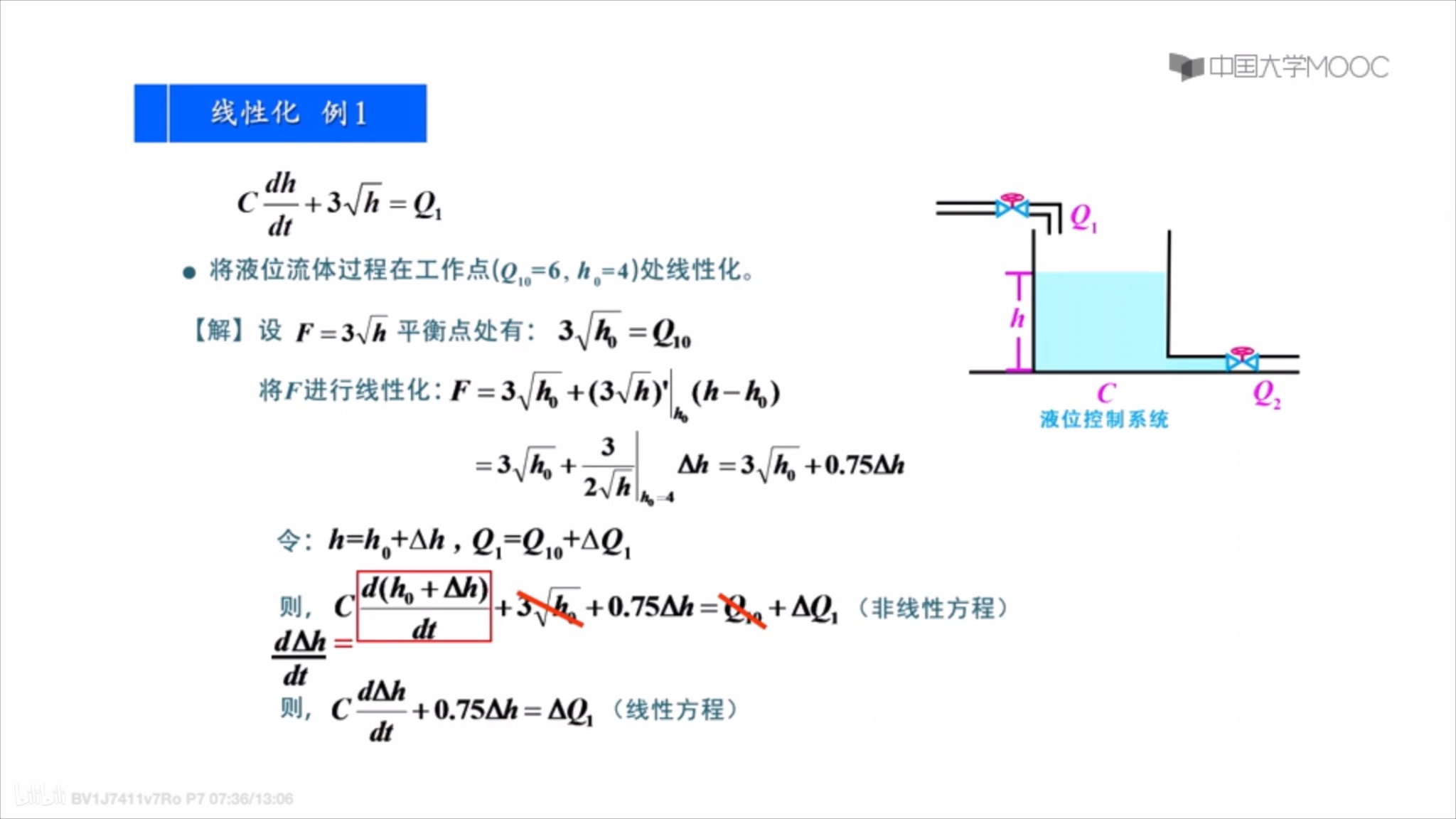
线性化案例1:单变量的非线性函数处理案例
![]() 编辑
编辑
这个液位控制系统为一阶非线性控制方程,启动阶段液位上升到工作点,正常工作后液位仅仅在工作点附近变化,因此满足小偏差理论。下面假设K = 3进行线性化处理。值得注意是在线性化之前需要确定工作点,不同工作点的线性化函数不一样。
![]() 编辑
编辑
线性化案例2:多自变量的非线性函数处理案例
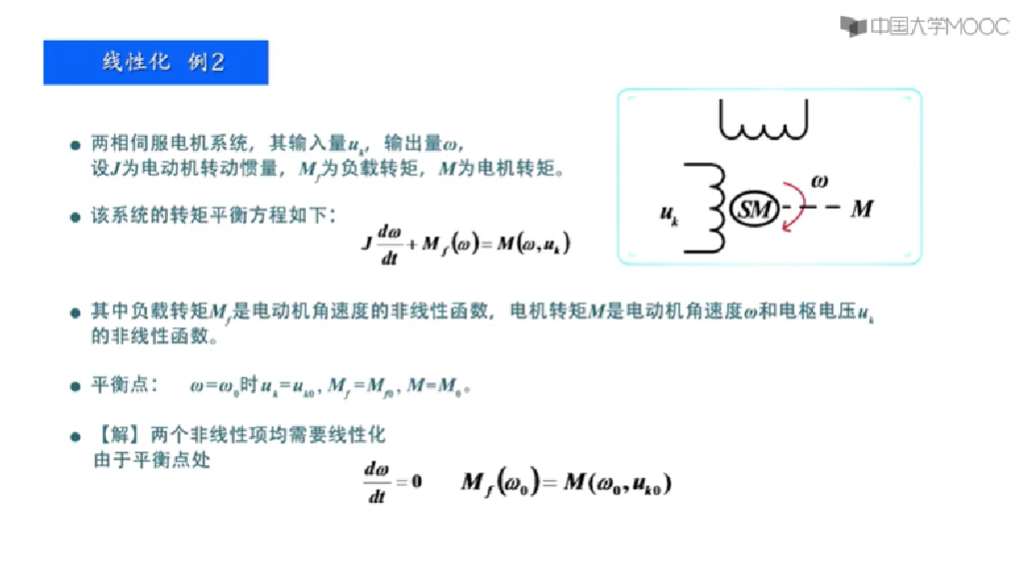
![]() 编辑
编辑
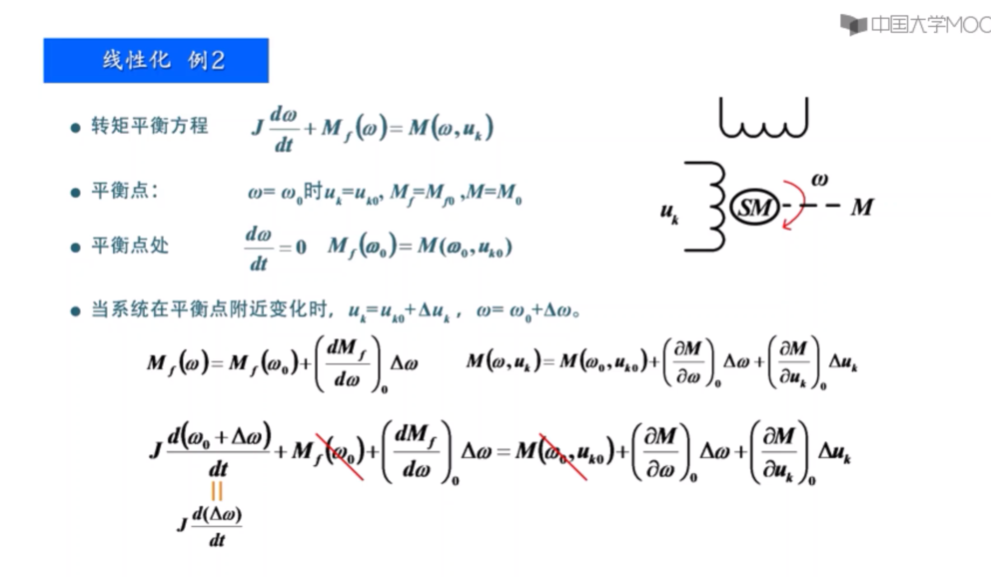
![]() 编辑
编辑
![]() 编辑
编辑
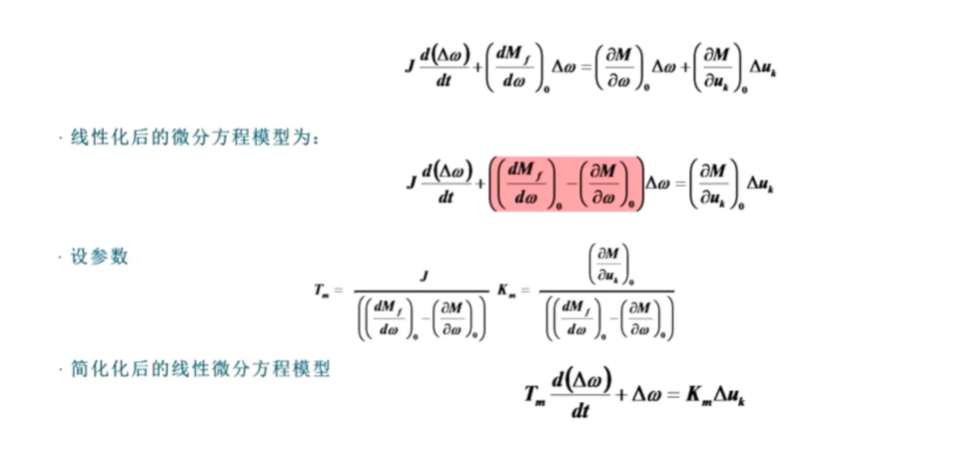
注意以下的非线性化几点
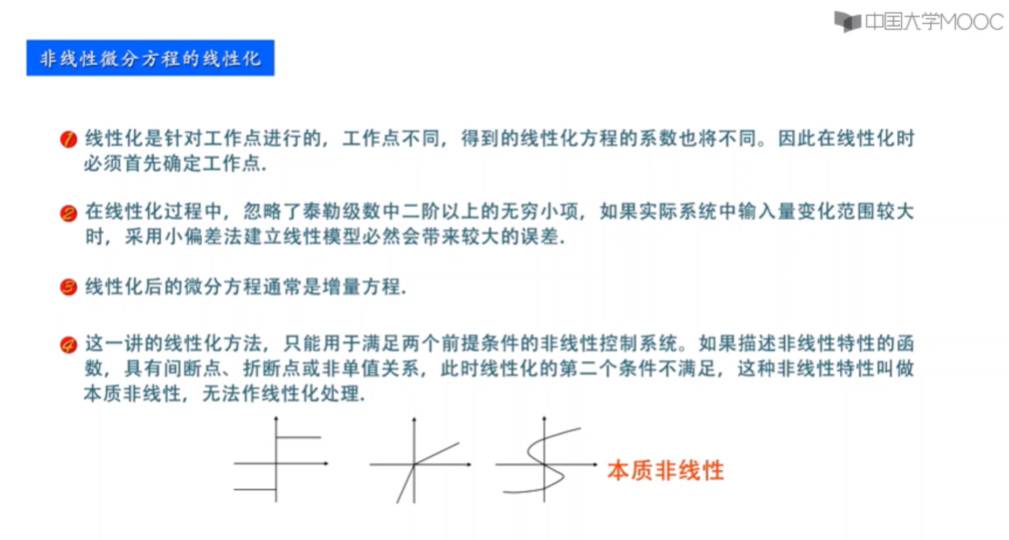
![]() 编辑
编辑
出去线性化处理非线性系统的方法外,更多用现代控制理论深入学习非线性系统处理方法。
















 2453
2453











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











