









半车模型悬架系统的simulink仿真
一、确定半车悬架系统的模型参数
半车模型悬架系统的模型参数如下:
Lf=0.9(m)
Lr=1.2(m)
Mb=1200(kg)
Iyy=2100(kg·m2)
Kf=28000(N/m)
Kr=21000(N/m)
Cf=2500(N·s/m)
Cr=2000(N·s/m)

二、确定初始条件
z(0) = -0.12(m)
theta(0) = -8.7e-20(rad)
dottheta(0) = 8.04e-28(rad/s)
三、确定外部的初始条件

My

road height
四、确定需要仿真的物理量
1、前后悬架作用在车体上的力;
2、俯仰振动角位移和角速度;
3、车辆垂直振动位移和速度;
五、搭建仿真模型
4.1搭建前悬架模型
在模块库中分别拖出“Gain”、“Mux”、“Subtract”、“Add”等多种模块,按图1所示搭建好前悬架的模型图,更改各个模块中参数以及Block name,再使用快捷键“Ctrl+G”将结构图封装。

图1
4.2搭建后悬架模型
在模块库中分别拖出“Gain”、“Mux”、“Add”等多种模块,按图2所示搭建好前悬架的模型图,更改各个模块中参数以及Block name,再使用快捷键“Ctrl+G”将结构图封装。

图2
4.3搭建整体模型
在模块库中分别拖出“Gain”、“Mux”、“Add”、“Step”、“Constant”、“Scope”等多种模块,按图3所示搭建好前悬架的模型图,更改各个模块中参数以及Block name。

图3
将图2中My和road height中的信号分别设置为图4和图5所示:

图4

图5
分别设置z、theta以及dottheta的初始值,分别如图6、图7和图8所示:
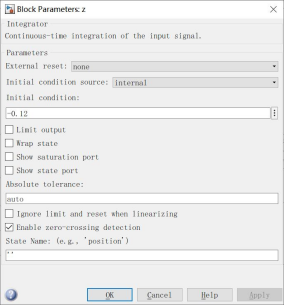
图6
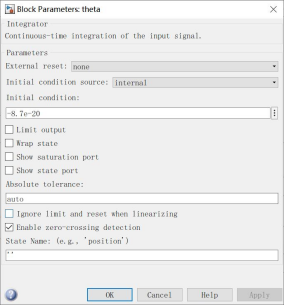
图7
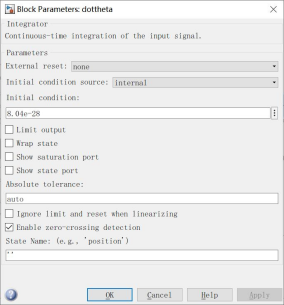
图8
六、仿真信号输出
设置仿真时间,开始仿真,仿真结果如下:
1、前悬架和后悬架作用在车体上的力分别如图9和图10所示:

图9

图10
2、俯仰振动角速度

图11
3、车辆垂直振动速度

图12
关注公众号获取源文件
















 8905
8905











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









