






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
四旋翼飞行器控制、路径规划和轨迹优化是指对无人机进行飞行控制、路径规划和轨迹优化的一系列技术和方法。 针对四旋翼飞行器,飞行器控制涉及对飞行器的姿态、位置和飞行动力的控制。这包括姿态稳定控制、高度和位置控制以及导航控制,旨在使飞行器能够实现稳定、精准的飞行。 路径规划是指确定无人机从起始点到目标点的最佳飞行路径的过程。在路径规划中,考虑到飞行器的动力学约束、避障、风场影响等因素,以确保无人机飞行的安全性和效率性。 轨迹优化关注的是对已规划的路径进行进一步优化,以满足特定的性能指标。这可能涉及到对路径进行平滑处理、动态避障、燃料消耗最小化等,以提高飞行效率和降低能量消耗。 这些技术在各种无人机应用中具有广泛的应用,包括但不限于航拍摄影、物流运输、农业植保、搜索与救援以及监测和勘测等领域。通过有效的控制、路径规划和轨迹优化,无人机能够更好地完成各种任务。四旋翼飞行器控制、路径规划和轨迹优化是无人机领域中关键的技术和方法,它们的良好应用能够提高无人机的飞行性能、安全性和效率,并推动无人机在不同应用领域的发展和应用。
四旋翼飞行器作为无人机的一种,其控制、路径规划和轨迹优化是实现自主飞行和高效任务执行的关键技术。以下是对这些方面的详细解析:
一、四旋翼飞行器控制
四旋翼飞行器的控制主要涉及其对姿态、位置和飞行动力的精确管理。这包括:
-
姿态控制:通过调整四个旋翼的转速,实现飞行器的俯仰、滚转和偏航运动,从而保持或改变飞行器的姿态。姿态控制是飞行稳定的基础,对于实现复杂飞行动作至关重要。
-
高度和位置控制:通过调整旋翼的总升力,控制飞行器的垂直运动(上升、下降)和水平位置(前后左右移动)。这通常依赖于精确的传感器数据和先进的控制算法。
-
导航控制:结合GPS、惯性导航系统等设备,实现飞行器的自主导航和定位。导航控制使得飞行器能够按照预设的航线飞行,并在需要时进行调整。
在控制算法方面,常用的有PID控制、模型预测控制等。这些算法通过不断调整控制量,使飞行器的实际状态逐渐接近设定值,从而实现稳定、精准的飞行。
二、路径规划
路径规划是指为四旋翼飞行器确定从起始点到目标点的最佳飞行路径的过程。在路径规划中,需要考虑以下因素:
-
飞行器的动力学特性:包括飞行速度、加速度、转弯能力等,以确保规划的路径是飞行器能够实际飞行的。
-
环境约束:如障碍物、禁飞区、风场等,以避免飞行器在飞行过程中发生碰撞或进入危险区域。
-
任务需求:如最短路径、最优时间、能量消耗等,以满足不同的应用场景和用户需求。
常用的路径规划算法包括A*算法、Dijkstra算法、RRT算法等。这些算法能够在复杂环境中找到满足约束条件的最佳路径。
三、轨迹优化
轨迹优化是在已规划的路径基础上,对飞行器的飞行轨迹进行进一步优化,以提高飞行效率和降低能量消耗。优化目标可能包括:
-
平滑处理:使飞行轨迹更加平滑,减少急转弯和剧烈加速/减速,以提高飞行稳定性和乘客舒适度(对于载人飞行器而言)。
-
动态避障:在飞行过程中实时检测并避开障碍物,确保飞行安全。
-
燃料消耗最小化:通过优化飞行速度和高度等参数,减少燃料消耗,提高飞行经济性。
轨迹优化通常依赖于先进的优化算法和实时数据处理技术,如遗传算法、粒子群优化算法等。
总结
四旋翼飞行器的控制、路径规划和轨迹优化是实现自主飞行和高效任务执行的关键技术。通过精确的控制算法、合理的路径规划和优化的飞行轨迹,可以显著提高飞行器的飞行性能、安全性和效率。这些技术在航拍摄影、物流运输、农业植保、搜索与救援以及监测和勘测等领域具有广泛的应用前景。
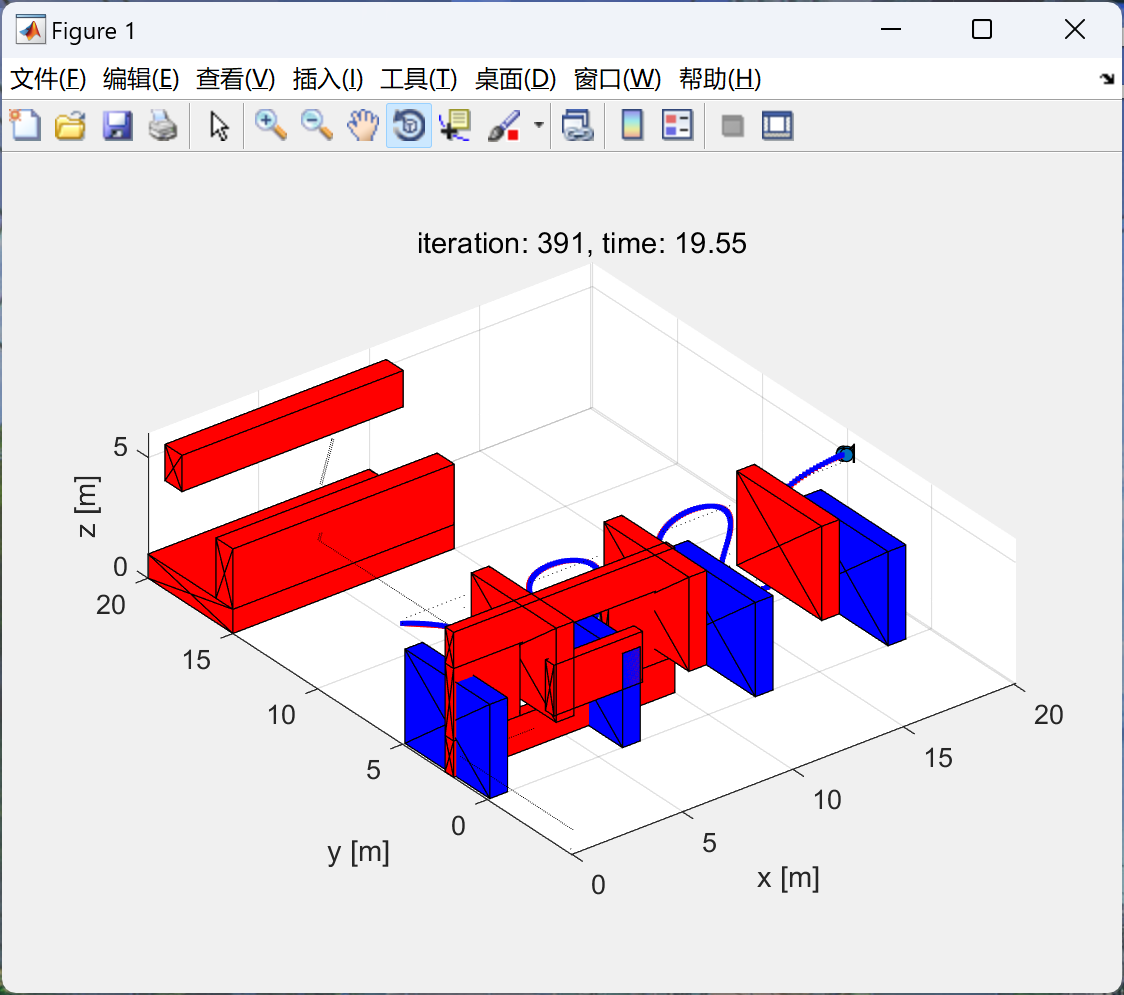
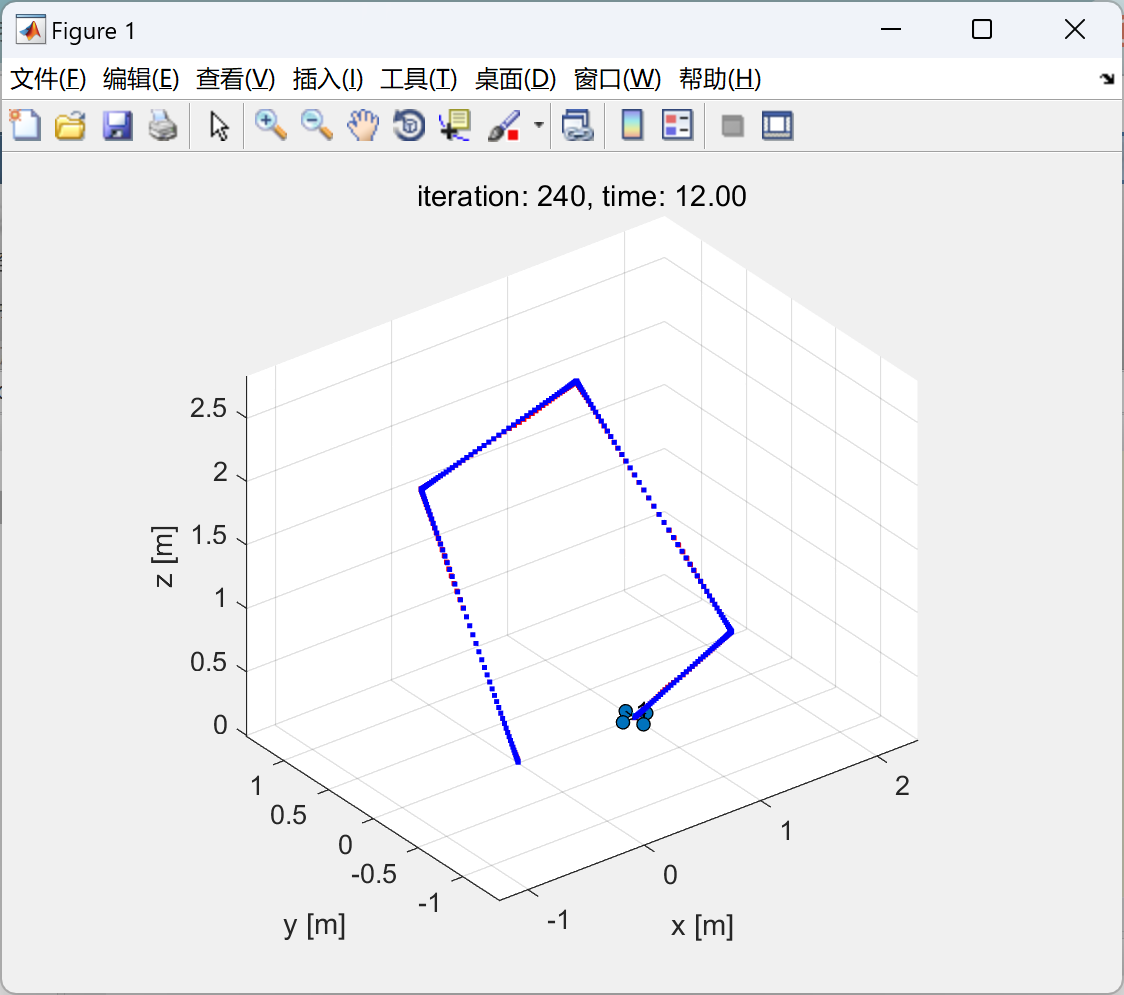
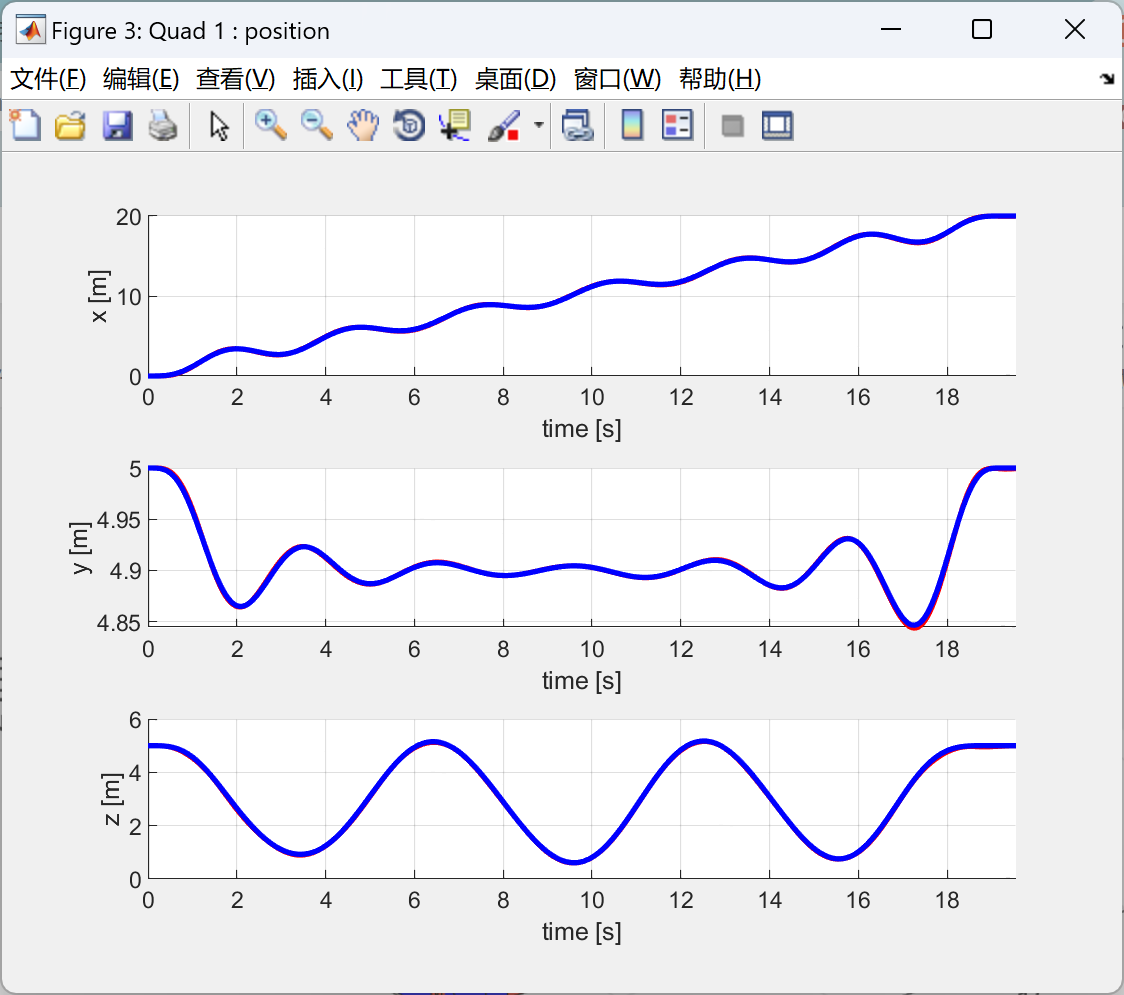
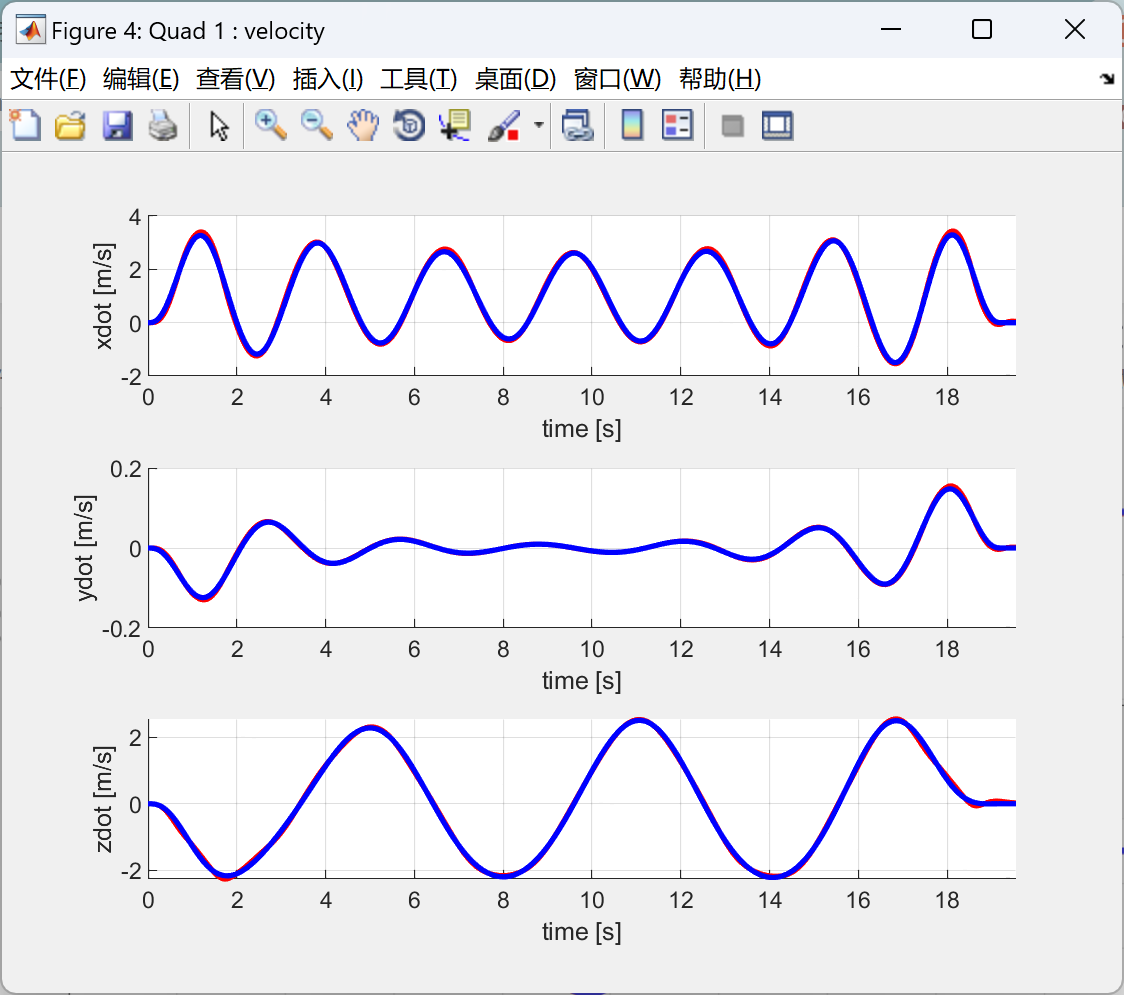
📚2 运行结果

主函数部分代码:
close all
clear all
addpath('utils')
addpath('trajectories')
% You can change trajectory here
% trajectory generator
% trajhandle = @step;
% trajhandle = @circle;
trajhandle = @diamond;
% controller
controlhandle = @controller;
% real-time
real_time = true;
% *********** YOU SHOULDN'T NEED TO CHANGE ANYTHING BELOW **********
% number of quadrotors
nquad = 1;
% max time
time_tol = 25;
% parameters for simulation
params = crazyflie();
%% **************************** FIGURES *****************************
fprintf('Initializing figures...\n')
h_fig = figure;
h_3d = gca;
axis equal
grid on
view(3);
xlabel('x [m]'); ylabel('y [m]'); zlabel('z [m]')
quadcolors = lines(nquad);
set(gcf,'Renderer','OpenGL')
%% *********************** INITIAL CONDITIONS ***********************
fprintf('Setting initial conditions...\n')
max_iter = 5000; % max iteration
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]殷杰,付芳,李凯.基于过时信息年龄最小化无人机路径规划[J/OL].测试技术学报,2024(04):363-370[2024-06-12].http://kns.cnki.net/kcms/detail/14.1301.TP.20240606.0926.006.html.
[2]王广生,孙祎峥,孙海军,等.内河船舶尾气监测的多无人机路径规划研究[J].港口航道与近海工程,2024,61(01):93-98.DOI:10.16403/j.cnki.ggjs20240118.
🌈4 Matlab代码实现


















 792
792

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









